อะไรคือประเภทของการแกว่งของการแกว่ง การสั่นสะเทือนทางกล พารามิเตอร์ของการเคลื่อนที่แบบสั่น ความผันผวน ความผันผวนเป็นระยะ
ในระบบออสซิลเลเตอร์ มีการเปลี่ยนพลังงานประเภทหนึ่งไปเป็นพลังงานอื่นเป็นระยะ เมื่อพลังงานศักย์ (พลังงานขึ้นอยู่กับตำแหน่งของระบบ) ถูกแปลงเป็นพลังงานจลน์ (พลังงานของการเคลื่อนที่) และในทางกลับกัน
การแสดงภาพกระบวนการแกว่งสามารถทำได้โดยการสร้างกราฟของการแกว่งของมวลแต่ละส่วนในพิกัด t(เวลา) และ y(ความเคลื่อนไหว).
หากพลังงานภายนอกเข้าสู่ระบบออสซิลเลชัน การแกว่งจะเพิ่มขึ้น (รูปที่ 16.6 ก) หากไม่มีการจ่ายพลังงานภายนอกให้กับระบบอนุรักษ์นิยม การแกว่งจะไม่ถูกจำกัด (รูปที่ 16.6 ข) หากพลังงานของระบบลดลง (เช่น เนื่องจากแรงเสียดทานในระบบ dissipative) การสั่นจะลดลง (รูปที่ 16.6 ค)
ลักษณะสำคัญของกระบวนการแกว่งคือรูปร่างของการแกว่ง รูปคลื่น - นี่คือเส้นโค้งที่แสดงตำแหน่งของจุดของระบบออสซิลเลเตอร์ที่สัมพันธ์กับตำแหน่งสมดุล ณ จุดคงที่ในเวลา รูปแบบการสั่นสะเทือนที่ง่ายที่สุดสามารถสังเกตได้ ตัวอย่างเช่น รูปคลื่นของลวดที่ห้อยอยู่ระหว่างสองเสาหรือสายกีต้าร์จะมองเห็นได้ชัดเจน
การสั่นที่เกิดขึ้นในกรณีที่ไม่มีโหลดภายนอกเรียกว่า การสั่นสะเทือนฟรี . การสั่นอิสระของระบบ dissipative ถูกทำให้ชื้นเนื่องจากพลังงานทั้งหมดของระบบลดลง พลังงานของระบบอนุรักษ์นิยมยังคงไม่เปลี่ยนแปลง และการแกว่งอิสระของระบบจะไม่ถูกจำกัด อย่างไรก็ตาม ระบบอนุรักษ์นิยมไม่มีอยู่ในธรรมชาติ ดังนั้นจึงมีการศึกษาการแกว่งของมันในทางทฤษฎีเท่านั้น การสั่นสะเทือนอิสระของระบบอนุรักษ์นิยมเรียกว่า การสั่นสะเทือนของตัวเอง .
ความผันผวนเป็นระยะ คือการสั่นสะเทือนที่ตอบสนองสภาวะ y(t)=y(t+T). ที่นี่ ตู่คือคาบการแกว่ง กล่าวคือ เวลาของการแกว่งครั้งเดียว การสั่นเป็นระยะมีลักษณะสำคัญอื่นๆ เช่นกัน ตัวอย่างเช่น, แอมพลิจูด เอ เป็นครึ่งหนึ่งของวงสวิง a=(y max – y นาที )/2 , ความถี่วงกลม คือจำนวนการแกว่งต่อ 2 วินาที ความถี่ทางเทคนิค ฉคือจำนวนการสั่นในหนึ่งวินาที ทั้งความถี่และช่วงเวลาเหล่านี้เชื่อมโยงถึงกัน:
(Hz), (rad/s).
การสั่นสะเทือนฮาร์มอนิก เป็นการแกว่งที่เปลี่ยนแปลงไปตามกฎหมายหรือที่นี่ – ระยะการสั่น , – ระยะเริ่มต้น .
แรงสั่นสะเทือน เกิดขึ้นภายใต้อิทธิพลของแรงภายนอก
การสั่นสะเทือน เป็นการสั่นแบบบังคับที่เกิดขึ้นด้วยแอมพลิจูดที่ค่อนข้างเล็กและไม่ความถี่ต่ำเกินไป
4. ประเภทของไดนามิกโหลด
การสั่นสะเทือนของโครงสร้างเกิดจากการโหลดแบบไดนามิก โหลดไดนามิกจะเปลี่ยนแปลงตามขนาด ทิศทาง หรือตำแหน่ง ซึ่งต่างจากการโหลดแบบคงที่ พวกเขาแจ้งมวลของระบบเร่งความเร็วทำให้เกิดแรงเฉื่อยซึ่งอาจนำไปสู่การแกว่งที่เพิ่มขึ้นอย่างรวดเร็วและเป็นผลให้โครงสร้างทั้งหมดหรือชิ้นส่วนถูกทำลาย
พิจารณาประเภทหลักของการโหลดแบบไดนามิก
คือภาระที่ใช้กับโครงสร้างหลังจากช่วงระยะเวลาหนึ่ง แหล่งที่มาของโหลดเป็นระยะคือเครื่องจักรและกลไกต่างๆ: มอเตอร์ไฟฟ้า, เครื่องจักรงานโลหะ, พัดลม, เครื่องหมุนเหวี่ยง ฯลฯ หากชิ้นส่วนที่หมุนไม่สมดุลก็จะทำให้เกิด โหลดฮาร์มอนิก (โหลดเปลี่ยนแปลงตามกฎของไซน์หรือโคไซน์) ภาระดังกล่าวเรียกว่า แรงสั่นสะเทือน . คอมเพรสเซอร์ลูกสูบและปั๊ม, เครื่องปั๊ม, เครื่องย่อย, ตอกเสาเข็ม ฯลฯ สร้าง โหลดที่ไม่ใช่ฮาร์มอนิก .โหลดแรงกระตุ้น เกิดจากการระเบิด ของที่ตกลงมา หรือบางส่วนของโรงไฟฟ้า (ค้อน ตอกเสาเข็ม ฯลฯ)
ขนย้ายของ ที่สร้างขึ้นโดยรถไฟ การขนส่งทางรถยนต์ ฯลฯ
อันตรายมาก ไม่กำหนด (สุ่ม) โหลด . สิ่งเหล่านี้คือแรงลม แรงแผ่นดินไหว แรงระเบิด
1. ความผันผวน ความผันผวนเป็นระยะ การสั่นสะเทือนแบบฮาร์มอนิก
2. การสั่นสะเทือนฟรี การสั่นแบบไม่มีแดมป์และแดมเปอร์
3. แรงสั่นสะเทือน เสียงก้อง.
4. การเปรียบเทียบกระบวนการแกว่ง พลังงานของการสั่นของฮาร์มอนิกแบบไม่แดมป์
5. การสั่นในตัวเอง
6. การสั่นของร่างกายมนุษย์และการลงทะเบียน
7. แนวคิดและสูตรพื้นฐาน
8. งาน.
1.1. ความผันผวน ความผันผวนเป็นระยะ
การสั่นสะเทือนฮาร์มอนิก
ความผันผวนกระบวนการที่แตกต่างกันในระดับการทำซ้ำที่แตกต่างกันเรียกว่า
เกิดซ้ำกระบวนการเกิดขึ้นอย่างต่อเนื่องภายในสิ่งมีชีวิตทุกชนิด เช่น การหดตัวของหัวใจ การทำงานของปอด เราตัวสั่นเมื่อเราเย็น เราได้ยินและพูดด้วยการสั่นสะเทือนของแก้วหูและสายเสียง เวลาเดิน ขาของเราจะเคลื่อนไหวแบบสั่น อะตอมที่ทำให้เราสั่นสะเทือน โลกที่เราอาศัยอยู่มีแนวโน้มที่จะผันผวนอย่างน่าทึ่ง
ขึ้นอยู่กับลักษณะทางกายภาพของกระบวนการที่เกิดซ้ำ การสั่นมีความโดดเด่น: เครื่องกล ไฟฟ้า ฯลฯ การบรรยายครั้งนี้กล่าวถึง การสั่นสะเทือนทางกล
ความผันผวนเป็นระยะ
เป็นระยะเรียกว่าการสั่นดังกล่าวซึ่งลักษณะทั้งหมดของการเคลื่อนไหวซ้ำแล้วซ้ำอีกหลังจากช่วงระยะเวลาหนึ่ง
สำหรับการแกว่งเป็นระยะจะใช้ลักษณะต่อไปนี้:
ช่วงเวลาการสั่น T เท่ากับเวลาที่เกิดการสั่นที่สมบูรณ์หนึ่งครั้ง
ความถี่การสั่นν เท่ากับจำนวนการแกว่งต่อวินาที (ν = 1/T);
แอมพลิจูดการสั่น A เท่ากับการกระจัดสูงสุดจากตำแหน่งสมดุล
การสั่นสะเทือนฮาร์มอนิก
สถานที่พิเศษท่ามกลางความผันผวนเป็นระยะถูกครอบครองโดย ฮาร์โมนิกความผันผวน มีความสำคัญเนื่องจากเหตุผลดังต่อไปนี้ ประการแรก การสั่นในธรรมชาติและเทคโนโลยีมักมีลักษณะที่ใกล้เคียงกับฮาร์มอนิกมาก และประการที่สอง กระบวนการเป็นระยะของรูปแบบที่แตกต่างกัน
การสั่นสะเทือนฮาร์มอนิก- นี่คือการแกว่งซึ่งค่าที่สังเกตได้เปลี่ยนแปลงตามเวลาตามกฎของไซน์หรือโคไซน์:
ในวิชาคณิตศาสตร์เรียกฟังก์ชันประเภทนี้ว่า ฮาร์มอนิก,ดังนั้นการสั่นที่อธิบายโดยฟังก์ชันดังกล่าวจึงเรียกว่าฮาร์มอนิก
ตำแหน่งของร่างกายที่ทำการเคลื่อนไหวแบบสั่นมีลักษณะโดย การกระจัดเกี่ยวกับตำแหน่งสมดุล ในกรณีนี้ ปริมาณในสูตร (1.1) มีความหมายดังต่อไปนี้:
X- อคติร่างกายในเวลา t;
แต่ - แอมพลิจูดความผันผวนเท่ากับการกระจัดสูงสุด
ω - ความถี่วงกลมการแกว่ง (จำนวนการสั่นที่เกิดขึ้นใน2 π วินาที) สัมพันธ์กับความถี่การสั่นตามอัตราส่วน
φ = (ωt +φ 0) - เฟสความผันผวน (ณ เวลา เสื้อ); φ 0 - ระยะเริ่มต้นการแกว่ง (ที่ t = 0)
 ข้าว. 1.1.พล็อตออฟเซ็ตเทียบกับเวลาสำหรับ x(0) = A และ x(0) = 0
ข้าว. 1.1.พล็อตออฟเซ็ตเทียบกับเวลาสำหรับ x(0) = A และ x(0) = 0
 1.2. การสั่นสะเทือนฟรี การสั่นแบบไม่แดมป์และแดมเปอร์
1.2. การสั่นสะเทือนฟรี การสั่นแบบไม่แดมป์และแดมเปอร์
ฟรีหรือ เป็นเจ้าของเรียกว่าการแกว่งตัวดังกล่าวที่เกิดขึ้นในระบบที่ปล่อยไว้สำหรับตัวมันเอง หลังจากที่มันหลุดจากสมดุลแล้ว
ตัวอย่างคือการสั่นของลูกบอลที่ห้อยอยู่บนเส้นด้าย ในการที่จะทำให้เกิดการสั่นสะท้าน คุณต้องผลักลูกบอลหรือขยับไปด้านข้างแล้วปล่อย เมื่อผลักแล้วจะแจ้งลูก จลนศาสตร์พลังงานและในกรณีที่มีการเบี่ยงเบน - ศักยภาพ.
การแกว่งอิสระเกิดขึ้นเนื่องจากพลังงานสำรองเริ่มต้น
ฟรี undamped การสั่นสะเทือน
การแกว่งอิสระสามารถทำได้เฉพาะในกรณีที่ไม่มีแรงเสียดทาน มิฉะนั้น พลังงานเริ่มต้นจะถูกใช้ไปเพื่อเอาชนะมัน และช่วงของการแกว่งจะลดลง
ตัวอย่างเช่น ลองพิจารณาการสั่นสะเทือนของร่างกายที่แขวนอยู่บนสปริงไร้น้ำหนัก ซึ่งเกิดขึ้นหลังจากที่ร่างกายเบี่ยงตัวลงแล้วปล่อย (รูปที่ 1.2)
 ข้าว. 1.2.การสั่นสะเทือนของร่างกายในสปริง
ข้าว. 1.2.การสั่นสะเทือนของร่างกายในสปริง
จากด้านข้างของสปริงที่ยืดออก ร่างกายทำหน้าที่ แรงยืดหยุ่น F สัดส่วนกับปริมาณการกระจัด เอ็กซ์:
ตัวประกอบคงที่ k เรียกว่า อัตราสปริงและขึ้นอยู่กับขนาดและวัสดุ เครื่องหมาย "-" แสดงว่าแรงยืดหยุ่นนั้นถูกชี้นำในทิศทางตรงกันข้ามกับทิศทางการกระจัดเสมอ กล่าวคือ สู่ตำแหน่งสมดุล
ในกรณีที่ไม่มีแรงเสียดทาน แรงยืดหยุ่น (1.4) เป็นแรงเดียวที่กระทำต่อร่างกาย ตามกฎข้อที่สองของนิวตัน (ma = F):
 หลังจากย้ายเงื่อนไขทั้งหมดไปทางด้านซ้ายและหารด้วยมวลกาย (m) เราจะได้สมการเชิงอนุพันธ์สำหรับการแกว่งอิสระในกรณีที่ไม่มีแรงเสียดทาน:
หลังจากย้ายเงื่อนไขทั้งหมดไปทางด้านซ้ายและหารด้วยมวลกาย (m) เราจะได้สมการเชิงอนุพันธ์สำหรับการแกว่งอิสระในกรณีที่ไม่มีแรงเสียดทาน:
 ค่า ω 0 (1.6) กลายเป็นเท่ากับความถี่ของวงจร ความถี่นี้เรียกว่า เป็นเจ้าของ.
ค่า ω 0 (1.6) กลายเป็นเท่ากับความถี่ของวงจร ความถี่นี้เรียกว่า เป็นเจ้าของ.
ดังนั้น การสั่นสะเทือนอิสระในกรณีที่ไม่มีแรงเสียดทานจะมีความกลมกลืนกัน หากเมื่อเบี่ยงเบนจากตำแหน่งสมดุล แรงยืดหยุ่น(1.4).
วงกลมของตัวเองความถี่เป็นคุณสมบัติหลักของการสั่นของฮาร์มอนิกอิสระ ค่านี้ขึ้นอยู่กับคุณสมบัติของระบบสั่นเท่านั้น (ในกรณีที่อยู่ระหว่างการพิจารณา น้ำหนักของตัวรถและความแข็งของสปริง) ต่อไปนี้จะใช้สัญลักษณ์ ω 0 แทนเสมอ ความถี่วงกลมของตัวเอง(กล่าวคือ ความถี่ที่การสั่นสะเทือนจะเกิดขึ้นในกรณีที่ไม่มีแรงเสียดทาน)
แอมพลิจูดของการสั่นสะเทือนอิสระถูกกำหนดโดยคุณสมบัติของระบบออสซิลเลเตอร์ (m, k) และพลังงานที่จ่ายให้กับมันในช่วงเวลาเริ่มต้น
ในกรณีที่ไม่มีแรงเสียดทาน การแกว่งอิสระใกล้กับฮาร์มอนิกก็เกิดขึ้นในระบบอื่นเช่นกัน: ลูกตุ้มทางคณิตศาสตร์และฟิสิกส์ (ไม่พิจารณาทฤษฎีของประเด็นเหล่านี้) (รูปที่ 1.3)
ลูกตุ้มคณิตศาสตร์- ร่างเล็ก (จุดวัสดุ) แขวนอยู่บนเส้นด้ายที่ไม่มีน้ำหนัก (รูปที่ 1.3 a) หากด้ายเบี่ยงออกจากตำแหน่งสมดุลด้วยมุม α เล็กน้อย (สูงถึง 5 °) แล้วคลายออก ลำตัวจะแกว่งด้วยคาบที่กำหนดโดยสูตร
 โดยที่ L คือความยาวของเกลียว g คือความเร่งการตกอย่างอิสระ
โดยที่ L คือความยาวของเกลียว g คือความเร่งการตกอย่างอิสระ
 ข้าว. 1.3.ลูกตุ้มคณิตศาสตร์ (ก), ลูกตุ้มกายภาพ (ข)
ข้าว. 1.3.ลูกตุ้มคณิตศาสตร์ (ก), ลูกตุ้มกายภาพ (ข)
ลูกตุ้มกายภาพ- ร่างกายที่แข็งกระด้างซึ่งแกว่งภายใต้การกระทำของแรงโน้มถ่วงรอบแกนนอนคงที่ รูปที่ 1.3 b แผนผังแสดงลูกตุ้มกายภาพในรูปแบบของวัตถุที่มีรูปร่างตามอำเภอใจ โดยเบี่ยงเบนจากตำแหน่งสมดุลโดยมุม α คาบการสั่นของลูกตุ้มกายภาพอธิบายโดยสูตร
 โดยที่ J คือโมเมนต์ความเฉื่อยของวัตถุรอบแกน m คือมวล h คือระยะห่างระหว่างจุดศูนย์ถ่วง (จุด C) กับแกนระงับ (จุด O)
โดยที่ J คือโมเมนต์ความเฉื่อยของวัตถุรอบแกน m คือมวล h คือระยะห่างระหว่างจุดศูนย์ถ่วง (จุด C) กับแกนระงับ (จุด O)
โมเมนต์ความเฉื่อยเป็นปริมาณที่ขึ้นอยู่กับมวลของวัตถุ ขนาด และตำแหน่งสัมพันธ์กับแกนหมุน โมเมนต์ความเฉื่อยคำนวณโดยใช้สูตรพิเศษ
ฟรีการสั่นสะเทือนแดมเปอร์
แรงเสียดทานที่กระทำในระบบจริงเปลี่ยนธรรมชาติของการเคลื่อนไหวอย่างมีนัยสำคัญ: พลังงานของระบบออสซิลเลเตอร์ลดลงอย่างต่อเนื่องและการแกว่งก็เช่นกัน จางหายไปหรือไม่เกิดขึ้นเลย
แรงต้านทานมุ่งไปในทิศทางตรงกันข้ามกับการเคลื่อนไหวของร่างกาย และที่ความเร็วไม่สูงมาก มันจะแปรผันตามความเร็ว:
 กราฟของความผันผวนดังกล่าวแสดงในรูปที่ 1.4.
กราฟของความผันผวนดังกล่าวแสดงในรูปที่ 1.4.
ตามลักษณะของระดับของการลดทอน ใช้ปริมาณไร้มิติเรียกว่า การลดการสั่นสะเทือนแบบลอการิทึมλ.
 ข้าว. 1.4.การกระจัดกับเวลาสำหรับการสั่นสะท้าน
ข้าว. 1.4.การกระจัดกับเวลาสำหรับการสั่นสะท้าน
การลดการสั่นสะเทือนแบบลอการิทึมเท่ากับลอการิทึมธรรมชาติของอัตราส่วนของแอมพลิจูดของการแกว่งก่อนหน้าต่อแอมพลิจูดของการสั่นที่ตามมา
โดยที่ i คือเลขลำดับของการแกว่ง
เป็นเรื่องง่ายที่จะเห็นว่าค่าลดแรงสั่นสะเทือนลอการิทึมหาได้จากสูตร
การลดทอนที่แข็งแกร่งที่
หากเป็นไปตามเงื่อนไข β ≥ ω 0 ระบบจะกลับสู่ตำแหน่งสมดุลโดยไม่มีการสั่น การเคลื่อนไหวดังกล่าวเรียกว่า เป็นระยะรูปที่ 1.5 แสดงสองวิธีที่เป็นไปได้ในการกลับสู่ตำแหน่งสมดุลระหว่างการเคลื่อนที่แบบเป็นระยะ
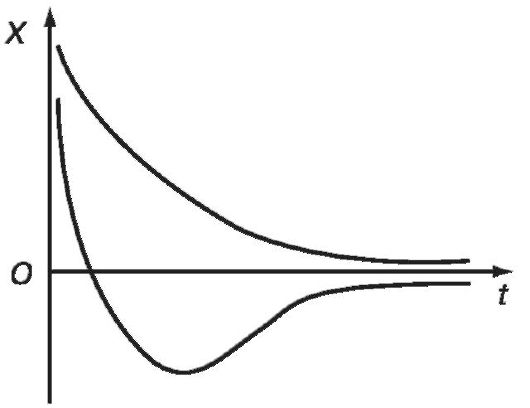 ข้าว. 1.5.การเคลื่อนไหวเป็นระยะ
ข้าว. 1.5.การเคลื่อนไหวเป็นระยะ
1.3. แรงสั่นสะเทือน, เสียงสะท้อน
การสั่นสะเทือนอิสระในที่ที่มีแรงเสียดทานถูกทำให้หมาด ๆ สามารถสร้างการสั่นต่อเนื่องได้โดยใช้การกระทำภายนอกเป็นระยะ
บังคับการสั่นดังกล่าวเรียกว่าในระหว่างที่ระบบการสั่นได้รับแรงภายนอกเป็นระยะ (เรียกว่าแรงผลักดัน)
ให้แรงขับเคลื่อนเปลี่ยนไปตามกฏฮาร์โมนิก
 กราฟของการแกว่งบังคับแสดงในรูปที่ 1.6.
กราฟของการแกว่งบังคับแสดงในรูปที่ 1.6.
 ข้าว. 1.6.พล็อตการกระจัดเทียบกับเวลาสำหรับการสั่นสะเทือนแบบบังคับ
ข้าว. 1.6.พล็อตการกระจัดเทียบกับเวลาสำหรับการสั่นสะเทือนแบบบังคับ
จะเห็นได้ว่าแอมพลิจูดของการสั่นแบบบังคับถึงค่าคงที่ทีละน้อย การสั่นแบบบังคับคงที่นั้นเป็นฮาร์มอนิกและความถี่ของมันเท่ากับความถี่ของแรงขับ:
แอมพลิจูด (A) ของการแกว่งแบบบังคับคงที่หาได้จากสูตร:
 เสียงก้องเรียกว่าความสำเร็จของแอมพลิจูดสูงสุดของการสั่นแบบบังคับที่ค่าความถี่ของแรงขับเคลื่อน
เสียงก้องเรียกว่าความสำเร็จของแอมพลิจูดสูงสุดของการสั่นแบบบังคับที่ค่าความถี่ของแรงขับเคลื่อน
หากเงื่อนไข (1.18) ไม่เป็นที่พอใจ การสั่นพ้องจะไม่เกิดขึ้น ในกรณีนี้ เมื่อความถี่ของแรงขับเคลื่อนเพิ่มขึ้น แอมพลิจูดของการสั่นแบบบังคับจะลดลงอย่างซ้ำซากจำเจ โดยมีแนวโน้มเป็นศูนย์
การพึ่งพาแบบกราฟิกของแอมพลิจูด A ของการสั่นแบบบังคับบนความถี่วงกลมของแรงขับเคลื่อนที่ค่าต่างๆ ของสัมประสิทธิ์การทำให้หมาด ๆ (β 1 > β 2 > β 3) แสดงในรูปที่ 1.7. ชุดของกราฟดังกล่าวเรียกว่าเส้นโค้งเรโซแนนซ์
ในบางกรณี แอมพลิจูดของการสั่นที่เรโซแนนซ์เพิ่มขึ้นอย่างมากอาจเป็นอันตรายต่อความแรงของระบบ มีหลายกรณีที่เสียงสะท้อนนำไปสู่การทำลายโครงสร้าง
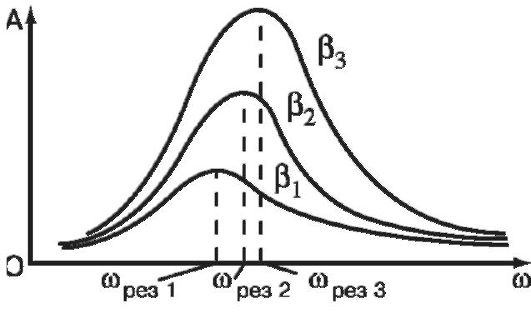 ข้าว. 1.7.เส้นโค้งเรโซแนนซ์
ข้าว. 1.7.เส้นโค้งเรโซแนนซ์
1.4. การเปรียบเทียบกระบวนการแกว่ง พลังงานของการสั่นฮาร์มอนิกไม่แดมป์
ตารางที่ 1.1 แสดงลักษณะของกระบวนการออสซิลเลเตอร์ที่พิจารณา
ตาราง 1.1.ลักษณะของการสั่นสะเทือนแบบอิสระและแบบบังคับ
 พลังงานของการสั่นฮาร์มอนิกไม่แดมป์
พลังงานของการสั่นฮาร์มอนิกไม่แดมป์
ร่างกายที่ทำการสั่นแบบฮาร์มอนิกมีพลังงานสองประเภท: พลังงานจลน์ของการเคลื่อนที่ E k \u003d mv 2 / 2 และพลังงานศักย์ E p ที่เกี่ยวข้องกับการกระทำของแรงยืดหยุ่น เป็นที่ทราบกันดีว่าภายใต้การกระทำของแรงยืดหยุ่น (1.4) พลังงานศักย์ของร่างกายถูกกำหนดโดยสูตร E p = kx 2 /2 สำหรับการสั่นแบบไม่แดมป์ X= A cos(ωt) และความเร็วของร่างกายถูกกำหนดโดยสูตร วี= - ก ωsin(ωt). จากนี้ จะได้รับนิพจน์สำหรับพลังงานของร่างกายที่ทำการแกว่งแบบไม่แปรผัน:
 พลังงานทั้งหมดของระบบซึ่งมีการสั่นของฮาร์มอนิกแบบไม่แดมป์เป็นผลรวมของพลังงานเหล่านี้และยังคงไม่เปลี่ยนแปลง:
พลังงานทั้งหมดของระบบซึ่งมีการสั่นของฮาร์มอนิกแบบไม่แดมป์เป็นผลรวมของพลังงานเหล่านี้และยังคงไม่เปลี่ยนแปลง:
โดยที่ m คือมวลของร่างกาย ω และ A คือความถี่วงกลมและแอมพลิจูดของการแกว่ง k คือสัมประสิทธิ์ความยืดหยุ่น
1.5. ตัวเองสั่น
มีระบบที่ควบคุมการเติมพลังงานที่สูญเสียไปเป็นระยะและสามารถผันผวนได้เป็นเวลานาน
ตัวเองสั่น- การสั่นแบบไม่แปรผันซึ่งได้รับการสนับสนุนจากแหล่งพลังงานภายนอก ซึ่งการจ่ายพลังงานนั้นถูกควบคุมโดยระบบออสซิลเลเตอร์เอง
ระบบที่เกิดการสั่นดังกล่าวเรียกว่า ตัวเองสั่นแอมพลิจูดและความถี่ของการสั่นในตัวเองขึ้นอยู่กับคุณสมบัติของระบบสั่นในตัวเอง ระบบการสั่นในตัวเองสามารถแสดงได้โดยรูปแบบต่อไปนี้:
 ในกรณีนี้ ระบบออสซิลเลเตอร์เอง ผ่านช่องป้อนกลับ ส่งผลต่อตัวควบคุมพลังงาน โดยแจ้งสถานะของระบบ
ในกรณีนี้ ระบบออสซิลเลเตอร์เอง ผ่านช่องป้อนกลับ ส่งผลต่อตัวควบคุมพลังงาน โดยแจ้งสถานะของระบบ
ข้อเสนอแนะเรียกว่าผลกระทบของผลของกระบวนการใด ๆ ที่มีต่อหลักสูตรนั้น
หากผลกระทบดังกล่าวนำไปสู่การเพิ่มความเข้มข้นของกระบวนการ คำติชมจะเรียกว่า เชิงบวก.หากผลกระทบทำให้ความเข้มข้นของกระบวนการลดลง คำติชมจะเรียกว่า เชิงลบ.
ในระบบการสั่นในตัวเอง อาจมีผลตอบรับเชิงบวกและเชิงลบ
ตัวอย่างของระบบสั่นในตัวเองคือ นาฬิกาที่ลูกตุ้มรับแรงกระแทกจากพลังงานของน้ำหนักที่เพิ่มขึ้นหรือสปริงบิดเบี้ยว และการกระแทกเหล่านี้จะเกิดขึ้นในช่วงเวลาที่ลูกตุ้มเคลื่อนผ่านตำแหน่งตรงกลาง
ตัวอย่างของระบบการสั่นในตัวเองทางชีวภาพ ได้แก่ อวัยวะต่างๆ เช่น หัวใจและปอด
1.6. การสั่นของร่างกายมนุษย์และการลงทะเบียน
การวิเคราะห์การสั่นที่เกิดจากร่างกายมนุษย์หรือส่วนต่างๆ ของร่างกายนั้นถูกนำมาใช้กันอย่างแพร่หลายในทางการแพทย์
การเคลื่อนไหวของร่างกายมนุษย์เมื่อเดิน
การเดินเป็นกระบวนการที่ซับซ้อนของการเคลื่อนไหวเป็นระยะซึ่งเป็นผลมาจากกิจกรรมที่ประสานกันของกล้ามเนื้อโครงร่างของลำตัวและแขนขา การวิเคราะห์กระบวนการเดินมีคุณสมบัติในการวินิจฉัยหลายอย่าง
ลักษณะเฉพาะของการเดินคือระยะของท่าพยุงด้วยเท้าข้างเดียว (ระยะประคองเดียว) หรือสองขา (ระยะประคองคู่) โดยปกติอัตราส่วนของช่วงเวลาเหล่านี้คือ 4:1 เมื่อเดินจะมีการเคลื่อนตัวเป็นระยะของจุดศูนย์กลางมวล (CM) ตามแกนตั้ง (ปกติ 5 ซม.) และเบี่ยงเบนไปด้านข้าง (ปกติ 2.5 ซม.) ในกรณีนี้ CM จะเคลื่อนที่ไปตามเส้นโค้ง ซึ่งสามารถแสดงได้โดยฟังก์ชันฮาร์มอนิกโดยประมาณ (รูปที่ 1.8)
 ข้าว. 1.8.การเคลื่อนตัวในแนวตั้งของ CM ของร่างกายมนุษย์ขณะเดิน
ข้าว. 1.8.การเคลื่อนตัวในแนวตั้งของ CM ของร่างกายมนุษย์ขณะเดิน
การเคลื่อนไหวแบบสั่นที่ซับซ้อนในขณะที่รักษาตำแหน่งแนวตั้งของร่างกาย
บุคคลที่ยืนในแนวตั้งประสบกับการสั่นที่ซับซ้อนของจุดศูนย์กลางมวล (MCM) และจุดศูนย์กลางของแรงกด (CP) ของเท้าบนระนาบรองรับ จากการวิเคราะห์ความผันผวนเหล่านี้ สถิติทางสถิติ- วิธีการประเมินความสามารถของบุคคลในการรักษาท่าทางตั้งตรง โดยคงเส้นโครง GCM ไว้ภายในพิกัดของแนวเขตพื้นที่สนับสนุน วิธีนี้ดำเนินการโดยใช้เครื่องวิเคราะห์ความเสถียร ซึ่งส่วนหลักคือแพลตฟอร์มเสถียร ซึ่งตัวแบบอยู่ในตำแหน่งแนวตั้ง การสั่นที่เกิดจาก CP ของตัวอย่างในขณะที่รักษาท่าทางในแนวตั้งจะถูกส่งไปยัง Stabiloplatform และบันทึกโดยสเตรนเกจพิเศษ สัญญาณสเตรนเกจจะถูกส่งไปยังอุปกรณ์บันทึก ในขณะเดียวกันก็มีการบันทึก สโตไคเนซิแกรม -เส้นทางการเคลื่อนที่ของวัตถุทดสอบบนระนาบแนวนอนในระบบพิกัดสองมิติ ตามฮาร์มอนิกสเปกตรัม statokinesigramsเป็นไปได้ที่จะตัดสินคุณสมบัติของแนวตั้งในบรรทัดฐานและด้วยความเบี่ยงเบนจากมัน วิธีนี้ทำให้สามารถวิเคราะห์ตัวบ่งชี้ความมั่นคงทางสถิต (SCR) ของบุคคลได้
การสั่นสะเทือนทางกลของหัวใจ
มีหลายวิธีในการศึกษาหัวใจซึ่งขึ้นอยู่กับกระบวนการทางกลเป็นระยะ
การตรวจหัวใจด้วยคลื่นแม่เหล็กไฟฟ้า(BCG) - วิธีการศึกษาอาการทางกลของกิจกรรมการเต้นของหัวใจโดยพิจารณาจากการลงทะเบียนการเคลื่อนไหวไมโครพัลส์ของร่างกายซึ่งเกิดจากการขับเลือดจากโพรงของหัวใจไปสู่หลอดเลือดขนาดใหญ่ ทำให้เกิดปรากฏการณ์ ผลตอบแทนร่างกายมนุษย์วางอยู่บนแท่นเคลื่อนย้ายได้พิเศษซึ่งอยู่บนโต๊ะตายตัวขนาดใหญ่ แท่นซึ่งเป็นผลมาจากแรงถีบกลับทำให้เกิดการเคลื่อนที่แบบสั่นที่ซับซ้อน การพึ่งพาการเคลื่อนที่ของแท่นกับร่างกายตรงเวลาเรียกว่า ballistocardiogram (รูปที่ 1.9) การวิเคราะห์ซึ่งช่วยให้สามารถตัดสินการเคลื่อนไหวของเลือดและสถานะของการเต้นของหัวใจได้
Apexcardiography(AKG) - วิธีการลงทะเบียนกราฟิกของการสั่นของความถี่ต่ำของหน้าอกในบริเวณยอดตีที่เกิดจากการทำงานของหัวใจ การลงทะเบียน apexcardiogram จะดำเนินการตามกฎบนคลื่นไฟฟ้าหัวใจหลายช่อง
 ข้าว. 1.9.การบันทึก ballistocardiogram
ข้าว. 1.9.การบันทึก ballistocardiogram
กราฟโดยใช้เซ็นเซอร์ piezocrystalline ซึ่งเป็นตัวแปลงการสั่นสะเทือนทางกลเป็นไฟฟ้า ก่อนทำการบันทึกที่ผนังด้านหน้าของหน้าอก จุดที่เต้นเป็นจังหวะสูงสุด (เอเพ็กซ์บีต) ถูกกำหนดโดยการคลำ ซึ่งเซ็นเซอร์จะได้รับการแก้ไข ขึ้นอยู่กับสัญญาณเซ็นเซอร์ การตรวจเอเพ็กซ์คาร์ดิโอแกรมจะถูกสร้างขึ้นโดยอัตโนมัติ การวิเคราะห์แอมพลิจูดของ ACG ดำเนินการ - แอมพลิจูดของเส้นโค้งจะถูกเปรียบเทียบในขั้นตอนต่าง ๆ ของการทำงานของหัวใจโดยมีค่าเบี่ยงเบนสูงสุดจากเส้นศูนย์ - ส่วน EO ซึ่งคิดเป็น 100% รูปที่ 1.10 แสดงเอเพ็กซ์คาร์ดิโอแกรม
 ข้าว. 1.10.การบันทึกเอเพ็กซ์คาร์ดิโอแกรม
ข้าว. 1.10.การบันทึกเอเพ็กซ์คาร์ดิโอแกรม
การตรวจคลื่นไฟฟ้าหัวใจ(KKG) - วิธีการบันทึกการสั่นสะเทือนความถี่ต่ำของผนังหน้าอกที่เกิดจากการทำงานของหัวใจ kinetocardiogram แตกต่างจาก apexcardiogram: ครั้งแรกบันทึกการเคลื่อนไหวที่แน่นอนของผนังหน้าอกในอวกาศส่วนที่สองบันทึกความผันผวนของช่องว่างระหว่างซี่โครงที่สัมพันธ์กับซี่โครง วิธีนี้กำหนดการเคลื่อนที่ (KKG x) ความเร็วของการเคลื่อนไหว (KKG v) และความเร่ง (KKG a) สำหรับการสั่นของหน้าอก รูปที่ 1.11 แสดงการเปรียบเทียบ kinetocardiograms ต่างๆ
 ข้าว. 1.11.บันทึก kinetocardiograms ของการกระจัด (x), ความเร็ว (v), ความเร่ง (a)
ข้าว. 1.11.บันทึก kinetocardiograms ของการกระจัด (x), ความเร็ว (v), ความเร่ง (a)
การตรวจคลื่นไฟฟ้าหัวใจ(DKG) - วิธีการประเมินการเคลื่อนไหวของจุดศูนย์ถ่วงของหน้าอก ไดนาโมคาร์ดิโอกราฟช่วยให้คุณบันทึกแรงที่กระทำต่อหน้าอกของมนุษย์ได้ ในการบันทึกไดนาโมคาร์ดิโอแกรม ผู้ป่วยจะอยู่บนโต๊ะโดยนอนหงาย ใต้หน้าอกมีเครื่องตรวจรับ ซึ่งประกอบด้วยแผ่นโลหะแข็งสองแผ่นขนาด 30x30 ซม. ซึ่งมีส่วนประกอบยืดหยุ่นพร้อมเกจวัดความเครียดติดตั้งอยู่ ขนาดและตำแหน่งของการใช้งานที่เปลี่ยนแปลงเป็นระยะ โหลดที่กระทำบนอุปกรณ์รับประกอบด้วยสามองค์ประกอบ: 1) ส่วนประกอบคงที่ - มวลของหน้าอก; 2) ตัวแปร - ผลทางกลของการเคลื่อนไหวของระบบทางเดินหายใจ 3) ตัวแปร - กระบวนการทางกลที่มาพร้อมกับการหดตัวของหัวใจ
การบันทึกไดนาโมคาร์ดิโอแกรมจะดำเนินการโดยผู้ป่วยกลั้นหายใจในสองทิศทาง: สัมพันธ์กับแกนตามยาวและตามขวางของอุปกรณ์รับ การเปรียบเทียบไดนาโมคาร์ดิโอแกรมต่างๆ แสดงในรูปที่ 1.12.
การตรวจคลื่นไฟฟ้าหัวใจขึ้นอยู่กับการลงทะเบียนการสั่นสะเทือนทางกลของร่างกายมนุษย์ที่เกิดจากการทำงานของหัวใจ ในวิธีนี้โดยใช้เซ็นเซอร์ที่ติดตั้งในบริเวณฐานของกระบวนการ xiphoid แรงกระตุ้นของหัวใจจะถูกบันทึกเนื่องจากกิจกรรมทางกลของหัวใจในช่วงระยะเวลาของการหดตัว ในเวลาเดียวกัน กระบวนการเกิดขึ้นที่เกี่ยวข้องกับการทำงานของตัวรับกลไกของเนื้อเยื่อของเตียงหลอดเลือด ซึ่งจะกระตุ้นเมื่อปริมาตรของเลือดหมุนเวียนลดลง seismocardiosignal สร้างรูปร่างของการสั่นของกระดูกอก
 ข้าว. 1.12.การบันทึกไดนาโมคาร์ดิโอแกรมตามยาวปกติ (a) และตามขวาง (b)
ข้าว. 1.12.การบันทึกไดนาโมคาร์ดิโอแกรมตามยาวปกติ (a) และตามขวาง (b)
การสั่นสะเทือน
การนำเครื่องจักรและกลไกต่างๆ เข้ามาในชีวิตมนุษย์อย่างแพร่หลายช่วยเพิ่มผลิตภาพแรงงาน อย่างไรก็ตามการทำงานของกลไกหลายอย่างเกี่ยวข้องกับการเกิดการสั่นสะเทือนที่ส่งไปยังบุคคลและส่งผลเสียต่อเขา
การสั่นสะเทือน- การสั่นแบบบังคับของร่างกายซึ่งทั้งร่างกายสั่นโดยรวมหรือส่วนต่าง ๆ ที่แยกจากกันสั่นด้วยแอมพลิจูดและความถี่ต่างกัน
บุคคลประสบกับผลกระทบจากการสั่นสะเทือนหลายประเภทในการขนส่ง ที่ทำงาน ที่บ้านอย่างต่อเนื่อง การสั่นสะเทือนที่เกิดขึ้นในบริเวณใดๆ ของร่างกาย (เช่น มือของคนงานที่ถือค้อน) แพร่กระจายไปทั่วร่างกายในรูปแบบของคลื่นยืดหยุ่น คลื่นเหล่านี้ทำให้เกิดการเปลี่ยนแปลงรูปร่างที่หลากหลายในเนื้อเยื่อของร่างกาย (การบีบอัด, ความตึงเครียด, แรงเฉือน, การโค้งงอ) ผลกระทบของการสั่นสะเทือนต่อบุคคลนั้นเกิดจากปัจจัยหลายประการที่กำหนดลักษณะการสั่นสะเทือน: ความถี่ (สเปกตรัมความถี่ ความถี่พื้นฐาน) แอมพลิจูด ความเร็ว และความเร่งของจุดสั่น พลังงานของกระบวนการสั่น
การสัมผัสกับการสั่นสะเทือนเป็นเวลานานทำให้เกิดการรบกวนอย่างต่อเนื่องในการทำงานทางสรีรวิทยาตามปกติในร่างกาย "อาการสั่น" อาจเกิดขึ้นได้ โรคนี้นำไปสู่ความผิดปกติร้ายแรงหลายอย่างในร่างกายมนุษย์
อิทธิพลที่แรงสั่นสะเทือนมีต่อร่างกายขึ้นอยู่กับความรุนแรง ความถี่ ระยะเวลาของการสั่นสะเทือน สถานที่ใช้งานและทิศทางที่สัมพันธ์กับร่างกาย ท่าทาง ตลอดจนสภาพของบุคคลและลักษณะเฉพาะของเขา
ความผันผวนที่มีความถี่ 3-5 Hz ทำให้เกิดปฏิกิริยาของอุปกรณ์ขนถ่ายความผิดปกติของหลอดเลือด ที่ความถี่ 3-15 Hz จะสังเกตความผิดปกติที่เกี่ยวข้องกับการสั่นสะเทือนของอวัยวะแต่ละส่วน (ตับ กระเพาะอาหาร ศีรษะ) และร่างกายโดยรวม ความผันผวนที่ความถี่ 11-45 เฮิรตซ์ทำให้ตาพร่ามัว คลื่นไส้ และอาเจียน ที่ความถี่เกิน 45 เฮิรตซ์ หลอดเลือดสมองเสียหาย การไหลเวียนโลหิตบกพร่อง ฯลฯ เกิดขึ้น รูปที่ 1.13 แสดงช่วงความถี่การสั่นสะเทือนที่มีผลเสียต่อบุคคลและระบบอวัยวะของเขา
 ข้าว. 1.13.ช่วงความถี่ของผลกระทบที่เป็นอันตรายของการสั่นสะเทือนต่อมนุษย์
ข้าว. 1.13.ช่วงความถี่ของผลกระทบที่เป็นอันตรายของการสั่นสะเทือนต่อมนุษย์
ในเวลาเดียวกัน ในบางกรณี การสั่นสะเทือนถูกนำมาใช้ในการแพทย์ ตัวอย่างเช่น การใช้เครื่องสั่นแบบพิเศษ ทันตแพทย์จะเตรียมส่วนผสม การใช้อุปกรณ์สั่นสะเทือนความถี่สูงช่วยให้สามารถเจาะรูที่มีรูปร่างซับซ้อนในฟันได้
การสั่นสะเทือนยังใช้ในการนวด ด้วยการนวดด้วยมือ เนื้อเยื่อที่นวดจะถูกเคลื่อนเข้าสู่การเคลื่อนไหวโดยใช้มือของนักนวดบำบัด ด้วยการนวดด้วยฮาร์ดแวร์จะใช้เครื่องสั่นซึ่งใช้เคล็ดลับของรูปทรงต่าง ๆ เพื่อส่งการเคลื่อนไหวของการสั่นไปยังร่างกาย อุปกรณ์สั่นแบ่งออกเป็นอุปกรณ์สำหรับการสั่นสะเทือนทั่วไป ทำให้เกิดการสั่นของทั้งร่างกาย (สั่น "เก้าอี้" "เตียง" "แพลตฟอร์ม" ฯลฯ) และอุปกรณ์สำหรับการสั่นสะเทือนเฉพาะที่ส่งผลกระทบต่อแต่ละส่วนของร่างกาย
กลไกบำบัด
ในแบบฝึกหัดกายภาพบำบัด (LFK) จะใช้เครื่องจำลองซึ่งจะทำการเคลื่อนไหวแบบสั่นของส่วนต่าง ๆ ของร่างกายมนุษย์ ใช้ใน การบำบัดด้วยเครื่องกล -รูปแบบของการบำบัดด้วยการออกกำลังกาย หนึ่งในภารกิจคือการทำแบบฝึกหัดซ้ำเป็นจังหวะเพื่อการฝึกหรือฟื้นฟูความคล่องตัวในข้อต่อบนอุปกรณ์ประเภทลูกตุ้ม พื้นฐานของอุปกรณ์เหล่านี้คือการปรับสมดุล (จาก fr. บาลานเซอร์- แกว่ง, สมดุล) ลูกตุ้มซึ่งเป็นคันโยกสองแขนที่ทำการเคลื่อนไหวแบบสั่น (โยก) รอบแกนคงที่
1.7. แนวคิดและสูตรพื้นฐาน
 ความต่อเนื่องของตาราง
ความต่อเนื่องของตาราง
 ความต่อเนื่องของตาราง
ความต่อเนื่องของตาราง
 ท้ายโต๊ะ
ท้ายโต๊ะ
 1.8. งาน
1.8. งาน
1. ยกตัวอย่างระบบออสซิลเลเตอร์ในมนุษย์
2. ในผู้ใหญ่ หัวใจจะหดตัว 70 ครั้งต่อนาที กำหนด: ก) ความถี่ของการหดตัว; b) จำนวนการตัดใน 50 ปี
ตอบ:ก) 1.17 Hz; ข) 1.84x10 9 .
3. ลูกตุ้มคณิตศาสตร์ต้องมีความยาวเท่าใดจึงจะมีระยะเวลาการแกว่งเท่ากับ 1 วินาที
 4.
แท่งไม้เรียวตรงบางยาว 1 ม. ถูกแขวนไว้ที่ปลายบนแกน กำหนด: ก) ช่วงเวลาของการแกว่ง (เล็ก) คืออะไร? b) ลูกตุ้มคณิตศาสตร์ที่มีคาบการแกว่งเท่ากันจะมีความยาวเท่าใด
4.
แท่งไม้เรียวตรงบางยาว 1 ม. ถูกแขวนไว้ที่ปลายบนแกน กำหนด: ก) ช่วงเวลาของการแกว่ง (เล็ก) คืออะไร? b) ลูกตุ้มคณิตศาสตร์ที่มีคาบการแกว่งเท่ากันจะมีความยาวเท่าใด
 5.
วัตถุที่มีมวล 1 กิโลกรัมจะแกว่งตามกฎ x = 0.42 cos (7.40t) โดยที่ t วัดเป็นวินาที และ x มีหน่วยเป็นเมตร ค้นหา: ก) แอมพลิจูด; ข) ความถี่; c) พลังงานทั้งหมด d) พลังงานจลน์และพลังงานศักย์ที่ x = 0.16 ม.
5.
วัตถุที่มีมวล 1 กิโลกรัมจะแกว่งตามกฎ x = 0.42 cos (7.40t) โดยที่ t วัดเป็นวินาที และ x มีหน่วยเป็นเมตร ค้นหา: ก) แอมพลิจูด; ข) ความถี่; c) พลังงานทั้งหมด d) พลังงานจลน์และพลังงานศักย์ที่ x = 0.16 ม.
 6.
ประเมินความเร็วที่คนเดินด้วยความยาวก้าว l= 0.65 ม. ความยาวขา L = 0.8 ม.; จุดศูนย์ถ่วงอยู่ที่ระยะ H = 0.5 ม. จากเท้า สำหรับโมเมนต์ความเฉื่อยของขาเทียบกับข้อต่อสะโพก ให้ใช้สูตร I = 0.2mL 2 .
6.
ประเมินความเร็วที่คนเดินด้วยความยาวก้าว l= 0.65 ม. ความยาวขา L = 0.8 ม.; จุดศูนย์ถ่วงอยู่ที่ระยะ H = 0.5 ม. จากเท้า สำหรับโมเมนต์ความเฉื่อยของขาเทียบกับข้อต่อสะโพก ให้ใช้สูตร I = 0.2mL 2 .
 7.
คุณจะทราบมวลของวัตถุขนาดเล็กบนสถานีอวกาศได้อย่างไรถ้าคุณมีนาฬิกา สปริง และชุดตุ้มน้ำหนักพร้อมใช้
7.
คุณจะทราบมวลของวัตถุขนาดเล็กบนสถานีอวกาศได้อย่างไรถ้าคุณมีนาฬิกา สปริง และชุดตุ้มน้ำหนักพร้อมใช้
 8.
แอมพลิจูดของการสั่นแบบแดมเปอร์ลดลงใน 10 ออสซิลเลชัน 1/10 ของค่าเดิม ระยะเวลาการสั่น T = 0.4 วิ หาค่าการลดค่าลอการิทึมและตัวประกอบการหน่วง
8.
แอมพลิจูดของการสั่นแบบแดมเปอร์ลดลงใน 10 ออสซิลเลชัน 1/10 ของค่าเดิม ระยะเวลาการสั่น T = 0.4 วิ หาค่าการลดค่าลอการิทึมและตัวประกอบการหน่วง
บทนำ………………………………………………………………..
- ประเภทและลักษณะของการสั่นสะเทือน
- การสั่นสะเทือนทางกล…………………………………………….
- การสั่นของคลื่นแม่เหล็กไฟฟ้า………………………..
วรรณกรรม……………………………………………………………………..
บทนำ.
การสั่นสะเทือนเป็นหนึ่งในกระบวนการที่พบบ่อยที่สุดในธรรมชาติและเทคโนโลยี อาคารสูงและสายไฟฟ้าแรงสูงสั่นภายใต้อิทธิพลของลม ลูกตุ้มนาฬิกาไขลาน และรถบนสปริงขณะเคลื่อนที่ ระดับแม่น้ำในระหว่างปี และอุณหภูมิของร่างกายมนุษย์ในช่วงเจ็บป่วย
เสียงคือความผันผวนของความหนาแน่นและความดันของอากาศ คลื่นวิทยุคือการเปลี่ยนแปลงความแรงของสนามไฟฟ้าและสนามแม่เหล็กเป็นระยะ แสงที่มองเห็นได้ก็คือการสั่นของคลื่นแม่เหล็กไฟฟ้า โดยมีความยาวคลื่นและความถี่ต่างกันเล็กน้อยเท่านั้น แผ่นดินไหว - การสั่นสะเทือนของดิน กระแสน้ำ - การเปลี่ยนแปลงในระดับของทะเลและมหาสมุทร เกิดจากการดึงดูดของดวงจันทร์และสูงถึง 18 เมตรในบางพื้นที่ ชีพจรเต้น - การหดตัวของกล้ามเนื้อหัวใจของมนุษย์เป็นระยะ เป็นต้น เปลี่ยนความตื่นตัวและการนอนหลับ การทำงานและการพักผ่อน ฤดูหนาวและฤดูร้อน...
แม้แต่ทุกวันที่เราไปทำงานและกลับบ้านก็ยังอยู่ภายใต้คำจำกัดความของความผันผวนซึ่งถูกตีความว่าเป็นกระบวนการที่ทำซ้ำทุกประการหรือประมาณเป็นระยะอย่างสม่ำเสมอ
การสั่นสะเทือนเป็นลักษณะทางกล แม่เหล็กไฟฟ้า เคมี อุณหพลศาสตร์ และอื่นๆ แม้จะมีความหลากหลายนี้ แต่ก็มีความเหมือนกันมาก จึงอธิบายได้ด้วยสมการอนุพันธ์เดียวกัน ส่วนพิเศษของฟิสิกส์ - ทฤษฎีการสั่น - เกี่ยวข้องกับการศึกษากฎของปรากฏการณ์เหล่านี้ ผู้ต่อเรือและผู้สร้างเครื่องบิน ผู้เชี่ยวชาญด้านอุตสาหกรรมและการขนส่ง ผู้สร้างวิศวกรรมวิทยุและอุปกรณ์เสียงจำเป็นต้องรู้
ความผันผวนใด ๆ มีลักษณะแอมพลิจูด - ส่วนเบี่ยงเบนที่ใหญ่ที่สุดของค่าหนึ่งจากค่าศูนย์ระยะเวลา ( ตู่) หรือความถี่ ( วี). ปริมาณสองค่าสุดท้ายเชื่อมต่อกันด้วยความสัมพันธ์ตามสัดส่วนผกผัน: ตู่= 1/วี. ความถี่การสั่นแสดงเป็นเฮิรตซ์ (Hz) หน่วยวัดตั้งชื่อตามนักฟิสิกส์ชาวเยอรมันชื่อ Heinrich Hertz (1857-1894) 1 Hz คือการสั่นหนึ่งครั้งต่อวินาที นี่คืออัตราที่หัวใจมนุษย์เต้น คำว่า "เฮิรตซ์" ในภาษาเยอรมันหมายถึง "หัวใจ" หากต้องการ ความบังเอิญนี้ถือได้ว่าเป็นการเชื่อมต่อเชิงสัญลักษณ์
นักวิทยาศาสตร์กลุ่มแรกที่ศึกษาการสั่น ได้แก่ กาลิเลโอ กาลิเลอี (1564...1642) และคริสเตียน ฮอยเกนส์ (1629...1692) กาลิเลโอได้ก่อตั้ง isochronism (ความเป็นอิสระของช่วงเวลาจากแอมพลิจูด) ของการแกว่งเล็กๆ เฝ้าดูการแกว่งของโคมระย้าในมหาวิหารและวัดเวลาโดยจังหวะของชีพจรในมือของเขา Huygens ประดิษฐ์นาฬิกาลูกตุ้มเครื่องแรก (1657) และในฉบับที่สองของเอกสาร "นาฬิกาลูกตุ้ม" (1673) ของเขาได้ตรวจสอบปัญหาจำนวนหนึ่งที่เกี่ยวข้องกับการเคลื่อนที่ของลูกตุ้ม โดยเฉพาะอย่างยิ่ง พบศูนย์กลางการแกว่งของลูกตุ้มกายภาพ
นักวิทยาศาสตร์หลายคนมีส่วนร่วมอย่างมากในการศึกษาการแกว่ง: อังกฤษ - ว. วชิรทอมสัน (ลอร์ดเคลวิน) และJ. Rayleigh , รัสเซีย - A.S. Popov และ P.N. Lebedev, โซเวียต - A.N. ครีลอฟ, แอล.ไอ. Mandelstam, ND Papaleksi, N.N. Bogolyubov, เอเอ Andronov และอื่น ๆ
1. ประเภทของความผันผวนและลักษณะเฉพาะ
ออสซิลเลเตอร์ กระบวนการ (การสั่น) เรียกว่าการเคลื่อนไหวหรือการเปลี่ยนแปลงในสถานะซึ่งมีการทำซ้ำในระดับหนึ่ง
การสั่นเรียกว่าเป็นคาบถ้าค่าของปริมาณทางกายภาพที่เปลี่ยนแปลงในกระบวนการของการแกว่งนั้นซ้ำกันในช่วงเวลาปกติ T เรียกว่าคาบ
ขึ้นอยู่กับลักษณะทางกายภาพและกลไกการกระตุ้นการแกว่ง ได้แก่:
- การสั่นสะเทือนทางกล (การสั่นสะเทือนของลูกตุ้ม, เครื่องสาย, คาน, ชิ้นส่วนของเครื่องจักรและกลไก, การหมุนของเรือ, คลื่นของทะเล, ความผันผวนของแรงดันในระหว่างการแพร่ขยายของเสียงในก๊าซ, ของเหลว, ของแข็ง, ฯลฯ );
- การสั่นของคลื่นแม่เหล็กไฟฟ้า (กระแสสลับ, ความผันผวนของกระแส, ประจุ, เวกเตอร์ อีและ ชมในวงจรออสซิลเลเตอร์ ฯลฯ );
- การสั่นสะเทือนทางไฟฟ้า(การสั่นของเมมเบรนโทรศัพท์ ดิฟฟิวเซอร์ของลำโพงอิเล็กโทรไดนามิก ฯลฯ)
การเคลื่อนที่แบบสั่นแตกต่างจากการเคลื่อนไหวประเภทอื่น มีคุณลักษณะทั่วไปบางประการ ในภาษาของทฤษฎีการสั่น ความแตกต่างระหว่างการเคลื่อนที่แบบสั่นของร่างกายและกระบวนการในวงจรแม่เหล็กไฟฟ้าแบบสั่นจะหายไปหากเราเข้าใกล้พวกมันจากมุมมองของหลักการทั่วไป วิธีนี้เรียกว่าการเปรียบเทียบแบบเครื่องกลไฟฟ้า
ระบบที่สั่นเรียกว่าระบบสั่น
การสั่นที่เกิดขึ้นจากการเบี่ยงเบนเริ่มต้นของระบบจากสมดุลที่เสถียรนั้นเรียกว่าการสั่นตามธรรมชาติ
การสั่นที่เกิดขึ้นในระบบภายใต้อิทธิพลของอิทธิพลภายนอกแบบแปรผันเรียกว่าการสั่นแบบบังคับ
ลักษณะทั่วไปและแนวคิดทั่วไปของระบบออสซิลเลเตอร์ต่างๆ มีดังนี้:
- สมการเชิงอนุพันธ์ (รูปแบบจะเหมือนกันสำหรับระบบสั่น)
- สมการการสั่น
- แอมพลิจูด;
- ความถี่หรือระยะเวลาของการแกว่ง
- เฟส;
- ระยะเริ่มต้น
ลองพิจารณาความผันผวนในระบบเครื่องกลและแม่เหล็กไฟฟ้า โดยเน้นที่คุณลักษณะที่ระบุไว้ข้างต้น
1.1 การสั่นสะเทือนทางกล
ขึ้นอยู่กับลักษณะของผลกระทบต่อระบบการสั่น การแกว่งอิสระ การบังคับการสั่น การสั่นในตัวเอง และการสั่นแบบพาราเมตริกจะแตกต่างกัน
การสั่นแบบอิสระคือสิ่งที่เกิดขึ้นในระบบที่ปล่อยทิ้งไว้ให้ตัวเองหลังจากที่ได้รับแรงกดหรือถูกดึงออกจากสมดุล ตัวอย่างคือการแกว่งของลูกบอลที่ห้อยอยู่บนเส้นด้าย (ลูกตุ้ม) ในการที่จะทำให้เกิดการสั่นสะท้าน คุณสามารถผลักลูกบอลหรือเอาข้าง ๆ แล้วปล่อยออก
การสั่นแบบบังคับเรียกว่าการสั่นดังกล่าว ในระหว่างที่ระบบการสั่นได้รับแรงที่เปลี่ยนแปลงเป็นระยะจากภายนอก ตัวอย่างคือการสั่นสะเทือนของสะพานที่เกิดขึ้นเมื่อคนเดินข้ามสะพาน
การสั่นในตัวเองเช่นเดียวกับการสั่นแบบบังคับนั้นมาพร้อมกับอิทธิพลของแรงภายนอกที่มีต่อระบบการสั่นอย่างไรก็ตามช่วงเวลาของเวลาที่อิทธิพลเหล่านี้ถูกกำหนดโดยระบบสั่นเอง - ระบบเองควบคุมอิทธิพลภายนอก . ตัวอย่างของระบบการสั่นในตัวเองคือนาฬิกาที่ลูกตุ้มรับแรงกระแทกจากพลังงานของน้ำหนักที่เพิ่มขึ้นหรือสปริงบิดเบี้ยว และการกระแทกเหล่านี้จะเกิดขึ้นในช่วงเวลาที่ลูกตุ้มเคลื่อนผ่านตำแหน่งตรงกลาง ด้วยการแกว่งของพารามิเตอร์เนื่องจากอิทธิพลภายนอก การเปลี่ยนแปลงเป็นระยะในพารามิเตอร์บางอย่างของระบบเกิดขึ้น เช่น ความยาวของเกลียวที่ลูกบอลถูกแขวนไว้ ทำให้เกิดการสั่น
ที่ง่ายที่สุดคือการสั่นฮาร์มอนิกเช่น การสั่นดังกล่าวซึ่งค่าการสั่น (เช่น ส่วนเบี่ยงเบนของลูกตุ้ม) เปลี่ยนแปลงตามเวลาตามกฎของไซน์หรือโคไซน์ การสั่นประเภทนี้มีความสำคัญอย่างยิ่งด้วยเหตุผลดังต่อไปนี้ ประการแรก การสั่นในธรรมชาติและเทคโนโลยีมักมีลักษณะที่ใกล้เคียงกับฮาร์มอนิกมาก และประการที่สอง กระบวนการเป็นระยะของรูปแบบที่แตกต่างกัน (โดยขึ้นอยู่กับเวลาต่างกัน) สามารถแสดงเป็นการซ้อนทับได้ การสั่นสะเทือนแบบฮาร์มอนิกหลายแบบ
ในฐานะที่เป็นระบบการสั่นแบบเครื่องกล ตามตัวอย่างที่เราจะพิจารณาการสั่น เราเลือก ลูกตุ้มสปริง: วัตถุขนาดเล็ก (จุดวัสดุ) มวล m แขวนอยู่บนสปริงที่มีความแข็ง k (รูปที่ 2)
สปริงที่ไม่ได้บรรจุมีความยาว ล. 0 . เมื่อร่างกายถูกระงับ สปริงยาวขึ้นโดย ∆l แรงยืดหยุ่นที่ได้จะทำให้เกิดความสมดุลของแรงโน้มถ่วง อัตราส่วนนี้ทำให้เรากำหนด ตำแหน่งสมดุลของลูกตุ้มสปริง. หากตอนนี้ร่างกายเคลื่อนที่โดยสัมพันธ์กับตำแหน่งสมดุลด้วยระยะทาง x แรงยืดหยุ่นและแรงโน้มถ่วงจะกระทำต่อร่างกาย
ผลลัพธ์ของแรงเหล่านี้คือ:
เครื่องหมายลบ หมายถึง ทิศทางของแรง F เช่น และทิศทางการกระจัด x อยู่ตรงข้าม เอฟ อดีต - แรงยืดหยุ่นที่เกิดขึ้นเมื่อร่างกายเคลื่อนตัวสัมพันธ์กับตำแหน่งสมดุลอันเนื่องมาจากการกดทับหรือความตึงของสปริง (ขึ้นอยู่กับด้านที่ร่างกายเบี่ยงเบนไปจากตำแหน่งสมดุล) ในเชิงคุณภาพ รูปที่ 1.1 แสดงผลของการกระทำของแรงยืดหยุ่น
รูปที่ 1.1 - ตำแหน่งของลูกตุ้มสปริงในช่วงหนึ่งของการแกว่ง
หากระบบสั่นภายใต้การกระทำของกองกำลังที่พัฒนาในระบบการสั่นโดยไม่มีอิทธิพลจากภายนอกและโดยไม่คำนึงถึงแรงต้านทาน การแกว่งจะถูกเรียก แรงสั่นสะเทือนตามธรรมชาติ.
การไม่มีการสั่นสะเทือนเป็นคุณลักษณะของระบบออสซิลเลชันในอุดมคติ ซึ่งก็คือ แบบจำลองทางกายภาพกระบวนการทางกายภาพที่แท้จริง
สมการเชิงอนุพันธ์ซึ่งสอดคล้องกับการแกว่งของลูกตุ้มสปริงสามารถหาได้จากกฎการเคลื่อนที่ซึ่งเป็นกฎข้อที่ 2 ของนิวตัน หม่า = F.
โดยพิจารณาว่าความเร่งเป็นอนุพันธ์อันดับสองของการกระจัดเทียบกับเวลา
,
และแรงที่กระทำต่อร่างกายนั้นเป็นแรงยืดหยุ่นซึ่งกำหนดไว้สำหรับการกระจัดเล็กน้อยของร่างกายจากตำแหน่งสมดุลตามกฎของฮุคตามที่เราได้รับ
หรือ
.
นี่คือ สมการอนุพันธ์อันดับสองสำหรับการสั่นแบบไม่แดมป์ ลักษณะเด่นหลักคือความจริงที่ว่าอนุพันธ์อันดับสองของการกระจัดเทียบกับเวลา (เช่น ความเร่ง) เป็นสัดส่วนกับการกระจัด สมการเชิงอนุพันธ์ซึ่งค่าของ x รวมอยู่ในค่าศูนย์หรือยกกำลังแรกเรียกว่า เชิงเส้นสมการเชิงอนุพันธ์. ต่อไปนี้ เราจะแสดงให้เห็นว่าสมการประเภทนี้เป็นคุณลักษณะของการแกว่งตัวแบบไม่แปลงสัญญาณในระบบออสซิลเลชันในอุดมคติใดๆ
เราย้ายเงื่อนไขทั้งหมดของสมการไปทางด้านซ้ายและนำสมการอนุพันธ์มาอยู่ในรูปแบบ:
ค่า แสดงว่าเราได้
คำตอบของสมการอนุพันธ์ประเภทนี้คือสมการ:
หรือ
วิธีแก้ปัญหาเหล่านี้เรียกว่า สมการการสั่นทำให้สามารถคำนวณการกระจัด x ของลูกตุ้มสปริงได้ตลอดเวลา
การสั่นซึ่งปริมาณทางกายภาพที่กำหนดลักษณะการเปลี่ยนแปลงตามกฎของไซน์หรือโคไซน์เรียกว่า ฮาร์โมนิก.
ความแตกต่างระหว่างอาร์กิวเมนต์ของฟังก์ชันไซน์และโคไซน์คือ .
ต่อไปนี้ เรามักจะใช้คำตอบของสมการอนุพันธ์ในรูปแบบ
ในสมการการสั่น:
แต่ - แอมพลิจูดการกระจัดคือค่าเบี่ยงเบนสูงสุดของลูกตุ้มจากตำแหน่งสมดุล
เอ็กซ์ - อคติลูกตุ้มเช่น การเบี่ยงเบนของจุดสั่น (ร่างกาย) จากตำแหน่งสมดุล ณ เวลา t;
– ระยะการสั่น- ค่าที่กำหนดตำแหน่งของจุดสั่นเมื่อใดก็ได้ เสื้อ;
α – ระยะเริ่มต้นกำหนดตำแหน่งของลูกตุ้มในเวลาเริ่มต้น (t = 0)
ระยะเวลา T คือช่วงเวลาที่สั้นที่สุดที่ระบบจะกลับสู่ตำแหน่งเดิม ในช่วงระยะเวลาของการสั่น ระบบจะทำการสั่นที่สมบูรณ์หนึ่งครั้ง
ความถี่การแกว่งเป็นระยะเรียกว่าค่าเท่ากับจำนวนการแกว่งต่อหน่วยเวลา
ความถี่วัฏจักรหรือวงกลมการแกว่งเป็นระยะเรียกว่าค่าเท่ากับจำนวนการแกว่งที่เกิดขึ้นต่อหน่วยเวลา
สำหรับลูกตุ้มสปริง ความถี่และคาบของการแกว่งตามธรรมชาติ ขึ้นอยู่กับพารามิเตอร์ของระบบ มีรูปแบบดังนี้
, .
เมื่อทราบสมการการกระจัดของลูกตุ้มสปริง เราจะได้สมการที่คล้ายกันสำหรับปริมาณทางกายภาพอื่นๆ ให้หาความเร็ว ความเร่ง พลังงานสั่นสะเทือน ถ้าสมการการกระจัดของลูกตุ้มสปริงให้อยู่ในรูป
ความเร็วการแกว่งของลูกตุ้มเป็นอนุพันธ์ครั้งแรกของการกระจัด:
คำอธิบายสั้น
การสั่นสะเทือนเป็นหนึ่งในกระบวนการที่พบบ่อยที่สุดในธรรมชาติและเทคโนโลยี อาคารสูงและสายไฟฟ้าแรงสูงสั่นภายใต้อิทธิพลของลม ลูกตุ้มนาฬิกาไขลาน และรถบนสปริงขณะเคลื่อนที่ ระดับแม่น้ำในระหว่างปี และอุณหภูมิของร่างกายมนุษย์ในช่วงเจ็บป่วย
การสั่นสะเทือนทางกล…………………………………………….
การสั่นของคลื่นแม่เหล็กไฟฟ้า………………………..
วรรณกรรม…………………………………………………………………..
ความผันผวน- สิ่งเหล่านี้คือการเคลื่อนไหวหรือกระบวนการที่ทำซ้ำอย่างแน่นอนหรือประมาณในช่วงเวลาหนึ่ง
การสั่นของกลไก -ความผันผวนของปริมาณทางกล (การกระจัด ความเร็ว ความเร่ง ความดัน ฯลฯ)
การสั่นสะเทือนทางกล (ขึ้นอยู่กับลักษณะของแรง) ได้แก่
ฟรี;
บังคับ;
ตัวเองสั่น
ฟรีเรียกว่า การสั่นสะเทือนที่เกิดขึ้นเมื่อกระทำเพียงครั้งเดียวของแรงภายนอก (ข้อความเริ่มต้นของพลังงาน) และในกรณีที่ไม่มีอิทธิพลภายนอกต่อระบบออสซิลเลเตอร์
ฟรี (หรือเป็นเจ้าของ)- นี่คือการสั่นในระบบภายใต้การกระทำของแรงภายใน หลังจากที่ระบบถูกนำออกจากสมดุล (ในสภาพจริง การแกว่งอิสระจะถูกหน่วงเสมอ)
เงื่อนไขการเกิดการแกว่งอิสระ
1. ระบบออสซิลเลเตอร์ต้องมีตำแหน่งสมดุลที่มั่นคง
2. เมื่อนำระบบออกจากสมดุล แรงลัพธ์ต้องเกิดขึ้นซึ่งทำให้ระบบกลับสู่ตำแหน่งเดิม
3. แรงเสียดทาน (ความต้านทาน) มีขนาดเล็กมาก
แรงสั่นสะเทือน- ความผันผวนที่เกิดขึ้นภายใต้อิทธิพลของแรงภายนอกที่เปลี่ยนแปลงไปตามกาลเวลา
ตัวเองสั่น- การสั่นแบบไม่มีแดมป์ในระบบ รองรับโดยแหล่งพลังงานภายในในกรณีที่ไม่มีแรงแปรผันจากภายนอก
ความถี่และแอมพลิจูดของการสั่นในตัวเองนั้นพิจารณาจากคุณสมบัติของระบบสั่นเอง
การสั่นในตัวเองแตกต่างจากการแกว่งอิสระตรงที่แอมพลิจูดไม่ขึ้นกับเวลาและการกระทำเริ่มต้นที่กระตุ้นกระบวนการของการแกว่ง
ระบบสั่นในตัวเองประกอบด้วย: ระบบสั่น; แหล่งพลังงาน; อุปกรณ์ป้อนกลับที่ควบคุมการไหลของพลังงานจากแหล่งพลังงานภายในสู่ระบบออสซิลเลเตอร์
พลังงานที่มาจากแหล่งกำเนิดในช่วงเวลาหนึ่งเท่ากับพลังงานที่สูญเสียไปโดยระบบออสซิลเลเตอร์ในเวลาเดียวกัน
การสั่นสะเทือนทางกลแบ่งออกเป็น:
ซีดจาง;
ไม่ติดขัด
ลดแรงสั่นสะเทือน- ความผันผวนพลังงานที่ลดลงตามเวลา
ลักษณะของการเคลื่อนที่แบบสั่น:
ถาวร:
แอมพลิจูด (A)
ระยะเวลา (T)
ความถี่()
ค่าเบี่ยงเบนสูงสุด (ในค่าสัมบูรณ์) ของร่างกายที่สั่นจากตำแหน่งสมดุลเรียกว่า แอมพลิจูดการสั่นสะเทือนโดยทั่วไป แอมพลิจูดจะแสดงด้วยตัวอักษร A
ช่วงเวลาที่ร่างกายสั่นอย่างสมบูรณ์หนึ่งครั้งเรียกว่า ระยะเวลาของการแกว่ง
ระยะเวลาของการแกว่งมักจะแสดงด้วยตัวอักษร T และใน SI วัดเป็นวินาที (s)
จำนวนการแกว่งต่อหน่วยเวลาเรียกว่า ความถี่การสั่น.
ความถี่แสดงด้วยตัวอักษร v (“nu”) หน่วยของความถี่คือการสั่นหนึ่งครั้งต่อวินาที หน่วยนี้มีชื่อว่าเฮิรตซ์ (Hz) เพื่อเป็นเกียรติแก่นักวิทยาศาสตร์ชาวเยอรมัน ไฮน์ริช เฮิรตซ์
คาบการสั่น T และความถี่การสั่น v สัมพันธ์กันโดยความสัมพันธ์ต่อไปนี้:
T=1/ หรือ =1/T.
ความถี่วัฏจักร (วงกลม) ωคือจำนวนการแกว่งใน 2π วินาที
การสั่นสะเทือนฮาร์มอนิก- การสั่นสะเทือนทางกลที่เกิดขึ้นภายใต้การกระทำของแรงที่เป็นสัดส่วนกับการกระจัดและพุ่งตรงข้ามกับแรงนั้น. การสั่นสะเทือนฮาร์มอนิกเกิดขึ้นตามกฎของไซน์หรือโคไซน์
ให้จุดวัสดุทำการสั่นแบบฮาร์มอนิก
สมการของการสั่นฮาร์มอนิกมีรูปแบบ:

a - ความเร่ง V - ความเร็ว q - ประจุ A - แอมพลิจูด t - เวลา
(หรือ แรงสั่นสะเทือนตามธรรมชาติ) คือการสั่นสะเทือนของระบบออสซิลเลเตอร์ ซึ่งเกิดขึ้นเนื่องจากพลังงานที่รายงานในขั้นต้น (ศักยภาพหรือจลนศาสตร์) ที่รายงานในขั้นต้นเท่านั้นในกรณีที่ไม่มีอิทธิพลจากภายนอก
พลังงานศักย์หรือพลังงานจลน์สามารถสื่อสารได้ ตัวอย่างเช่น ในระบบทางกลผ่านการกระจัดเริ่มต้นหรือความเร็วเริ่มต้น
ร่างกายที่แกว่งไปมาอย่างอิสระมักมีปฏิสัมพันธ์กับร่างกายอื่น ๆ และร่วมกับพวกเขาในรูปแบบระบบของร่างกายที่เรียกว่า ระบบสั่น.
ตัวอย่างเช่น สปริง ลูกบอล และเสาแนวตั้งซึ่งติดกับปลายด้านบนของสปริง (ดูรูปด้านล่าง) จะรวมอยู่ในระบบออสซิลเลเตอร์ ที่นี่ลูกบอลจะเลื่อนไปตามสายอย่างอิสระ (แรงเสียดทานมีน้อยมาก) ถ้าเอาลูกไปทางขวาแล้วปล่อยไปเองก็จะแกว่งไปมาอย่างอิสระรอบตำแหน่งสมดุล (จุด อู๋) เนื่องจากการกระทำของแรงยืดหยุ่นของสปริงมุ่งไปที่ตำแหน่งสมดุล
อีกตัวอย่างคลาสสิกของระบบออสซิลเลเตอร์เชิงกลคือลูกตุ้มทางคณิตศาสตร์ (ดูรูปด้านล่าง) ในกรณีนี้ ลูกบอลจะแกว่งอย่างอิสระภายใต้การกระทำของสองแรง: แรงโน้มถ่วงและแรงยืดหยุ่นของเกลียว (โลกยังเข้าสู่ระบบการแกว่งด้วย) ผลลัพธ์ของพวกเขาถูกนำไปยังตำแหน่งสมดุล

แรงที่กระทำต่อร่างกายของระบบออสซิลเลเตอร์เรียกว่า กองกำลังภายใน. กองกำลังภายนอกเรียกว่าแรงที่กระทำต่อระบบจากวัตถุที่ไม่รวมอยู่ในระบบ จากมุมมองนี้ การสั่นอิสระสามารถกำหนดได้ว่าเป็นการสั่นในระบบภายใต้การกระทำของแรงภายในหลังจากที่ระบบออกจากสมดุล
เงื่อนไขสำหรับการเกิดขึ้นของการแกว่งอิสระคือ:
1) การเกิดขึ้นของแรงในตัวมันที่ทำให้ระบบกลับสู่ตำแหน่งสมดุลที่มั่นคงหลังจากที่มันถูกนำออกจากสถานะนี้แล้ว
2) ไม่มีแรงเสียดทานในระบบ
ไดนามิกของการแกว่งอิสระ
การสั่นสะเทือนของร่างกายภายใต้การกระทำของแรงยืดหยุ่น. สมการการเคลื่อนที่แบบสั่นของร่างกายภายใต้การกระทำของแรงยืดหยุ่น F() สามารถหาได้โดยพิจารณาจากกฎข้อที่สองของนิวตัน ( F = หม่า) และกฎของฮุก ( การควบคุม F = -kx), ที่ไหน มคือ มวลของลูกบอล และเป็นความเร่งที่ลูกบอลได้มาภายใต้การกระทำของแรงยืดหยุ่น k- ค่าสัมประสิทธิ์ความแข็งของสปริง Xคือ การกระจัดของร่างกายจากตำแหน่งสมดุล (สมการทั้งสองเขียนเป็นเส้นโครงบนแกนนอน โอ้). เท่ากับด้านขวาของสมการเหล่านี้และคำนึงถึงความเร่ง เอเป็นอนุพันธ์อันดับสองของพิกัด X(ออฟเซ็ต) เราได้รับ:
 .
.
ในทำนองเดียวกัน นิพจน์สำหรับการเร่งความเร็ว เอเราได้รับโดยการสร้างความแตกต่าง ( v = -v m บาป ω 0 t = -v m x m cos (ω 0 t + π/2)):
a \u003d -a m cos ω 0 t,
ที่ไหน m = ω 2 0 x mคือ แอมพลิจูดความเร่ง ดังนั้นแอมพลิจูดของความเร็วของการสั่นฮาร์มอนิกจึงเป็นสัดส่วนกับความถี่ และแอมพลิจูดความเร่งจะเป็นสัดส่วนกับกำลังสองของความถี่การสั่น