สนามแรงเหวี่ยงของเครื่องทำความเย็นกระแสน้ำวน ระเบิด. เครื่องยนต์เทราท์และเรือดำน้ำชีวภาพ
สมการพื้นฐานของอิเล็กโตรไดนามิกส์ด้วยกล้องจุลทรรศน์แบบคลาสสิกที่อธิบายปรากฏการณ์แม่เหล็กไฟฟ้าในตัวกลางใดๆ (รวมถึงสุญญากาศ) ได้มาในช่วงทศวรรษที่ 60 ศตวรรษที่ 19 โดย J. Maxwell ตามลักษณะทั่วไปของกฎเชิงประจักษ์ของปรากฏการณ์ทางไฟฟ้าและแม่เหล็กและการพัฒนาแนวคิดของนักวิทยาศาสตร์ชาวอังกฤษ M. Faraday ว่าปฏิสัมพันธ์ระหว่างวัตถุที่มีประจุไฟฟ้าจะดำเนินการโดยใช้สนามแม่เหล็กไฟฟ้า (ปรากฏการณ์การเหนี่ยวนำแม่เหล็กไฟฟ้า) แมกซ์เวลล์เสนอสมการที่เชื่อมโยงปรากฏการณ์ทางไฟฟ้าและแม่เหล็กเข้าด้วยกัน และทำนายการมีอยู่ของคลื่นแม่เหล็กไฟฟ้า ทฤษฎีของแมกซ์เวลล์เผยให้เห็นธรรมชาติแม่เหล็กไฟฟ้าของแสง ทฤษฎีของแมกซ์เวลล์เป็นแบบมหภาค เนื่องจากพิจารณาสนามที่สร้างขึ้นโดยประจุและกระแสขนาดใหญ่ที่กระจุกตัวอยู่ในปริมาตรที่ใหญ่กว่าปริมาตรของอะตอมและโมเลกุลแต่ละตัวมาก
ทฤษฎีสนามแม่เหล็กไฟฟ้าของแมกซ์เวลล์เชื่อมโยงปริมาณที่แสดงลักษณะเฉพาะของสนามแม่เหล็กไฟฟ้ากับแหล่งกำเนิด กล่าวคือ การกระจายในอวกาศของประจุไฟฟ้าและกระแสน้ำ เวกเตอร์ , , และสนามแม่เหล็กไฟฟ้าในตัวกลางที่ต่อเนื่องกันเชื่อฟัง สมการการเชื่อมต่อ ซึ่งกำหนดโดยคุณสมบัติของสิ่งแวดล้อม นี่คือเวกเตอร์ความแรงของสนามไฟฟ้า เวกเตอร์การกระจัดไฟฟ้า เวกเตอร์การเหนี่ยวนำแม่เหล็ก เป็นเวกเตอร์ความแรงของสนามแม่เหล็ก เวกเตอร์เหล่านี้สำหรับสนามไฟฟ้าและสนามแม่เหล็กคงที่ได้รับการพิจารณาก่อนหน้านี้เช่นใน
สนามแม่เหล็กไฟฟ้าเป็นไปตามหลักการทับซ้อนเช่น ฟิลด์แบบเต็มของแหล่งที่มาหลายรายการคือผลรวมเวกเตอร์ของฟิลด์ที่สร้างโดยแหล่งที่มาแต่ละรายการ
พิจารณาปรากฏการณ์การเหนี่ยวนำแม่เหล็กไฟฟ้า จากกฎของฟาราเดย์
ε ใน = - ∂ Fม. /∂ t (3.1)
มันตามมาว่าการเปลี่ยนแปลงใด ๆ ในฟลักซ์ของการเหนี่ยวนำแม่เหล็กควบคู่ไปกับวงจรนำไปสู่การเกิดขึ้นของแรงเคลื่อนไฟฟ้าของการเหนี่ยวนำและการปรากฏตัวของกระแสอุปนัยเป็นผล แมกซ์เวลล์ตั้งสมมติฐานว่าสนามแม่เหล็กไฟฟ้ากระแสสลับใดๆ กระตุ้นสนามไฟฟ้ากระแสสลับในพื้นที่โดยรอบ ซึ่งเป็นสาเหตุของกระแสเหนี่ยวนำในวงจร ตามความคิดของแมกซ์เวลล์ วงจรการนำไฟฟ้าซึ่งมีแรงเคลื่อนไฟฟ้าปรากฏขึ้น มีบทบาทรอง เป็นเพียงตัวบ่งชี้ที่ตรวจพบฟิลด์นี้
คำถามที่ 2. สมการแรกของ Maxwell ในรูปแบบอินทิกรัล
สมการแรกของแมกซ์เวลล์คือกฎการเหนี่ยวนำ
ฟาราเดย์ ตามคำจำกัดความ แรงเคลื่อนไฟฟ้า เท่ากับการหมุนเวียนของเวกเตอร์ความแรงของสนามไฟฟ้า:
![]() , (3.2) ซึ่งเท่ากับศูนย์สำหรับสนามที่มีศักยภาพ ในกรณีทั่วไปของสนามกระแสน้ำวนที่เปลี่ยนแปลงไปสำหรับ ε ในเราได้รับ
, (3.2) ซึ่งเท่ากับศูนย์สำหรับสนามที่มีศักยภาพ ในกรณีทั่วไปของสนามกระแสน้ำวนที่เปลี่ยนแปลงไปสำหรับ ε ในเราได้รับ
นิพจน์ (3.3) - สมการแรกของ Maxwell: การหมุนเวียนของเวกเตอร์ความแรงของสนามไฟฟ้าตามเส้นชั้นความสูงที่ปิดโดยพลการ L เท่ากับอัตราการเปลี่ยนแปลงของฟลักซ์ของเวกเตอร์การเหนี่ยวนำแม่เหล็กผ่านพื้นผิวที่ล้อมรอบด้วยเส้นชั้นความสูงนี้ ถ่ายด้วยเครื่องหมายตรงข้าม เครื่องหมาย "-" สอดคล้องกับกฎ Lenz สำหรับทิศทางของกระแสเหนี่ยวนำ ดังนั้นจึงเป็นไปตามนั้น สนามแม่เหล็กไฟฟ้ากระแสสลับ สร้างในอวกาศ สนามไฟฟ้ากระแสน้ำวน ไม่ว่าตัวนำจะอยู่ในสนามนี้ (วงจรปิด) หรือไม่ก็ตาม สมการ (3.3) ที่ได้จึงเป็นลักษณะทั่วไปของสมการ (3.2) ซึ่งใช้ได้เฉพาะกับสนามที่มีศักยภาพเท่านั้น กล่าวคือ สนามไฟฟ้าสถิต
การเกิดขึ้นของสนามไฟฟ้ากระแสน้ำวนในอวกาศภายใต้การกระทำของสนามแม่เหล็กไฟฟ้ากระแสสลับถูกนำมาใช้เช่นในหม้อแปลงไฟฟ้าเช่นเดียวกับในเครื่องเร่งอิเล็กตรอนแบบเหนี่ยวนำ - เบตาตรอน
สนามแม่เหล็กไฟฟ้ากระแสสลับที่เกิดขึ้นในขดลวดปฐมภูมิของหม้อแปลงไฟฟ้าเมื่อกระแสไฟฟ้าสลับผ่านจะแทรกซึมเข้าไปในขดลวดทุติยภูมิและทำให้เกิดแรงเคลื่อนไฟฟ้ากระแสสลับของการเหนี่ยวนำในนั้น
ในสนามแม่เหล็กไฟฟ้ากระแสสลับที่สร้างโดยแม่เหล็กไฟฟ้าที่มีชิ้นขั้วรูปกรวยในห้องเร่งความเร็วสุญญากาศในรูปแบบของวงแหวนปิด สนามไฟฟ้ากระแสน้ำวนจะถูกสร้างขึ้น เส้นความเข้มของสนามไฟฟ้ากระแสน้ำวนมีรูปแบบของวงกลมที่มีศูนย์กลาง ในกรณีนี้ รูปร่างพิเศษของชิ้นขั้วจะสร้างการกระจายในแนวรัศมีของสนามแม่เหล็ก ซึ่งการเหนี่ยวนำแม่เหล็กจะลดลงจากแกนไปยังขอบของวงโคจร สิ่งนี้ทำให้มั่นใจถึงความเสถียรของวงโคจรของอิเล็กตรอน อิเล็กตรอนในห้องเร่งความเร็วเคลื่อนที่ไปตามวิถีวงกลมและถูกเร่งให้เป็นพลังงานที่สำคัญระหว่างการเคลื่อนที่ของวงโคจรซ้ำ
เจ้าของสิทธิบัตร RU 2364969:
การประดิษฐ์นี้เกี่ยวข้องกับฟิสิกส์ของสนามแม่เหล็ก เพื่อให้ได้สนามแม่เหล็กกระแสน้ำวนเป็นจังหวะเดียวที่สร้างสนามแม่เหล็กที่ดึงไปตามเส้นรอบวงโดยสัมพันธ์กับวัตถุแม่เหล็กเฟอร์โรแมกเนติกที่เคลื่อนที่อยู่ในนั้น วิธีหนึ่งในการสร้างสนามแม่เหล็กกระแสน้ำวนตามวงกลมหนึ่งๆ เทียบเท่ากับการหมุนของสนามแม่เหล็กคือ แม่เหล็กถาวรหลายตัวถูกวางอย่างสมมาตรสัมพันธ์กับวงกลม แกนแม่เหล็กตามยาวของแม่เหล็กถาวรจะอยู่ในแนวเดียวกับเส้นสัมผัสของวงกลมดังกล่าว ณ จุดที่อยู่สมมาตรบนวงกลมนี้ พบจำนวน n ของแม่เหล็กถาวรจากเงื่อนไข 2π/n≤ΔΘ โดยที่มุม ΔΘ=อาร์คคอส พารามิเตอร์ γ=d/R และ d คือระยะห่างจากจุดตัดของแกนแม่เหล็กตามยาวของแม่เหล็กถาวร ด้วยระนาบขั้วของพวกมันไปยังวงกลมที่กำหนดของรัศมี R ฟังก์ชันแรงของแม่เหล็กคงที่ D และพารามิเตอร์ γ ถูกเลือกเพื่อให้โมเมนต์เบรกที่สร้างโดยแม่เหล็กตัวก่อนหน้าได้รับการชดเชยบางส่วนหรือทั้งหมดโดยโมเมนต์เร่งความเร็วของแม่เหล็กที่ตามมาใน ทิศทางของสนามแม่เหล็กกระแสน้ำวน ค่า D=µ 0 µνS 2 H 0 2 /8π 2 R 5 โดยที่ µ 0 = 1.256.10 -6 Gn/m คือการซึมผ่านของแม่เหล็กแบบสัมบูรณ์ของสุญญากาศ µ คือค่าการซึมผ่านของแม่เหล็กสัมพัทธ์ของตัวเฟอร์โรแมกเนติกของปริมาตร ν ซึ่งทำปฏิกิริยากับสนามแม่เหล็กที่มีความแรงเท่ากับ H 0 ในระนาบของขั้วแม่เหล็กถาวรที่มีส่วนตัดขวางของขั้ว S. ผลลัพธ์ทางเทคนิคประกอบด้วยการเคลื่อนที่แบบหมุนของวัตถุแม่เหล็กซึ่งก็คือ ในการรับพลังงานกล (ไฟฟ้า) จากโครงสร้างแบบคงที่ของสนามแม่เหล็ก 6 ป่วย
การประดิษฐ์นี้เกี่ยวข้องกับฟิสิกส์ของสนามแม่เหล็ก โดยเฉพาะอย่างยิ่งวิธีการเพื่อให้ได้การกำหนดค่าสนามแม่เหล็กในรูปแบบของสนามกระแสน้ำวนที่เต้นเป็นจังหวะทางเดียวที่สร้างสนามแม่เหล็กที่ดึงไปรอบ ๆ เส้นรอบวงโดยสัมพันธ์กับวัตถุแม่เหล็กเฟอร์โรแมกเนติก (นอกรีต) ที่เคลื่อนที่อยู่ในนั้น
เป็นที่ทราบกันดีอยู่แล้วว่าความแรงของสนามแม่เหล็กตามแกนตามยาวของแม่เหล็กเป็นสองเท่าของทิศตั้งฉากกับแกนแม่เหล็กตามยาว การกระจายความแรงของสนามแม่เหล็กภายในทรงกลม ซึ่งจุดศูนย์กลางตรงกับจุดตัดของระนาบของขั้วแม่เหล็กของแม่เหล็กเกือกม้ากับแกนแม่เหล็กตามยาว กำหนดโดยรูปแบบทิศทาง เช่น ใน รูปแบบของการปฏิวัติที่สัมพันธ์กับแกนแม่เหล็กตามยาวโดยรูปร่างของ cardioid ที่กำหนดโดยนิพจน์:
โดยที่ α คือมุมเบี่ยงเบนของเวกเตอร์รัศมีถึงจุดที่กำหนดบนทรงกลมจากทิศทางที่ประจวบกับแกนแม่เหล็กตามยาว ดังนั้น สำหรับ α=0 เรามี ξ(0)=1 สำหรับ α=π/2 เราได้ ξ(π/2)=0.5 ซึ่งสอดคล้องกับข้อมูลทางกายภาพที่ทราบ สำหรับแม่เหล็กเกือกม้าที่มี α=π ค่า ξ(π)=0 สำหรับแม่เหล็กตรง รูปแบบการแผ่รังสีจะแสดงด้วยวงรีของการปฏิวัติ ซึ่งกึ่งแกนหลักซึ่งมีขนาดใหญ่เป็นสองเท่าของกึ่งแกนรอง และเกิดขึ้นพร้อมกันกับแกนแม่เหล็กตามยาว
เป็นที่ทราบกันว่าแรงบิดที่ส่งไปยังโรเตอร์ของมอเตอร์ AC แบบซิงโครนัสหรือแบบอะซิงโครนัสจากสเตเตอร์นั้นเกิดจากสนามแม่เหล็กที่หมุนได้ ซึ่งเป็นเวกเตอร์ที่หมุนสัมพันธ์กับแกนโรเตอร์ตามฟังก์ชันของเวลา ในกรณีนี้ สนามแม่เหล็กดังกล่าวจะกำหนดกระบวนการไดนามิกของการโต้ตอบกับโรเตอร์
ไม่มีวิธีใดที่เป็นที่รู้จักในการสร้างสนามแม่เหล็กกระแสน้ำวนโดยการสังเคราะห์สนามแม่เหล็กสถิตที่สร้างขึ้นโดยการผสมผสานของแม่เหล็กถาวรที่ไม่สามารถเคลื่อนที่ได้ ดังนั้นจึงไม่ทราบความคล้ายคลึงของโซลูชันทางเทคนิคที่อ้างสิทธิ์
จุดมุ่งหมายของการประดิษฐ์นี้เป็นวิธีการในการสร้างสนามแม่เหล็กกระแสน้ำวนโดยที่ตัวเฟอร์โรแมกเนติกจะสัมผัสกับการกระทำของแรงกระตุ้นทางเดียวที่ทำให้วัตถุดังกล่าวมีการเคลื่อนที่แบบหมุน กล่าวคือ ได้การกำหนดค่าแบบคงที่ของสนามแม่เหล็ก (จาก แม่เหล็กถาวรแบบอยู่กับที่) ซึ่งมีผลเทียบเท่ากับสนามแม่เหล็กหมุน
เป้าหมายนี้สำเร็จได้ด้วยวิธีการสร้างสนามแม่เหล็กน้ำวนที่อ้างสิทธิ์ ซึ่งประกอบด้วยแม่เหล็กถาวรหลายตัวที่จัดเรียงแบบสมมาตรสัมพันธ์กับวงกลม แกนแม่เหล็กตามยาวของแม่เหล็กถาวรจะเรียงชิดกันกับแทนเจนต์ของวงกลมที่ระบุใน จุดที่อยู่สมมาตรบนวงกลมนี้ และพบจำนวน n ของแม่เหล็กถาวรจากเงื่อนไข 2π/n≤ΔΘ โดยที่มุม ΔΘ=arccos พารามิเตอร์ γ=d/R และ d คือระยะห่างจากจุดต่างๆ จุดตัดของแกนแม่เหล็กตามยาวของแม่เหล็กถาวรกับระนาบขั้วของพวกมันไปยังวงกลมที่ระบุของรัศมี R ฟังก์ชันแรงของแม่เหล็กถาวร D และพารามิเตอร์ γ เลือกเพื่อให้โมเมนต์เบรกที่สร้างโดยแม่เหล็กก่อนหน้าได้รับการชดเชยบางส่วนหรือทั้งหมด โดยโมเมนต์เร่งของแม่เหล็กที่ตามมาในทิศทางของสนามแม่เหล็กกระแสน้ำวนและค่า D=µ 0 µνS 2 N 0 2 /8π 2 R 5 , โดยที่ µ 0 = 1.256.10 -6 H /m - แม่เหล็กสัมบูรณ์ การซึมผ่านของสุญญากาศ µ - การซึมผ่านของแม่เหล็กสัมพัทธ์ของตัวเฟอร์โรแมกเนติก o ปริมาตร ν ซึ่งทำปฏิกิริยากับสนามแม่เหล็กซึ่งมีกำลังเท่ากับ H 0 ในระนาบของขั้วแม่เหล็กถาวรที่มีส่วนตัดขวางของขั้ว S
ความสำเร็จของเป้าหมายของการประดิษฐ์ในวิธีการที่อ้างสิทธิ์นั้นอธิบายโดยการใช้โครงสร้างเป็นระยะของสนามแม่เหล็กรอบ ๆ วงกลมหนึ่งซึ่งมีทิศทางของแกนแม่เหล็กตามยาวของแม่เหล็กถาวรที่มีเครื่องหมายเดียวกันตามแนวสัมผัสของวงกลมนี้ ซึ่งสนามแม่เหล็กกระแสน้ำวนเกิดขึ้นเนื่องจากความแตกต่างของความแรงของสนามแม่เหล็กตลอดแนวแกนแม่เหล็กตามยาวของแม่เหล็กถาวร ซึ่งกำหนดโดยรูปแบบทิศทางของความเข้ม ξ(α) ของสนามแม่เหล็กตาม (1) เพื่อให้แน่ใจว่าโมเมนตัมของโมเมนตัมในทิศทางของสนามแม่เหล็กกระแสน้ำวนที่ส่งไปยังตัวเฟอร์โรแมกเนติกนั้นเกินโมเมนตัมของโมเมนตัมในทิศทางตรงกันข้าม
โครงสร้างของอุปกรณ์ที่ใช้วิธีการที่เสนอแสดงในรูปที่ 1 ตัวเลือกที่เป็นไปได้สำหรับการเคลื่อนที่ของวัตถุที่เป็นเฟอร์โรแมกเนติกในสนามแม่เหล็กของหนึ่งใน n แม่เหล็กถาวรนั้นแสดงไว้ในรูปที่ 2 สำหรับค่าต่าง ๆ ของโหลดและแรงเสียดทานบนแกนของการหมุนของตัวนอกรีตที่มีตัวเฟอร์โรแมกเนติก รูปที่ 3 แสดงกราฟที่กระทำจากแม่เหล็กถาวร n ตัวที่ขับเคลื่อนร่างกายของเฟอร์โรแมกเนติกของแรงนอกรีต โดยคำนึงถึงการกระจายของพวกมันตามมุมการหมุนของส่วนนอกรีตภายในวงกลม รูปที่ 4 แสดงกราฟการสะสมของแรงกระตุ้นนอกรีตจากการกระทำของแม่เหล็กถาวรทั้ง n ตัวสำหรับการหมุนรอบที่สมบูรณ์แต่ละครั้ง โดยไม่คำนึงถึงโมเมนต์ความเสียดทานและภาระที่ติดอยู่ ซึ่งแสดงเป็นแรงบิดเฉลี่ยที่กระทำการอย่างถาวรในส่วนนอกรีต รูปที่ 5 แสดงกราฟกำลัง - จากแรงบิดที่เกิดจากสนามแม่เหล็กกระแสน้ำวนและจากโมเมนต์การสูญเสีย - ตามหน้าที่ของความเร็วการหมุนของความผิดปกติ รูปที่ 6 แสดงไดอะแกรมของอุปกรณ์ที่ได้รับการดัดแปลงซึ่งช่วยลดการสูญเสียความเสียดทานในแกนของการหมุนได้อย่างมากเนื่องจากสมดุลไดนามิกของโรเตอร์หมุน แทนที่จะเป็นนอกรีต
ในรูปที่ 1 อุปกรณ์ที่ใช้วิธีการประกอบด้วย:
1 - ตัวเฟอร์โรแมกเนติกที่มีมวล m, ปริมาตร ν ที่มีการซึมผ่านของแม่เหล็กสัมพัทธ์ µ,
2 - คันโยกยาว R สำหรับยึดตัวเฟอร์โรแมกเนติกของพิสดาร
3 - แกนหมุนของนอกรีต
4-15 - แม่เหล็กถาวรที่ติดตั้งเอียงเท่ากันกับวงกลมของรัศมี R และหนึ่งในขั้วที่หันไปทางนั้น (เช่น ขั้วใต้ s) จุดตัดของระนาบซึ่งแกนแม่เหล็กตามยาวจะถูกลบออกจาก วงกลมที่ระบุ (วิถีการหมุนของตัวเฟอร์โรแมกเนติก 1) ที่ระยะทาง ง .
ตัวเฟอร์โรแมกเนติก 1 พร้อมคันโยก 2 แสดงในรูปที่ 1 ในตำแหน่งเชิงมุม β สัมพันธ์กับแกน X C. ในรูปแบบที่นำเสนอ 12 พารามิเตอร์ D ที่เหมือนกันและแม่เหล็กถาวรที่มีความลาดเอียงเท่ากันถูกใช้โดยวางสมมาตรสัมพันธ์กับวงกลมที่ระบุผ่าน มุม ΔΘ=2π/12=30°
รูปที่ 2 แสดงกราฟการเคลื่อนที่ของวัตถุแม่เหล็ก 1 ตัวที่สัมพันธ์กับแม่เหล็กถาวรตัวใดตัวหนึ่ง 4-15 ในช่วงเวลาต่างๆ ของแรงเสียดทานและภาระที่ติดอยู่ที่แกนของการหมุน 3 ให้แนวคิดเชิงคุณภาพของกระบวนการปฏิสัมพันธ์
กราฟบน - โหลดบนแกนของการหมุนมีขนาดเล็กมาก (กระบวนการสั่นด้วยระยะห่างเริ่มต้นสูงสุดของตัว ferromagnetic จากขั้วแม่เหล็ก ค่าเบี่ยงเบนสุดท้ายในตำแหน่งของตัว ferromagnetic เกือบเป็นศูนย์)
กราฟกลาง - โหลดบนแกนของการหมุนมีขนาดใหญ่ (กระบวนการถูกทำให้หมาด ๆ เป็นระยะ ๆ โดยมีระยะห่างเริ่มต้นขั้นต่ำของตัว ferromagnetic จากขั้วแม่เหล็ก ส่วนเบี่ยงเบนสุดท้ายเป็นค่าบวก ไม่ถึงตำแหน่งของขั้วแม่เหล็ก)
กราฟด้านล่าง - โหลดบนแกนของการหมุนนั้นเหมาะสมที่สุด (กระบวนการคือ oscillatory-aperiodic ชุบด้วยการสั่นครึ่งรอบที่ระยะเริ่มต้นของวัตถุ ferromagnetic จากขั้วแม่เหล็กมากกว่ากราฟกลาง ส่วนเบี่ยงเบนสุดท้าย เป็นลบผ่านตำแหน่งของขั้วแม่เหล็กถาวร)
รูปที่ 3 แสดงกราฟสิบสองกราฟที่กระจายอย่างสมมาตรรอบๆ เส้นรอบวงของแรงที่ขับเคลื่อนความเยื้องศูนย์ในช่องว่างเชิงมุมที่สอดคล้องกันด้วยขนาด ΔΘ จะเห็นได้ว่าค่าสูงสุดของฟังก์ชันเหล่านี้มีค่ามากกว่าค่าสัมบูรณ์ของค่าต่ำสุดอย่างมีนัยสำคัญ ซึ่งสัมพันธ์กับการกำหนดค่าของรูปแบบการแผ่รังสี ξ(α) แม่เหล็กถาวรรูปเกือกม้า (รูปที่ 1 เพื่อความสะดวกในการวาดภาพแสดงค่าคงที่ แม่เหล็กรูปสี่เหลี่ยมผืนผ้า) โดยเฉพาะอย่างยิ่งสิ่งนี้ช่วยให้สามารถเลือกหมายเลข n ของแม่เหล็กถาวรได้อย่างเหมาะสม พารามิเตอร์ γ และค่าของ D ซึ่งกำหนดความแรงของสนามแม่เหล็ก H 0 ในระนาบของขั้วแม่เหล็กถึง ให้การชดเชยบางส่วนหรือทั้งหมดสำหรับแรงเบรกของแม่เหล็กถาวรก่อนหน้าโดยแรงเร่งจากนอกรีตที่ตามมาในทิศทางของการหมุนแม่เหล็กถาวร
รูปที่ 4 แสดงกราฟของการกระทำร่วมของแม่เหล็กถาวรทั้งหมดที่ใช้ในอุปกรณ์ ส่งผลให้มีแรงบิดเฉลี่ยที่ทำหน้าที่ในแนวนอกรีตอย่างต่อเนื่อง
รูปที่ 5 แสดงกราฟสองกราฟ - กราฟของกำลังที่มีประโยชน์ซึ่งสร้างขึ้นจากความผิดปกติ และกราฟของกำลังที่ใช้ในการเอาชนะแรงเสียดทานและภาระที่ติดอยู่ - ตามฟังก์ชันของความเร็วในการหมุนของตัวนอกรีต จุดตัดของกราฟเหล่านี้จะกำหนดค่าของความเร็วในการหมุนคงที่ในอุปกรณ์ เมื่อโหลดเพิ่มขึ้น เส้นโค้งการสูญเสียพลังงานจะเพิ่มขึ้นในมุมกว้างเมื่อเทียบกับแกน abscissa ซึ่งสอดคล้องกับการเลื่อนของจุดตัดที่ระบุของกราฟกำลังไปทางซ้าย กล่าวคือ จะทำให้ค่าคงที่ลดลง -ค่าสถานะ N SET ของความเร็วในการหมุนของพิสดาร
รูปที่ 6 แสดงรูปแบบที่เป็นไปได้อย่างใดอย่างหนึ่งสำหรับการใช้งานอุปกรณ์ ซึ่งโรเตอร์ถูกสร้างขึ้นในรูปแบบของโครงสร้างที่สมดุลแบบไดนามิก ตัวอย่างเช่น ตามวัตถุแม่เหล็กสามตัวที่ตั้งอยู่ในมุม 120° ที่ระยะทางเท่ากัน R จาก แกนของการหมุนและมีมวลเท่ากันซึ่งไม่สร้างเมื่อโรเตอร์หมุน, ภาระการสั่นสะเทือนบนแกนของการหมุน, เช่นในกรณีของนอกรีตในรูปที่ 1, เนื่องจากการกระทำของแรงสู่ศูนย์กลาง (หลังในดังกล่าว โรเตอร์สมดุลกัน) นอกจากนี้ การเพิ่มจำนวนของวัตถุที่เป็นเฟอร์โรแมกเนติกทำให้กำลังไฟฟ้าที่มีประโยชน์ในอุปกรณ์เพิ่มขึ้นตามสัดส่วนของจำนวนวัตถุแม่เหล็กเฟอร์โรแมกเนติกดังกล่าว จำนวนของแม่เหล็กถาวรที่ใช้ในภาพวาดนี้ลดลงเพื่อทำให้การวาดภาพง่ายขึ้น อันที่จริงตัวเลขนี้ถูกเลือกตามสูตร n=hr+1 โดยที่ h คือจำนวนของวัตถุที่เป็นเหล็กในโรเตอร์ p=0, 1, 2, 3, ... เป็นจำนวนเต็มซึ่งจะชัดเจน จากคำอธิบายต่อไปนี้
ลองพิจารณาสาระสำคัญในการดำเนินงานของวิธีการที่เสนอโดยพิจารณาจากการทำงานของอุปกรณ์ที่ใช้งานดังแสดงในรูปที่ 1
โดยคำนึงถึงรูปร่างของรูปแบบการแผ่รังสี ξ(α) ของความแรงของสนามแม่เหล็ก H(α) สามารถเข้าใจได้ว่าในระยะทางเท่ากันจากจุดตัดของเส้น AO ที่มีวงกลมรัศมี R ถึงสิ่งนี้ จุดและหลังจากนั้น ความแรงของสนามแม่เหล็กจะแตกต่างกัน กล่าวคือ เมื่อถึงจุดนี้ตามการหมุนของตัวเฟอร์โรแมกเนติก ความแรงของสนามแม่เหล็กจะสูงกว่าหลังจากจุดนี้ ดังนั้น แรงดึงดูดของแม่เหล็กที่พิจารณาจะมากกว่าแรงเบรก ดังที่เห็นได้จากรูปที่ 3 สำหรับแม่เหล็กถาวรทั้ง n ตัว สิ่งนี้นำไปสู่การสะสมของโมเมนตัมเชิงมุมระหว่างการหมุนของส่วนนอกรีตและการสื่อสารของการเคลื่อนที่ของการหมุนรอบสุดท้ายอย่างไม่มีกำหนดหากแรงบิดที่เกิดขึ้น (รูปที่ 4) เกินโมเมนต์ของแรงเสียดทาน (และโหลดที่แนบมา)
โดยเฉพาะอย่างยิ่ง ให้พิจารณาปฏิกิริยาระหว่างวัตถุแม่เหล็กเฟอร์โรแมกเนติก 1 กับแม่เหล็กถาวร 5 (รูปที่ 1) แม่เหล็กถาวรนี้ตั้งอยู่โดยให้แกนแม่เหล็กตามยาวประจวบกับแทนเจนต์ AB กับวงกลมรัศมี R ที่จุด B จุด A อยู่บนระนาบของขั้วแม่เหล็กและเป็นจุดตัดของระนาบนี้กับแกนแม่เหล็กตามยาว เอบี. ระยะทาง OA=R+d นั่นคือ จุด A อยู่ที่ระยะ d จากวงกลมนี้ ตามที่ระบุไว้สำหรับแม่เหล็กถาวร 7 แสดงถึงอัตราส่วน γ=d/R ผ่านพารามิเตอร์ไร้มิติ γ ค่าของเซ็กเมนต์ AB คือ พบจากนิพจน์ r 0 =AB= R(2γ+γ 2) 1/2 . มุม ΔΘ=2π/n กำหนดช่วงเชิงมุมในการจัดเรียงของแม่เหล็กถาวรอย่างสมมาตรเมื่อเทียบกับวงกลมนี้ และตำแหน่งเชิงมุมของแม่เหล็กถาวรที่สอดคล้องกันซึ่งนับจากแกน X ของระบบพิกัด เท่ากับ Θ i = 2πi/n โดยที่ i=1, 2, 3, ... 12. ตำแหน่งเชิงมุมชั่วขณะของวัตถุแม่เหล็กเฟอร์โรแมกเนติก 1 ที่มีคันโยก 2 จะแสดงด้วย β และตำแหน่งเชิงมุมของจุด B บนวงกลมสัมพันธ์กับ แกน X จะแสดงเป็น β 0i (สำหรับแม่เหล็กถาวร 5 จุด B อยู่บนแกน X ดังนั้นมุม β 01 =0) สำหรับแม่เหล็กถาวร 6 มุม β 02 =ΔΘ สำหรับแม่เหล็กถาวร 7 β 03 =2ΔΘ ฯลฯ และสำหรับแม่เหล็กถาวร 4 β 012 =11ΔΘ มุม β 0i และ Θ i สัมพันธ์กันโดยผลต่างคงที่ Θ i -β 0i = arccos โดยการแปลงอย่างง่าย จะพบระยะห่างจากจุดศูนย์กลางของตัวแม่เหล็กเฟอร์โรแมกเนติกไปยังจุด A บนขั้วของแม่เหล็กถาวร 5 (ในกรณีทั่วไปของแม่เหล็กถาวรตัวที่ i) จากนิพจน์:
สำหรับช่วง 0≤β≤2π สำหรับแม่เหล็กถาวร 5 ค่า Θ 1 จะถูกเลือกให้เป็น ΔΘ มุม α ระหว่างแกนแม่เหล็กตามยาว AB ของแม่เหล็กถาวร 5 และเส้นตรงระหว่างจุดศูนย์กลางของตัวเฟอร์โรแมกเนติก 1 และจุด A จากนิพจน์:
โดยใช้ฟังก์ชันตรีโกณมิติผกผัน α=arcos Q. โปรดทราบว่าในรูปที่ 1 มุม α>π/2 นั่นคือ ตัวเฟอร์โรเมติกส์อยู่ในสนามแม่เหล็กหน่วงของแม่เหล็กถาวร 5 และในสนามแม่เหล็กเร่งความเร็วของ แม่เหล็กถาวร 6.
แทนค่า α ที่พบใน (3) เป็นนิพจน์ (1) เราได้รับความสัมพันธ์สำหรับไดอะแกรม ξ(α):
ความแรงของสนามแม่เหล็ก ณ จุดที่โครงแม่เหล็กเฟอร์โรแมกเนติกสัมพันธ์กับขั้วแม่เหล็กถูกกำหนดโดยระยะทาง r(β) ตาม (2) และเมื่อคำนึงถึง (4) จะเท่ากับ:
และแรงดึงดูด F M (β) ของวัตถุเฟอร์โรแมกเนติกโดยแม่เหล็กถาวรถูกกำหนดเป็น:
โดยที่ D=µ 0 µνS 2 Н 0 2 /8π 2 R 5 ตามที่กล่าวไว้ข้างต้น
เวกเตอร์ของแรงแม่เหล็ก F M (β) ซึ่งฉายในมุมฉากกับคันโยกนอกรีต กำหนดแรงขับแม่เหล็กของ F M DV (β) นอกรีต ซึ่งกำหนดดังนี้:
และซึ่งกำหนดแรงบิด M(β)=F M DV (β)R ค่าเฉลี่ยคือ M CP กำหนดโดยการรวมในช่วง0≤β≤2πของแรง F M DV (β) สำหรับแม่เหล็กถาวร n ทั้งหมด รูปแบบที่แสดงในรูปที่ 3 แสดงในรูปที่ 4 โดยไม่คำนึงถึงโมเมนต์ความเสียดทานและโมเมนต์ของโหลดที่แนบมา
กำลังที่มีประโยชน์ P BP =M SR ω โดยที่ ω คือความเร็วเชิงมุมของการหมุนของประหลาด กราฟแสดงในรูปของเส้นตรงเอียงในรูปที่ 5 ดังที่ทราบ แรงเสียดทาน (โหลดที่แนบมา) เป็นสัดส่วนกับความเร็วของการหมุนของประหลาด ดังนั้นการสูญเสียพลังงานจึงแสดงด้วยเส้นโค้งพาราโบลาในรูปที่ 5 ความเร็วของการหมุนนอกรีต N=ω/2π [รอบ/วินาที] เพิ่มขึ้นเป็นค่า N ที่ตั้งไว้ ซึ่งกำลังที่มีประโยชน์และกำลังของการสูญเสียความเสียดทานและโหลดที่เชื่อมต่อจะเท่ากัน นี่แสดงให้เห็นเป็นภาพกราฟิกใน รูปที่ 5 โดยจุดตัดของเส้นเอียงกับพาราโบลา ดังนั้นในโหมดว่าง (นั่นคือเมื่อมีเพียงแรงเสียดทานในแกนของการหมุนเท่านั้นที่กระทำ) ความเร็วเชิงมุมของความเยื้องศูนย์จะสูงสุดและลดลงเมื่อโหลดภายนอกติดกับแกนของการหมุนตามปกติ ตัวอย่างเช่น สำหรับมอเตอร์กระแสตรงที่มีการรวมอนุกรม
การทำงานของอุปกรณ์ที่ใช้วิธีการที่เสนอนั้นขึ้นอยู่กับการจัดโครงสร้างโครงสร้างสนามแม่เหล็กด้วยการวางแนวของแกนแม่เหล็กตามยาวของแม่เหล็กถาวร (หรือแม่เหล็กไฟฟ้า) จากขั้วเดียวกันตามแนวสัมผัสถึงวงกลมซึ่งเป็นวิถีของ การเคลื่อนที่แบบหมุนของตัวเฟอร์โรแมกเนติกในขณะที่สนามแม่เหล็กกระแสน้ำวนดึงตัวเฟอร์โรแมกเนติกไปตามเส้นรอบวงในทิศทางเดียวเกิดขึ้นเนื่องจากความแรงของสนามแม่เหล็กมากเกินไปในทิศทางของแกนแม่เหล็กตามยาวที่สัมพันธ์กับทิศทางเชิงมุมอื่น ๆ ซึ่งก็คือ กำหนดโดยรูปแบบการแผ่รังสี ξ(α) ตามนิพจน์ (1) และ (4)
เพื่อให้เข้าใจถึงกระบวนการของการก่อตัวของสนามแม่เหล็กกระแสน้ำวน ซึ่งเพียงพอสำหรับสนามแม่เหล็กที่หมุนได้ ในโครงสร้างที่คงที่อย่างหมดจดดังกล่าว จำเป็นต้องแสดงให้เห็นว่าวัตถุแม่เหล็กเฟอร์โรแมกเนติกสามารถเคลื่อนที่ได้ด้วยแม่เหล็กถาวรซึ่งติดตั้งอย่างเอียง ทั้งนี้ขึ้นอยู่กับ ตามขนาดของแรงเสียดทานที่กระทำต่อตัวเฟอร์โรแมกเนติก จะถูกขับเคลื่อนหรือในการเคลื่อนที่แบบสั่นด้วยออสซิลเลเตอร์ซึ่งจะหยุดใกล้กับขั้วของแม่เหล็กถาวรที่มีการกระจัดเกือบเป็นศูนย์ของสัญลักษณ์หนึ่งหรืออีกอันที่สัมพันธ์กับจุด A ของแม่เหล็กถาวร ( สำหรับแม่เหล็ก 5 ในรูปที่ 1) หรือจะหยุดก่อนหรือหลังเส้น AO ดังแสดงในแผนภาพตรงกลางและด้านล่างในรูปที่ 2 ด้วยแรงเสียดทานจำนวนมาก ตัวเฟอร์โรแมกเนติกจะหยุดก่อนที่จะถึงเส้น AO (การกระจัดที่เหลือเป็นบวก) สถานการณ์นี้อธิบายได้ง่าย ๆ โดยข้อเท็จจริงที่ว่าแรงขับนอกรีตตามนิพจน์ (7) เป็นสัดส่วนกับ cos(α+β-β 0i) อาร์กิวเมนต์ซึ่งเมื่อร่างกายเฟอร์โรแมกเนติกตั้งอยู่ตรงข้ามจุด A คือ เท่ากับ π/2 เนื่องจาก β=β 0i และ α=π /2 นั่นคือ ด้วยความบังเอิญที่แน่นอนของจุดศูนย์กลางของวัตถุแม่เหล็กเฟอร์โรแม่เหล็กกับเส้น AO แรงแม่เหล็กขับเคลื่อน F M DV (β) เท่ากับศูนย์ และตัวเฟอร์โรแมกเนติกในที่ที่มีการเสียดสีจะไม่สามารถเข้ารับตำแหน่งบนเส้น AO ได้ โดยไม่นับปัจจัยของการเคลื่อนที่ด้วยแรงเฉื่อย แสดงอยู่ในแผนภาพตรงกลางของรูปที่ 2 หากเลือกแรงเสียดทานที่เหมาะสมที่สุด แม่เหล็กเฟอร์โรแมกเนติกจะถูกดึงดูดด้วยแม่เหล็กถาวรอย่างเข้มข้นกว่าที่มันถูกเบรก ดังนั้นศูนย์กลางของบอดี้เฟอร์โรแมกเนติกจะข้ามเส้น AO ด้วยแรงเฉื่อย เช่นเดียวกับในโหมดการสั่นแบบลดแรงตึงด้วยแรงเฉื่อยต่ำ เสียดสีและหยุดด้านหลังเส้น AO (การกระจัดตกค้างเชิงลบ) ซึ่งระบุไว้ในแผนภาพด้านล่างของรูปที่ 2
ข้อโต้แย้งเหล่านี้เกิดขึ้นจากข้อเท็จจริงที่ว่าวัตถุที่เป็นเฟอร์โรแมกเนติกหยุดนิ่งหรือหมุนช้าเล็กน้อย ดังนั้น ด้วยแรงเสียดทานที่ต่ำมาก (ในตลับลูกปืนสมัยใหม่ ค่าสัมประสิทธิ์การเสียดสีสามารถมีค่า ≥0.0005) ระยะห่างระหว่างขั้วแม่เหล็กกับตัวแม่เหล็กที่แม่เหล็กเริ่มตั้งตัววัตถุแม่เหล็กที่มีการเคลื่อนที่จึงค่อนข้างใหญ่ (ในรูปที่ 2 สำหรับแผนภาพด้านบน ระยะทางนี้เท่ากับหนึ่งในแง่สัมพัทธ์) ด้วยแรงเสียดทานสูง ระยะทางที่ระบุจะน้อยที่สุด (ในแผนภาพตรงกลางของรูปที่ 2 เท่ากับ 0.25) และด้วยแรงเสียดทานที่เหมาะสมที่สุด ระยะห่างนี้จึงมากกว่าค่าต่ำสุดที่ระบุ แต่น้อยกว่าค่าสูงสุด (ในแผนภาพด้านล่างของรูปที่ 2 เท่ากับ 0.75) อย่างหลังหมายความว่าด้วยความเสียดทานที่เหมาะสมที่สุด ตัวเฟอร์โรแมกเนติกจะได้รับการเร่งความเร็วที่เพียงพอและทะลุแนว AO ด้วยแรงเฉื่อย เช่นเดียวกับการเคลื่อนที่แบบสั่นที่มีแรงเสียดทานต่ำ แต่หลังจากการสั่นครึ่งช่วง มันก็จะหยุดลง ซึ่งสั้นกว่าเส้น AO อย่างมีนัยสำคัญ ในกรณีนี้ ตัวเฟอร์โรแมกเนติกจะหยุดและหยุดนิ่งต่อไป หากไม่ได้รับผลกระทบจากสนามแม่เหล็กเร่งของแม่เหล็กถาวรตัวถัดไป 6 (รูปที่ 1) เนื่องจากการนำอุปกรณ์ไปใช้งานนั้นเกี่ยวข้องกับข้อความเดียวที่ส่งถึงโมเมนตัมภายนอกของโมเมนตัมนอกรีต กล่าวคือ บังคับให้อุปกรณ์เข้าสู่การเคลื่อนที่แบบหมุน จากนั้นในกรณีของแรงเสียดทานที่เหมาะสม ความเยื้องศูนย์จะเคลื่อนที่โดยแรงเฉื่อย ทุกครั้งที่ได้รับจากด้านข้างของ ลำดับของแม่เหล็กถาวรที่แสดงทิศทางเดียว (ในการตีความแบบบูรณาการ) โมเมนต์ของแรงกระตุ้นซึ่งสนับสนุนการเคลื่อนที่ของความผิดปกติอย่างไม่มีกำหนดในสนามแม่เหล็กน้ำวนที่เกิด
ดังนั้น เมื่ออยู่ด้านหลังเส้น AO ตัวแม่เหล็กเฟอร์โรแมกเนติกจึงสัมผัสได้ถึงแรงดึงดูดของแม่เหล็กถาวรตัวถัดไป 6 ในทิศทางของการหมุนและเคลื่อนที่เข้าหาแม่เหล็กถาวร 7 เป็นต้น กลม. ระบบของแม่เหล็กถาวรถูกสร้างขึ้นในลักษณะที่สนามแม่เหล็กหน่วงของแม่เหล็กถาวรก่อนหน้าถูกระงับบางส่วนหรือทั้งหมดโดยสนามแม่เหล็กเร่งของแม่เหล็กถาวรถัดไป สิ่งนี้ทำได้โดยการเลือกหมายเลข n ของแม่เหล็กถาวรและพารามิเตอร์คงที่ γ เช่นเดียวกับการออกแบบของแม่เหล็กถาวรซึ่งกำหนดโดยค่าคงที่ D ในรูปที่ 3 แรงขับแม่เหล็ก F M DV (β) จะถูกกระจายใน พิสัยของมุม 2π เพื่อไม่ให้มีการชดเชยแรงเบรกโดยแรงเร่ง แม้ว่าค่าสูงสุดของอันหลังจะมากกว่าโมดูลของการเบรกขั้นต่ำประมาณสามเท่า (และไม่ใช่สองเท่า ซึ่งบ่งชี้ถึงการชดเชยบางส่วนที่ระบุ) . หากคุณเพิ่มจำนวน n ของแม่เหล็กถาวร เช่น โดยการเพิ่มรัศมี R หรือลดช่องว่าง d (นั่นคือ ลด γ) คุณสามารถลดอิทธิพลของปัจจัยการเบรกและเพิ่มกำลังที่มีประโยชน์ของอุปกรณ์ได้อย่างมาก
เมื่อวัตถุที่เป็นเฟอร์โรแมกเนติกเคลื่อนที่สัมพันธ์กับกลุ่มของแม่เหล็กถาวร สถานะการหมุนจะถูกป้อนโดยพัลส์การหมุนของสัญลักษณ์เดียวกันจากด้านข้างของลำดับของแม่เหล็กถาวรที่อยู่ตามแนววิถีปิด (วงกลม) ซึ่งนำไปสู่การเคลื่อนที่แบบหมุนอย่างต่อเนื่อง ของตัวเฟอร์โรแมกเนติก ดังที่กล่าวไว้ข้างต้น อุปกรณ์ถูกนำไปใช้งานโดยการกระทำภายนอกครั้งเดียวด้วยความเร็วเชิงมุมเริ่มต้นที่กำหนด จากสถานะอยู่กับที่ อุปกรณ์ไม่สามารถสลับไปใช้โหมดการเคลื่อนที่แบบหมุนได้เองตามธรรมชาติ ซึ่งทำให้อุปกรณ์นี้เป็นเครื่องกำเนิดไฟฟ้าที่มีโหมดกระตุ้นตัวเองอย่างหนัก
การคำนวณที่สอดคล้องกันของอุปกรณ์แม่เหล็กถาวรสิบสองตัว (n=12) ที่มีส่วนตัดขวางของเสา S=8.5.10 -4 ม. 2 , ตัวเฟอร์โรแมกเนติกที่มีน้ำหนัก m=0.8 กก., ปริมาตรของร่างกาย ν=10 -4 ม. 3 และด้วยการซึมผ่านของแม่เหล็กสัมพัทธ์ µ=2200 โดยมีความยาวก้าน R=0.2 ม. และช่องว่าง d=0.03 ม. (γ=0.15) ถูกสร้างขึ้นโดยใช้โปรแกรม Microsoft Excel เมื่อเลือกแม่เหล็กถาวรที่มีความแรงของสนามแม่เหล็กที่ขั้ว H 0 =1 kA/m สำหรับค่า D=10 -4 n ผลลัพธ์ของการคำนวณเหล่านี้แสดงอยู่ในกราฟของรูปที่ 3, 4 และ 5 ในแง่ปริมาณ
ข้อเสียของอุปกรณ์ที่มีโรเตอร์ในรูปแบบของความผิดปกติคือการมีการสั่นสะเทือนที่สำคัญ เพื่อกำจัดมัน ควรใช้โรเตอร์ที่สมดุลแบบไดนามิกจากตัวเฟอร์โรแมกเนติกหลายตัว (h) ที่อยู่ในตำแหน่งสมมาตร ดังที่แสดงในรูปที่ 6 นอกจากนี้ สิ่งนี้นำไปสู่การเพิ่มขึ้นของ h เท่าของกำลังขับ (มีประโยชน์) ของอุปกรณ์ ก่อนหน้านี้ มีการอ้างอิงถึงข้อเท็จจริงที่ว่าจำนวนแม่เหล็กถาวร n ในอุปกรณ์ดังกล่าวควรเท่ากับ n=ph+1 ดังนั้น สำหรับ h=3 จำนวน n สามารถเท่ากับตัวเลข n=4, 7, 10, 13, 16, เป็นต้น สิ่งนี้ช่วยให้คุณลดการสั่นสะเทือนลงอย่างมากจากแรงกระตุ้นที่ได้รับจากโรเตอร์ นอกจากนี้ ตัวเหนี่ยวนำสามารถสร้างขึ้นภายในตัวแม่เหล็กที่เป็นเฟอร์โรแมกเนติก ซึ่งเหนี่ยวนำให้เกิดแรงเคลื่อนไฟฟ้าได้ เนื่องจากการสะกดจิตเป็นระยะและการล้างอำนาจแม่เหล็กของวัตถุที่เป็นเฟอร์โรแมกเนติกในขณะที่พวกมันเคลื่อนที่สัมพันธ์กับระบบแม่เหล็ก เป็นที่น่าสนใจว่าแรงเคลื่อนไฟฟ้าเหล่านี้ มีความถี่การสั่น f=Nn และกลายเป็นเฟสกะจากกัน 120° เช่นเดียวกับในเครื่องกำเนิดสามเฟส สามารถใช้ในวิศวกรรมพลังงานกระแสต่ำเป็นโมดูลที่สร้างกระแสสลับสามเฟสด้วยความถี่ที่เพิ่มขึ้น (ด้วยความถี่ 400 ... 1,000 เฮิร์ตซ์) ตัวอย่างเช่นสำหรับการจ่ายไฟให้ไจโรสโคปในการบินอวกาศอิสระ เอาต์พุตกระแสไฟสามเฟสจากตัวเหนี่ยวนำของตัวเฟอร์โรแมกเนติกนั้นดำเนินการโดยใช้อิเล็กโทรดวงแหวนหุ้มฉนวนที่ติดตั้งแปรงสัมผัส
สุดท้าย ควรสังเกตว่าด้วยการเพิ่มจำนวน n ของแม่เหล็กถาวรเพื่อให้ ΔΘ>2π/n ตามที่ระบุในการอ้างสิทธิ์ (ในรูปที่ 1 ΔΘ=2π/n) โดยมีค่าพารามิเตอร์ γ เพิ่มขึ้นที่สอดคล้องกัน , ความยาวของเซ็กเมนต์ r 0 เพิ่มขึ้นและโซนแรงดึงดูดของตัวเฟอร์โรแมกเนติกนั้นทับซ้อนกันด้วยแม่เหล็กถาวรที่อยู่ติดกันซึ่งทำให้สามารถแก้ผลกระทบของโซนเบรกและเพิ่มพลังของอุปกรณ์ได้
ปรากฏการณ์ของการได้รับสนามแม่เหล็กกระแสน้ำวนจากอุปกรณ์สถิตและไม่สูญเสียคุณสมบัติทางแม่เหล็กของแม่เหล็กถาวรที่ใช้นั้นขัดแย้งกับแนวคิดที่มีอยู่เกี่ยวกับความเป็นไปไม่ได้ที่จะสร้าง "การเคลื่อนที่ถาวร" ดังนั้นนักฟิสิกส์เชิงทฤษฎีที่เกี่ยวข้องกับปัญหาแม่เหล็กจะต้อง เพื่อหาคำอธิบายของปรากฏการณ์นี้ ผู้เขียนได้กำหนดปรากฏการณ์ที่คล้ายกันนี้เมื่อศึกษาการเคลื่อนที่ของวงแหวน ferromagnetic ในโครงสร้างแม่เหล็กแบบคาบที่มีสนามแม่เหล็กอิ่มตัวโดยใช้คุณสมบัติที่ทราบของความหนืดแม่เหล็กของเฟอร์โรแมกเนท ตลอดจนคุณสมบัติของการลดการซึมผ่านของแม่เหล็กสัมพัทธ์ของเฟอร์โรแม่เหล็กในสนามแม่เหล็กอิ่มตัว (เส้นโค้งของ A.G. Stoletov, 2415).
การอนุมัติอุปกรณ์ที่ใช้วิธีการที่เสนอควรมอบความไว้วางใจให้กับ MEPhI (มอสโก) หรือสถาบันของ Russian Academy of Sciences ที่เกี่ยวข้องกับประเด็นการใช้แม่เหล็กและพลังงาน ควรส่งเสริมการจดสิทธิบัตรการประดิษฐ์ในประเทศที่พัฒนาแล้วหลัก
วรรณกรรม
1. Ebert G. หนังสืออ้างอิงสั้น ๆ เกี่ยวกับฟิสิกส์, ทรานส์. กับมัน., เอ็ด. เค.พี. ยาโคฟเลวา เอ็ด 2nd, GIFML, M., 1963, p. 420.
2. O.F. Men'shikh, เอฟเฟกต์เทอร์โมไดนามิกของเฟอร์โรแมกเนติก ใบสมัครเปิดตามลำดับความสำคัญ ลงวันที่ 23.07.2007, M., IAANO.
3. O. F. Men'shikh ลูกตุ้มหนืดแม่เหล็ก RF Patent No. 2291546 ลงวันที่ 20 เมษายน 2548 มหาชน ในวัว ครั้งที่ 1 ลงวันที่ 10.01.2007
4. O. F. Men'shikh, ตัวหมุนหนืดแบบ Ferromagnetically, RF Patent No. 2309527 โดยมีลำดับความสำคัญลงวันที่ 11 พฤษภาคม 2548 สาธารณะ ในวัว ฉบับที่ 30 ลงวันที่ 27 ตุลาคม 2550
5. O. F. Men'shikh, Magnetic rotator หนืด, RF Patent No. 2325754 ที่มีลำดับความสำคัญลงวันที่ 2 ตุลาคม 2549 Public ในวัว ฉบับที่ 15 ลงวันที่ 27 พฤษภาคม 2551
วิธีการสร้างสนามแม่เหล็กกระแสน้ำวนซึ่งประกอบด้วยแม่เหล็กถาวรหลายตัวตั้งอยู่อย่างสมมาตรเมื่อเทียบกับวงกลม แกนแม่เหล็กตามยาวของแม่เหล็กถาวรจะอยู่ในแนวเดียวกับเส้นสัมผัสของวงกลมที่ระบุ ณ จุดที่อยู่สมมาตรบนวงกลมนี้ และจำนวน n ของแม่เหล็กถาวรหาได้จากเงื่อนไข 2π / n ≤ΔΘ โดยที่มุม
ΔΘ=arccos พารามิเตอร์ γ=d/R a d คือระยะห่างจากจุดตัดของแกนแม่เหล็กตามยาวของแม่เหล็กถาวรที่มีระนาบขั้วถึงวงกลมที่กำหนดของรัศมี R ฟังก์ชันแรงของแม่เหล็กถาวร D และ พารามิเตอร์ γ ถูกเลือกเพื่อให้แรงบิดเบรกที่เกิดจากแม่เหล็กถาวรก่อนหน้า ถูกชดเชยบางส่วนหรือทั้งหมดโดยโมเมนต์เร่งของแม่เหล็กถาวรที่ตามมาในทิศทางของสนามแม่เหล็กกระแสน้ำวน และค่า D=µ 0 µνS 2 H 0 2 /8π 2 R 5 โดยที่ µ 0 =1.256 10 -6 H/m คือสุญญากาศการซึมผ่านของแม่เหล็กแบบสัมบูรณ์ µ คือค่าการซึมผ่านของแม่เหล็กสัมพัทธ์ของตัวเฟอร์โรแมกเนติกที่มีปริมาตร ν ซึ่งทำปฏิกิริยากับสนามแม่เหล็กที่มีความแรงเป็น H o ในระนาบของขั้วแม่เหล็กถาวรที่มีหน้าตัดของขั้ว S.
การประดิษฐ์นี้เกี่ยวข้องกับฟิสิกส์ของสนามแม่เหล็ก เพื่อให้ได้สนามแม่เหล็กกระแสน้ำวนแบบจังหวะเดียวที่สร้างสนามแม่เหล็กที่ดึงรอบเส้นรอบวงโดยสัมพันธ์กับวัตถุแม่เหล็กเฟอร์โรแมกเนติกที่เคลื่อนที่อยู่ในนั้น
Bogomolov V.I.
การเลือกโน้ต "ผลิตภัณฑ์สปริง 2011"
คำนำ
ฤดูหนาวผ่านไป ฤดูร้อนมาถึงแล้ว ขอบคุณปาร์ตี้สำหรับสิ่งนี้!
ในช่วง 15 ปีที่ผ่านมา ฉันได้ส่งเสริมแนวคิดเกี่ยวกับความเป็นไปได้พื้นฐานของการออกแบบเครื่องเคลื่อนไหวถาวรประเภทที่สอง นั่นคือ ความเป็นไปได้ที่แท้จริงของการใช้พลังงานฟรีของฮาร์ดแวร์ในการทำงานของพลังธรรมชาติของ สิ่งแวดล้อมของมนุษย์เพื่อความต้องการของผู้บริโภค
เรากำลังพูดถึงพลังธรรมชาติอะไร? ฉันเชี่ยวชาญในการศึกษาความเป็นไปได้ที่มนุษย์จะใช้งานแรงโน้มถ่วงได้ฟรี แรงเหวี่ยงหนีศูนย์ของแรงเฉื่อย และแรงอาร์คิมีดีนที่ "กลับมา" ในสนามแรงโน้มถ่วง ในสนามแรงเหวี่ยงหนีศูนย์กลาง ในสนามแม่เหล็ก และในสนามของแรงไฟฟ้าสถิต
อะไรเป็นที่มาของความกระตือรือร้นไม่รู้จบของฉันและความอุตสาหะหลายปี? ฉันเชื่อว่าโดยธรรมชาติแล้ว แรงทั้งหมดที่เรารู้จักนั้นเป็นผลมาจากการทำงานของ "เครื่องจักร" ตามธรรมชาติ การทำงานของกลไก, สร้างขึ้นโดยธรรมชาติตามหลักสากลเดียว กล่าวคือหลักการของการแลกเปลี่ยนพลังงานอย่างต่อเนื่องในสภาพแวดล้อมเป็นวิธีการ "อัตโนมัติ" การฟื้นฟูสมดุลพลังงานที่ดีที่สุดโดยรวมในกรณีที่มีการละเมิดพารามิเตอร์ในท้องถิ่น " ความหนาแน่นของพลังงานโดยปริมาตร» ในการไล่ระดับในแนวรัศมีของความหนาแน่นของพลังงานของสนามที่รู้จักทั้งหมดเกี่ยวกับพลังงานศักย์ของกองกำลังอนุรักษ์นิยม
สมมุติ : "ตามแผนนี้ แรงธรรมชาติทั้งหมดเกิดขึ้นและรับรู้ในกลไกธรรมชาติของสิ่งแวดล้อม" คุณสมบัติของโครงร่างดังกล่าวกำหนดพลังของการทำงานของเครื่องจักรธรรมชาติดังกล่าวในสถานการณ์เฉพาะ และกำหนดความสามารถของเราในการใช้พลังงานอิสระบางส่วนในฮาร์ดแวร์ เช่น กระบวนการแลกเปลี่ยนพลังงานธรรมชาติ ผ่านผลทางกายภาพของงานเปล่าของกองกำลังอนุรักษ์นิยม
ดังนั้นแหล่งที่มาของความกระตือรือร้นและความเพียรของฉันจึงอยู่ในความเชื่อที่ว่าความรู้ของผู้ประดิษฐ์ "เครื่องจักรเคลื่อนที่ถาวร" ของโครงร่างสากลของโครงสร้างและหลักการทำงานของเครื่องจักรธรรมชาติที่สร้างกองกำลังที่รู้จักของประเภทการโต้ตอบจะช่วยให้เขา เพื่อออกแบบอุปกรณ์และใช้กระบวนการประดิษฐ์เพื่อแจกจ่ายพลังงานใหม่ผ่านระบบเทียมแบบเปิดที่พวกเขาจะพอดีกับระบบการแลกเปลี่ยนพลังงานสากลโดยไม่ใช้ความรุนแรงต่อธรรมชาติ
ฤดูใบไม้ผลินี้ ฉันมีการตีความใหม่ของสมมติฐานข้างต้นในรูปแบบของโครงร่างใหม่ของการตั้งค่าการทดลองเก็งกำไรของฉันสำหรับ "การทดลองที่สำคัญ" เพื่อพิสูจน์สมมติฐานของฉัน.
กฎหมายว่าด้วยการสื่อสารทางเรือบอกอะไรอีกบ้าง?
เป็นเวลาหลายพันปีของการปฏิบัติในการผลิต มนุษยชาติได้ตรวจสอบความจริงต่อไปนี้อย่างน่าเชื่อถือ: กฎแห่งธรรมชาติ “ภาชนะสื่อสาร” เป็นความจริงที่เถียงไม่ได้
ตรรกะของการให้เหตุผลบอกเราเกี่ยวกับกฎธรรมชาติ-ความจริงอื่นใดได้บ้าง โดยอาศัยความจริงอันไม่แปรเปลี่ยนโดยธรรมชาติของกฎแห่งการสื่อสารทางเรือ?
พิจารณาโครงร่าง 1-a, 1-b, 1-c ของการกระทำของแรงธรรมชาติของกฎแห่งการสื่อสารทางเรือ
รูปที่ 1-a แสดงให้เห็นความแตกต่างของกฎหมายว่าด้วยการสื่อสารเรือ โดยที่พื้นที่มหาสมุทรบนดาวเคราะห์ดวงนี้ถือเป็นส่วนหลัง รูปที่ 1-b และ 1-c แสดงความแตกต่างของกฎหมาย "คันโยก Archimedean" ในตัวอย่างของเครื่องชั่งไฮดรอลิก - ภาชนะสื่อสารและเครื่องชั่งแบบคาน
เราได้ข้อสรุปอะไรบ้างจากการพิจารณาและเปรียบเทียบแผนการเหล่านี้
โดยไม่คำนึงถึงความผันผวนของระดับพื้นผิวมหาสมุทรโลกที่เกิดขึ้นแต่อย่างใด (ภายใต้อิทธิพลของกองกำลังต่างๆ: ภูมิอากาศ, แรงเหวี่ยง, การเคลื่อนที่ของเรือ ฯลฯ ) ผลของการทำงานของแรงโน้มถ่วงของโลกในท้ายที่สุดเสมอ กำหนด ระดับคงที่เฉลี่ยของมวลน้ำในมหาสมุทรซึ่งสอดคล้องกับค่าของรัศมีของพื้นผิวสมมูลที่คาดการณ์ไว้ของทรงกลมเช่น ทำเครื่องหมายในระบบอ้างอิงเกี่ยวกับขนาดของการกระทำของแรงโน้มถ่วงของดาวเคราะห์ที่เท่ากันต่อมวลที่เท่ากัน
ความปรารถนาของระดับน้ำในมหาสมุทรที่จะอยู่ในตำแหน่งสมดุลที่มั่นคงบนรัศมีเดียวกันของพื้นผิวศักย์ไฟฟ้าของระบบอ้างอิงเกิดขึ้น อันเป็นผลมาจากความเท่าเทียมกันของการทำงานของกองกำลังฝ่ายตรงข้ามที่เท่าเทียมกันแรงโน้มถ่วงต่อมวลโน้มถ่วงของสสารของเหลวใน "เรือสื่อสาร" ของน้ำทะเล
เราสามารถสรุปที่คล้ายกันเกี่ยวกับความเท่าเทียมกันที่คงที่และต่อเนื่องของการทำงานฟรีที่ดำเนินการของแรงผลลัพธ์ของแรงโน้มถ่วงของโลกบนมวลที่เท่ากันของน้ำหนัก-ไฮดรอลิกและเครื่องชั่งแบบคาน เราสามารถวาดได้ โดยพิจารณาจากความต้องการของคันโยก ตำแหน่งสมดุลที่มั่นคงบนรัศมีเดียวกันของพื้นผิวศักย์ศักย์ไฟฟ้าของกรอบอ้างอิงนี้
รัศมีหนึ่งของพื้นผิวศักย์เท่ากัน "ทรงกลม" สอดคล้องกับพารามิเตอร์บางอย่าง "ความหนาแน่นของพลังงานโดยปริมาตร"ในกระบวนการทำงานนิรันดร์อย่างต่อเนื่องของแรงโน้มถ่วงรวมถึงงานของพวกเขาเกี่ยวกับกระบวนการต่อเนื่องของการสร้างและการรักษาความลาดชันของแรงกดอุทกสถิตเช่นในของเหลวบนโลก
แนวคิดของ "ความหนาแน่นของพลังงาน" - ความหนาแน่นของพลังงานเนื่องจากพลังงานเชิงปริมาตรเฉพาะของการจัดโครงสร้างสสารของดาวเคราะห์ฉันยืมมาจาก V.V. Zuev จากงานของเขา "ความหนาแน่นของพลังงานคุณสมบัติของแร่ธาตุและโครงสร้างพลังงานของโลก" ระบบกลควอนตัม .
พิจารณาในรูปที่ 2-a และ 2-b โครงร่างของการกระทำของแรงธรรมชาติของกฎของอาร์คิมิดีส แรงยกของอาร์คิมีดีนที่กระทำบนทุ่นและเปรียบเทียบกับแบบแผน 1-a และ 1-b
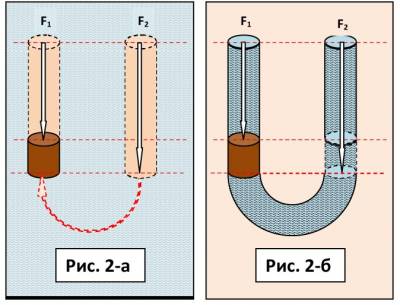
ขอบเขตของพื้นผิวที่เท่ากันนั้นถูกวาดอย่างคาดเดา (ระบบอ้างอิง) ผ่านพื้นผิวด้านล่างและด้านบนของทุ่น ซึ่งสอดคล้องกับเวกเตอร์รัศมีของการกระทำของแรงโน้มถ่วงของดาวเคราะห์ต่อมวลของทุ่นและของเหลว
แรงอาร์คิมีดีนคือแรงลัพธ์Fอา แรงกดสองเท่า ด้านล่างF 2 บนฐานของทุ่นและด้านบนF 1 ไปที่พื้นผิวของทุ่นF A= F 2 – F 1 .แรงดัน F 1 และ F 2 แต่ละตัวเป็นสัดส่วนกับน้ำหนักของของไหล นั่นคือ การทำงานของแรงโน้มถ่วง (F gr ) "แต่ละคอลัมน์สำหรับคอลัมน์ของตัวเอง" ของของเหลว โดย "เสา" เราหมายถึงคอลัมน์ของแรงดันไฮโดรสแตติกที่แสดงในรูป
เราสามารถสรุปอะไรได้โดยการเปรียบเทียบแบบแผน 1-a, 1-b และ 2-a, 2-b
ในรูปที่ 2-b ในU - เรือสื่อสารรูปทรง กฎของอาร์คิมิดีสดำเนินการอย่างเคร่งครัดตามรูปแบบของกลไกการยกกำลังอาร์คิมีดีนที่แสดงในรูปที่ 2-a เมื่อ "เสา" ของมวลของเหลวถูกจารึกไว้อย่างแม่นยำในความจุ ของกิ่งด้านซ้ายและขวาของเรือสื่อสาร โครงการ 2 ทองเหลืองถือเป็นอะนาล็อกของโครงร่างของเครื่องชั่งไฮดรอลิก 1-b และแสดงการปฏิบัติตามกลไกอย่างเต็มที่สำหรับการใช้เอฟเฟกต์ทางกายภาพตามธรรมชาติ "เรือสื่อสาร" และ "การยกกำลังอาร์คิมีดีน"
กฎแห่งการกระทำของแรงยกของอาร์คิมีดีนถือได้ว่าเป็นกรณีพิเศษของกฎหมายว่าด้วยการสื่อสารทางเรือและในทางกลับกัน
ลองถามตัวเราเองอีกคำถามหนึ่ง คำตอบสำหรับผู้ประดิษฐ์ "เครื่องเคลื่อนไหวถาวร" กำหนดโอกาสที่แท้จริงของความอุตสาหะของเขา สิ่งที่เป็น แหล่งพลังงานสำหรับการทำงานของกลไกการทำงานของการยกกำลังอาร์คิมีดีนบนทุ่นในสาขาด้านซ้ายของเรือสื่อสารในรูปที่ 2-b และสำหรับการทำงานของกลไกการรักษาระดับของเหลวในสาขาด้านซ้ายของเรือสื่อสาร ในรูป 1-b?
จากการวิเคราะห์เปรียบเทียบกลไกสำหรับการดำเนินการตามผลกระทบธรรมชาติ "การสื่อสารเรือ" และ "การยกกองกำลังอาร์คิมีดีน" เมื่อพิจารณาจากตัวเลข เห็นได้ชัดว่าแหล่งพลังงานดังกล่าวในท้ายที่สุดคือการทำงานของแรงโน้มถ่วงใน ขวาสาขาของเรือสื่อสารที่ส่งใน ซ้ายเรือสื่อสารผ่านกลไกไล่ระดับแรง (ดูแผนภาพสำหรับพื้นผิวศักย์ไฟฟ้าที่แสดง) ของแรงดันอุทกสถิตของ "เสา" ของมวลโน้มถ่วงของของเหลว
ข้อสรุปนี้ได้รับการยืนยันโดยสมมุติฐานของกลไก: "กลไกการออกฤทธิ์ของแรงใดๆ ที่เคลื่อนตัวทำงานสามารถรับรู้ได้ก็ต่อเมื่อเป็นพื้นฐานเท่านั้นที่เป็นการตอบโต้ของแรงอื่น" แรงอาร์คิมีดีน กล่าวโดยนัยว่า "อาศัย" เนื่องจากมันอยู่บนพื้นผิวศักย์เท่ากันของระบบอ้างอิง ซึ่งระบุไว้ในตัวเลขด้วยเส้นประสีแดง ข้อสรุปนี้มีความสำคัญสำหรับการให้เหตุผลในภายหลัง
จากการให้เหตุผลของเราเกี่ยวกับกฎหมายว่าด้วยเรือสื่อสาร เรามาถามคำถามชุดที่สามและพิจารณาแผนภาพหลักการทำงานของเครื่องเคลื่อนที่ถาวรประเภทที่สองซึ่งเสนอโดยนักประดิษฐ์ในรูปที่ 3

รูปที่ 3 แสดงหลอดรูปวงรีที่วางในแนวตั้ง ในตัวอย่างก่อนหน้านี้ เราถือว่าเป็นระบบของเรือสื่อสารด้านซ้ายและขวา ลูกบอลแก้ไขจะถูกวางอย่างอิสระในท่อโดยไดรฟ์ภายนอกบางส่วนนำของเหลวเข้าสู่การไหลแบบวนซ้ำ (ทวนเข็มนาฬิกา)
คำถาม:
1. การเปลี่ยนแปลงทิศทางจะส่งผลอย่างไรค ระบบอ้างอิงสำหรับแรงโน้มถ่วงและการไล่ระดับของแรงดันอุทกสถิตซึ่งเป็นผลมาจากการปฏิบัติตามกฎของอาร์คิมิดีสในคอลัมน์ของไหลของภาชนะสื่อสารภายใต้เงื่อนไขของการเคลื่อนที่ในแนวตั้งของของไหลในภาชนะสื่อสารในสนามโน้มถ่วงของ ดาวเคราะห์เมื่อมันเพิ่มขึ้นโดยความเฉื่อยขึ้นและเมื่อมันตกอยู่ภายใต้อิทธิพลของน้ำหนักลง?
2. จะเป็นที่รู้จัก ผลกระทบทางกายภาพของการขับของเหลวขึ้นไป เครื่องยกน้ำที่มีชื่อเสียงของประเภท " ลิฟต์โดยสาร»?
คำตอบของนักประดิษฐ์ VD:
ขนาดของแรงโน้มถ่วงบนมวลควบคุมจะเปลี่ยนไประหว่างการเคลื่อนที่ในแนวตั้งพร้อมกับกรอบอ้างอิง.
การไหล "ตกลง" ในท่อด้านซ้ายเข้าใกล้สภาวะไร้น้ำหนักและไม่มีแรงของอาร์คิมีดีน และแรงเฉื่อยที่เกินพิกัดจะส่งผลต่อการไหลและแรงอาร์คิมีดีนจะเพิ่มขึ้น ดังนั้น ภายใต้เงื่อนไขของการเคลื่อนที่ในแนวดิ่งของของเหลว ความไม่เท่าเทียมกันของการกระทำของแรงเหล่านี้เกิดขึ้นและงานของพวกมันถูกรับรู้เพื่อขับเคลื่อนมวลของของเหลวไปสู่การไหลแบบทิศทางเดียวทวนเข็มนาฬิกา
ตามสูตรของกฎของอาร์คิมิดีสว่าด้วยขนาดของแรงยกของทุ่น โดยที่g\u003d 9.8 m / s 2 การเร่งความเร็วการตกอย่างอิสระ เอ- การเร่งความเร็วของแรงภายนอกของไดรฟ์ (สตาร์ท) ของของเหลวเข้าสู่การไหลผ่านท่อลูป มคือมวลของปริมาตรของของเหลวที่ถูกแทนที่โดยทุ่น
Fอา = มก. เมื่อของเหลวไม่เคลื่อนที่สัมพันธ์กับสนามโน้มถ่วงของโลก.
Fซ้าย \u003d ม. (g -a),เมื่อของเหลวเคลื่อนที่สัมพันธ์กับสนามโน้มถ่วงของดาวเคราะห์ในลักษณะไหลลง
Fสิทธิ \u003d ม. (ก. + ก),เมื่อของเหลวเคลื่อนที่สัมพันธ์กับสนามโน้มถ่วงของดาวเคราะห์ในกระแสลม แล้ว:
เมตร (g-a) < ม. (ก. + ก); Fซ้าย< Fเอ ถูก.
หลังจากการเร่งความเร็วเริ่มต้นของของเหลวตามท่อวงแหวน (ภาชนะสื่อสาร) โดยไดรฟ์ภายนอกแล้วในขณะที่ปิด ค่าแรงยกของทุ่นลอยถือเป็นแรงของ AIRLIFT-DRIVE ของของเหลวเข้าสู่กระแสน้ำ (โดยการเปรียบเทียบกับหลักการทำงานของอุปกรณ์ยกน้ำ "airlift" ซึ่งทุ่นลอยทำหน้าที่เป็นลูกสูบเพื่อ ขับเคลื่อนกระแสน้ำขึ้น) แรงขับเคลื่อนนี้ตามกฎหมายของอาร์คิมิดีสและกฎของเรือสื่อสารจะกำหนดโดย:
Fการขับ = Fสิทธิ - Fซ้าย = ม. (ก. + ก) - ม. (ก. - ก.).
บันทึก:วิธีการเดียวกันในการพิสูจน์ประสิทธิภาพของมอเตอร์อาร์คิมีดีน (ไดรฟ์) ในตัวแปรสำหรับแรงอาร์คิมีดีนในสนามโน้มถ่วงนั้นใช้ได้กับมอเตอร์อาร์คิมีดีน (ไดรฟ์) ในตัวแปรของแรงอาร์คิมีดีนในด้านแรงเฉื่อยของแรงเหวี่ยง . ฉันใช้รูปแบบไดรฟ์รุ่นที่สองโดยการทำงานของกองกำลังอาร์คิมีดีนในการประดิษฐ์ pสิทธิบัตรของสหพันธรัฐรัสเซียหมายเลข 2396681 ลงวันที่ 10.08.2010 "เครื่องกำเนิดอุทกพลศาสตร์แม่เหล็กไฟฟ้า (EMGDG)" ฉันจะอวดเฉพาะภาพที่คาดว่าจะปรากฏในอนาคตเท่านั้น
วรรณกรรม :
1. Bogomolov V.I. สิทธิบัตรของสหพันธรัฐรัสเซียหมายเลข 2396681 ลงวันที่ 08/10/2010 สำหรับ "เครื่องกำเนิดอุทกพลศาสตร์แม่เหล็กไฟฟ้า (EMGDG)" http://khd2.narod.ru/authors/bgmlv/bgmlv.htm;
2. Bogomolov V.I. M-กระบวนทัศน์ของฟิสิกส์ .
3. ซูฟ วี.วี. "ความหนาแน่นของพลังงานคุณสมบัติของแร่ธาตุและโครงสร้างพลังงานของโลก" - เซนต์ปีเตอร์สเบิร์ก: Nauka, 1995 - 128
จากจดหมายถึง E. Arsentiev
สวัสดียูจีน!
ฉันป่วยมาครึ่งฤดูหนาว อ่านนิยายวิทยาศาสตร์ เพื่อความสนุกสนาน ฉันนึกถึงประวัติศาสตร์ทางเลือกที่เครื่องยนต์ไอน้ำสำหรับเรืออาจปรากฏขึ้นเมื่อสองสามพันปีก่อนหน้า
นี่คือที่มาของสคีมา ความเฉพาะเจาะจงของมันคือ ยิ่งท่อ "ส่งกำลัง" ในแนวตั้ง "ลำเลียง" ของของไหลเข้าสู่กระแสน้ำสูงเท่าใด ประสิทธิภาพของเครื่องจักรไอน้ำของอาร์คิมีดีนก็จะยิ่งมากขึ้นเท่านั้น ดังนั้นส่วนหนึ่งของโครงสร้างจะต้องไม่เพียงวางไว้ในตัวถังเท่านั้น แต่ยังต้องอยู่ในกระดูกงูด้วยเช่นบนเรือยอทช์
เกี่ยวกับหลักการทำงานของเครื่องยนต์ Archimedean ตามสิทธิบัตร RF ของฉันสำหรับเครื่องกำเนิดไฟฟ้า EMGDG (ซึ่งน่าเสียดายที่ไม่มีใครสนใจมาเป็นเวลาหนึ่งปีแล้ว!) ฉันเขียนบทความในหน้าเดียว “กฎหมายว่าด้วยเรือสื่อสารบอกอะไรเราอีก”.ฉันแนบไฟล์ไปกับจดหมาย วัสดุนี้สามารถช่วยให้ผู้ที่ชื่นชอบ DIY คิดออกเมื่อสร้างแบบจำลองของเรือยอทช์ดังกล่าว
ขอแสดงความนับถือ Vyacheslav
Steam Archimedean เครื่องยนต์-airlift Bogomolov
ด้วย Arsentiev vortex jet สำหรับเรือยอทช์

เพิ่มพลังงานเชื้อเพลิงที่ไม่หมุนเวียนโดยผู้ใช้สำหรับการทำงานของหม้อไอน้ำ แหล่งพลังงานหมุนเวียนฟรีจากสิ่งแวดล้อมสองแหล่ง:
1. เกิดจากหม้อไอน้ำแบบท่อแนวตั้ง ฟองไอน้ำและกระแสหมุนเวียนเพิ่มพลังให้กับอุปกรณ์โดยการทำงานของกองกำลังอาร์คิมีดีนในการไหลขึ้นด้านบนผ่านท่อขึ้นไปจึงทำหน้าที่เป็นลูกสูบสำหรับขับเคลื่อนส่วนผสมไอน้ำและไอน้ำเข้าสู่กระแส ผ่านท่อส่งน้ำ ในเวลาเดียวกัน ไม่มีแรงอาร์คิมีดีนไหลลงสู่ท่อและไม่ไหลช้าลง ต้องขอบคุณไปป์ไลน์ที่มีรูปร่างเป็นเกลียวบรรจบกัน ความเร็วการไหลจึงเพิ่มขึ้นเมื่อเข้าใกล้หัวฉีด
2. ส่วนผสมไอน้ำกับน้ำผ่านหัวฉีด ฉีดเข้าไปในกระแสน้ำวนแบบเจ็ทเดิมในฐานะของเหลวทำงานที่ร้อนและขยายตัว กระแสน้ำวน toroidal ที่เกิดขึ้นนั้นถูกเติมเต็มอย่างต่อเนื่องด้วยการไหลของของไหลทำงานที่ร้อนจากอุปกรณ์ในมือข้างหนึ่ง และในทางกลับกัน จากการระบายความร้อนอย่างต่อเนื่องและการบีบอัดแบบอะเดียแบติกของของไหลทำงาน ถูกเติมเต็ม ดีดออกน้ำนอกเรือภายใต้แรงดันที่มาพร้อมกับตัวกลางที่ระดับความลึก การทำงานของแรงดันลึกเพิ่มพลังให้กับเครื่องยนต์ขับเคลื่อน
3. การไม่มีอยู่ในโครงร่างของหน่วยแปลงพลังงานที่ไม่จำเป็นจากรูปแบบหนึ่งไปยังอีกรูปแบบหนึ่ง การไม่มีกระปุกเกียร์แบบกลไกและชิ้นส่วนทางกลที่เคลื่อนที่ได้จะเพิ่มประสิทธิภาพและความน่าเชื่อถือของอุปกรณ์
หมายเหตุ: ฉันเชื่อว่าความเป็นไปได้พื้นฐานที่ระบุไว้ของการใช้พลังงานฮาร์ดแวร์ของงานอิสระของแรงดันอุทกสถิตของดาวเคราะห์ในรูปแบบของเครื่องยนต์ไอพ่นไอน้ำ - ตัวขับเคลื่อนของไอพ่นน้ำวนนั้นคล้ายกับหลักการ "การระเบิด" ของ V . ชอเบอร์เกอร์.
มีความคิดเพิ่มเติม บทบาทของเตาเผาและหม้อต้มไอน้ำภายในท่อส่งลมสามารถทำได้โดยอุปกรณ์อิเล็กโทรลิซิสในน้ำที่มีอาร์กพัลซิ่งแรงดันสูงที่อยู่ภายในท่อส่งลมและเผาฟองสบู่ของส่วนผสมไฮโดรเจน-ออกซิเจนที่ได้ (การระเบิดขนาดเล็ก) ทันที และ จึงเกิดฟองไอน้ำในท่อส่งไฟฟ้า อันเป็นผลมาจากอิเล็กโทรไลซิสและไมโครเอ็กซ์โพลชั่น ของเหลวในท่อจะถูกแตกตัวเป็นไอออน จากนั้นในฐานะที่เป็นของเหลวทำงานที่มีประจุไฟฟ้า มันจะเป็นไปได้ นอกเหนือไปจากการกลายเป็นไอ เพื่อใช้ตามความคิดของฉัน สิทธิบัตร EMGDG ในการผลิตกระแสไฟฟ้าโดยเครื่องกำเนิดไฟฟ้าแบบแมกนีโตไฮโดรไดนามิกสำหรับการป้อนซ้ำของอาร์ค voltaic ในภายหลัง ... นี่จะเป็นวิธีที่สามในการเพิ่มพลังของเครื่องยนต์ไอน้ำ Archimedean ด้วยไอพ่นใบพัดน้ำวน
เอฟเฟกต์ไฟฟ้าไฮดรอลิกของ L.A. Yutkin (การระเบิดด้วยไฮดรอลิกด้วยประกายไฟ) ที่ใช้เป็น "เครื่องขว้างไอพ่น" (“YuT” 1957) เป็นที่ยอมรับในทันที
สิ่งที่แนบมาคือรูปแบบต่าง ๆ ของเครื่องยนต์ไอน้ำสันดาปภายใน
ไอน้ำ "หม้อไอน้ำ" บนแก๊ส
(ตัวเลือก: ไฮโดรเจน + ออกซิเจน โพรเพน + อากาศ)

ระบบอัตโนมัติอย่างง่ายของการปล่อยก๊าซเข้าไปในห้องเผาไหม้สำหรับการระเบิดเป็นวัฏจักรของส่วนผสมการทำงาน ต้นแบบคือการทำงานแบบสองจังหวะของเครื่องยนต์สันดาปภายใน
ก๊าซส่วนแรกสำหรับการก่อตัวของส่วนผสมที่ติดไฟได้ในห้องเผาไหม้เมื่อสตาร์ทเครื่องยนต์ถูกสูบด้วยแรงดันด้วยตนเองโดยปั๊มภายใต้แรงดัน จากนั้นการระเบิดจะเริ่มต้นโดยการปล่อยไฟฟ้า (ประกายไฟ, อาร์ค) โดยไม่มี การมีส่วนร่วมของปั๊มภายนอก
หลังจากการระเบิดในห้อง ส่วนหนึ่งของส่วนผสมไอน้ำและไอน้ำจะถูกฉีดเข้าไปในท่อส่งอากาศด้วยแรงกระตุ้น และปริมาตรที่ว่างในห้อง ดังนั้น ตามกฎหมายว่าด้วยเรือสื่อสาร น้ำจากท่อส่งอากาศจึงถูกครอบครอง . น้ำนี้จะบีบอัดส่วนผสมที่ติดไฟได้ที่เกิดขึ้นในห้องทำงานภายใต้ความกดดันตามหลักการของกระดิ่งลมตามความลึกของกระดิ่งลมเข้าไปในอ่างเก็บน้ำ ทันที การเผาไหม้ของส่วนผสมการทำงานครั้งต่อไปจะเกิดขึ้นโดยอัตโนมัติ
ในรูปแบบการออกแบบที่เรียบง่าย "เครื่องยนต์ไอน้ำสันดาปภายใน"การผลิตงานฝีมือที่ยากที่สุดคือการทำให้ท่อมีความหนาแน่นควบคู่ไปกับห้องเผาไหม้และคุณภาพของวาล์วแก๊ส
การให้เหตุผลในหัวข้อผลกระทบทางกายภาพในการทำงานของเครื่องยนต์ Clem
(แต่ไม่เกี่ยวกับรายละเอียดของการออกแบบ!)
ลองทำการทดลองเก็งกำไรกัน
ลองนึกภาพหลอด AB ที่เต็มไปด้วยของเหลว พิจารณาสองความเป็นไปได้ เครื่องกลวิธีเคลื่อนย้ายของเหลวผ่านท่อ นี่คือ: ความแตกต่างของการไล่ระดับสีความดันในโครงสร้างของสารของของเหลวตามท่อและ แรงเฉื่อยมวลสารที่เป็นของเหลว

หากท่อได้รับการแก้ไขบนเพลาหมุนเพื่อให้กลายเป็นพื้นผิวด้านข้างของกรวยดังในรูปที่ 1 (เรียกการออกแบบนี้ว่า "โรเตอร์") ภายใต้การกระทำของแรงเหวี่ยง (ซีบีเอส) เราสามารถสังเกตวิธีการข้างต้นได้ ขับของเหลวเข้าสู่กระแสน้ำ ในการใช้วิธีการเหล่านี้ คุณต้องสร้างบางส่วน เงื่อนไขที่เพียงพอ , เพราะ วิธีการเหล่านี้ไม่ได้ถูกนำมาใช้ในด้านแรงเหวี่ยงเสมอไป
1. ถ้าจบรู ที่ท่อ ปิด(เงื่อนไขสำหรับการบรรลุผล) จากนั้นในท่อภายใต้การกระทำของแรงเหวี่ยงรัศมี ไล่ระดับความดันในของเหลวที่มีความดันสูงสุด ณ จุดหนึ่ง ที่. (ไม่มีไดรฟ์)
2. ถ้าหลุมมีพื้นที่เท่ากันและ เปิดจากนั้น CB จะไม่สร้างแรงดันเพิ่มเติม แต่จะมีเงื่อนไขอื่นเกิดขึ้นสำหรับการนำไดรฟ์เข้าสู่กระแสด้วยแรงเฉื่อย
ถ้ารูปลาย A และ B ของท่อ เปิดและมีอิสระในการเคลื่อนย้ายมวลของสสารภายใต้การกระทำของแรงเฉื่อยของแรงเหวี่ยงหนีศูนย์กลาง ของเหลวก็จะเคลื่อนที่เป็นแนวรัศมีผ่านท่อ วิ่งจากจุด A ไป B ถ้ารู A ถูกหย่อนลงไปในถัง (เปิดออก บรรยากาศ) จากนั้นของเหลวจากถังจะถูกสูบจากล่างขึ้นบนตามหลักการออกแบบของปั๊มหอยโข่ง (มี DRIVE) ในกรณีนี้ ทั้งสองวิธี (การไล่ระดับแรงดันและแรงเหวี่ยงหนีศูนย์กลาง) มีส่วนร่วมในการทำให้ของเหลวเคลื่อนที่
3. ถ้าปลาย A และ B ของท่อของเราเชื่อมต่อกันด้วยท่ออีกอันหนึ่งในรูปแบบของไปป์ไลน์แบบวนซ้ำ (หมุนร่วมกับท่อ AB) มวลของของเหลวจะไม่เคลื่อนที่ผ่านท่อเพราะ ในไพพ์ไลน์แบบวนซ้ำ จะมีการสร้างการไล่ระดับแรงดันตรงข้ามกันสองระดับ ชดเชยและยับยั้งซึ่งกันและกัน แรงเหวี่ยงในท่อ AB จะไม่สามารถเคลื่อนย้ายสารได้ เนื่องจากไม่มีอิสระ (ไม่มี DRIVE)
4. หากการออกแบบเฉพาะของแท่นทดลองเสมือน (รูปที่ 2) อนุญาตให้ไพพ์ AB (โรเตอร์) หมุนต่อไปในไปป์ไลน์ LOOPED แต่ท่อที่เชื่อมต่อปลายจะได้รับการแก้ไข นิ่ง(เรียกการออกแบบนี้ว่า "สเตเตอร์") แล้วอื่นๆ เฉพาะเจาะจง เงื่อนไขการดำเนินการสำหรับการเคลื่อนที่ของของไหลภายใต้การกระทำของ CBS กล่าวคือในกรณีของรูปที่ 1 และ 2 มวลของของไหลจะเคลื่อนที่ตามแนวรัศมีตามแนวท่อพุ่งขึ้นจากจุด A ถึง B (มีไดรฟ์ของ “ปั๊มหอยโข่ง”)
ทำไม เพราะไม่เหมือนกับเงื่อนไขของวรรคที่ 3 ในไปป์ไลน์วนรอบนี้ จะไม่ถูกสร้างขึ้นไล่ระดับแรงดันชดเชยซึ่งกันและกันตั้งแต่ การไล่ระดับสีจะไม่มีแรงกดดันใด ๆ เหมือนกับโครงร่างของจุดที่ 2 ความดันเดียวเท่ากับ ขีดสุด ความดันที่จุด B ทำไม เพราะตามกฎของปาสกาล ของเหลวจะถ่ายเทแรงดันสูงสุดอย่างสม่ำเสมอจากจุด B ตลอดไปป์ไลน์ที่ปิดทั้งหมด ถ้าพื้นที่หน้าตัดของการไหลผ่านท่อและความเร็วการไหลจะเท่ากันทุกที่ในท่อ
ดังนั้น จุดยืนของเราจึงเริ่มทำงานในประการแรก เช่น ตัวสะสมพลังงานไม่เพียงแต่พลังงานจลน์ของการหมุนของมวลของเหลวเท่านั้น แต่ยังรวมถึงพลังงานจลน์ของการไหลแปลของมวลของเหลวด้วย ในเวลาเดียวกัน ความเร็วของการไหลที่เกิดจากการทำงานของ DRIVE แบบแรงเหวี่ยงจะเพิ่มขึ้นภายใต้การกระทำของ CLS จนกว่างานนี้จะได้รับการชดเชยด้วยการทำงานของแรงต้านทานอุทกพลศาสตร์ในท่อ ดังนั้นพลังงานของการทำงานของแรงเสียดทานจะถูกแปลงเป็นพลังงานความร้อนและประการที่สองขาตั้งจะทำงานเป็นเครื่องกำเนิดความร้อนด้วย
5. หากด้วยวิธีใด ๆ ในการตั้งค่าการทดลอง (รูปที่ 3) เราเพิ่มกังหันเข้าไปในวงจรในส่วน STATOR จากนั้นเราจะบังคับให้ของเหลวเคลื่อนที่ไปในทิศทางตรงกันข้ามตามโรเตอร์ VA ด้วยแรงที่มากกว่าแรงเหวี่ยงหนีศูนย์กลางเพราะตามพลังงานที่ใช้ไปในการทำงานของไดรฟ์ภายนอกนี้ แรงเฉื่อยโคริโอลิสจะเป็น ม้วนตัวเองโรเตอร์
เราจะถือว่า กลิ้งเองโรเตอร์เป็นจุดประสงค์ของการออกแบบเครื่อง Clem ไม่น่าเป็นไปได้ที่หัวฉีดจะทำหน้าที่นี้ ฉันคิดว่าไม่ใช่หัวฉีด แต่ต้องใช้หัวฉีดเพื่อทำให้ของเหลวเย็นลงเท่านั้น
6. ลองพิจารณาเทคนิคการออกแบบอื่น (นอกเหนือจากตัวอย่างกังหันไดรฟ์ภายนอก) HOW บังคับ ย้ายของเหลวไปในทิศทางตรงกันข้ามตามท่อ ตอบโต้การทำงานของ DRIVE ของแรงเหวี่ยงหนีศูนย์ความเฉื่อยซึ่งหมายถึงมีแรงที่มากกว่าแรงเหวี่ยงหนีศูนย์กลาง
เมื่อต้องการทำเช่นนี้ ส่วนหนึ่งของการไหลแบบวนซ้ำในส่วน BA ของโรเตอร์ REPLACE ช่องตามโครงร่างของกลไกที่รู้จักกันดี "สกรูของอาร์คิมิดีส" มันแปลงการเคลื่อนที่แบบหมุนของสกรูเป็นการเคลื่อนที่เชิงแปลของของไหล นี่คือการเคลื่อนที่ไปข้างหน้าของการไหลผ่านสกรูของอาร์คิมิดีสที่จะสร้างทิศทางการไหลย้อนกลับในไปป์ไลน์แบบวนซ้ำทั้งหมด ซึ่งมีขนาดใหญ่กว่าและต้านแรงเหวี่ยงของแรงเฉื่อยของมวลของของไหลโรเตอร์
แทนที่จะใช้หลอด AB เราใช้ช่อง AB มาทำ ROTOR ให้เหมือนสกรูของอาร์คิมิดีสในรูปกรวยที่มีช่องเกลียวเหมือนส่วนที่คล้ายกันในเครื่องของเคล็ม สกรูรูปกรวยจะสร้างแรงดันล็อคสูงที่ปลายกรวยเพื่อต่อต้านและกำจัดแรงเหวี่ยงหนีศูนย์กลาง
เราได้อะไรจากแผนการทดลองแบบเก็งกำไรของเรา? เสียพลังงาน ภายนอกไดรฟ์เพื่อหมุนโรเตอร์ อุปกรณ์ใช้เอฟเฟกต์ทางกายภาพอย่างน้อยสองอย่าง:
A) แรงเหวี่ยงของแรงเฉื่อยถูกสร้างขึ้นและงานของแรงเหล่านี้สร้างแรงกดดันสูงในไปป์ไลน์แบบวนซ้ำทั้งหมด ข้าพเจ้าดึงความสนใจไปที่สมมุติฐานที่ข้าพเจ้าสนับสนุน กล่าวคือ ผลปรากฏการณ์ “ความดันในของเหลว” ที่เกิดขึ้นที่นี่ เป็นปรากฏการณ์ของการมีอยู่ของ ฟรีพลังงานระหว่างการหมุนของมวลของของไหลในโรเตอร์-มู่เล่ ทำไมฟรี? เนื่องจากผู้บริโภคสามารถใช้พลังงานแรงดันนี้ในทางใดๆ ได้ฟรี และหลังจากนั้น เมื่อเบรกโรเตอร์ จะสามารถกู้คืนพลังงานจลน์ทั้งหมดของการหมุนมวลที่สะสมโดยมู่เล่ ซึ่งถูกใช้โดยไดรฟ์ภายนอกในระหว่าง การหมุนของมู่เล่ การอ้างอิงถึงการฟื้นตัวของพลังงานจลน์ของการหมุนพิสูจน์ให้เห็นถึงธรรมชาติของการเกิดแรงดันในของเหลวในสนามของแรงเหวี่ยงหนีศูนย์กลาง วิธีหนึ่งที่จะใช้ของกำนัลแห่งพลังงานแรงดันคือการสร้างโครงสร้างภายในของของเหลวขึ้นใหม่
B) แรงเฉื่อยของโบลิทาร์ถูกสร้างขึ้น โดยแปลง WORK และพลังงาน (สำหรับตอนนี้ สมมติว่า แหล่งกำเนิดภายนอกของไดรฟ์ใดๆ ก็ตาม) โดยการเคลื่อนที่ในแนวรัศมีของมวลของเหลวใน WORK ของตัวขับโรเตอร์เป็นการหมุนและพลังงานจลน์ของการหมุน ของมวลของไหลของโรเตอร์ และการทำงานของแรงโคริโอลิสก็สร้างเช่นกัน แรงกดดันเพิ่มเติม, "ล็อค" กระแสตรงข้ามที่สร้างขึ้นโดยการทำงานของแรงเหวี่ยง
7. รับได้ที่ไหน พลังงานฟรีและวิธีการสร้างหัวกระแสตรงไปยังแรงดันที่เกิดจากแรงเหวี่ยงเพื่อสร้างความเร็วที่เหมาะสมของการเคลื่อนที่ของมวลของเหลวจากขอบไปยังศูนย์กลางของโรเตอร์ (จากจุด B ไปยังจุด A) และด้วยเหตุนี้ “ เหมาะสม” กองกำลังโคริโอลิสสามารถ “เหมาะสม” โปรโมทตัวเอง โรเตอร์?
ให้ความสนใจกับพารามิเตอร์เฉพาะดังกล่าวซึ่งจะปรากฏในอุปกรณ์ตามรูปแบบ Clem เมื่อเริ่มต้น (โปรโมชัน) โดยสตาร์ทเตอร์ภายนอก แทนที่จะใช้ท่อ AB เราใช้ช่องทางของสกรูทรงกรวย ซึ่งทำขึ้นตามการคำนวณของรูปทรงดังกล่าว ซึ่งแรงดันที่เกิดจากการเคลื่อนที่ไปข้างหน้าของการไหลจะ "เหมาะสม" ข เกี่ยวกับมากกว่าแรงดันการไหลที่เกิดจากแรงเหวี่ยงหนีศูนย์กลาง และนี่หมายความว่าในช่องเกลียวในกระแสจาก B ถึง A พารามิเตอร์เช่น "แรงดันสูง" จะถูกสร้างขึ้น ในการสร้างความเร็วของโรเตอร์ที่ "เหมาะสม" เนื่องจากการทำงานของแรงโคริโอลิส อัตราการไหลของของไหลผ่านช่องจะต้องมีขนาดใหญ่ เมื่อเคลื่อนที่ผ่านช่องของเหลวด้วยความเร็วสูง แรง "ดี" ของความต้านทานอุทกพลศาสตร์และแรงเสียดทานจะเกิดขึ้น - พารามิเตอร์อื่นที่ได้รับของของเหลวในฐานะของไหลทำงานและตัวทำงานในอุปกรณ์ของเรา
พารามิเตอร์ที่ได้มาของของเหลวสามารถให้อะไรแก่เราในขั้นของการให้เหตุผลและการทดลองเก็งกำไรนี้ พวกเขาร่วมกันอาจสร้างเงื่อนไขสำหรับ การปรับโครงสร้างใหม่ ของเหลว .
8. เราจะยินดีเป็นอย่างยิ่งหากของเหลวที่สกรูของอาร์คิมิดีสผลักผ่านช่องนั้นก็จะขยายตัวเมื่อถูกความร้อน ซึ่งจะเพิ่มปริมาตรในส่วนนี้ของช่อง! หากแรงระดับโมเลกุลอันทรงพลังที่เก็บโดยสสารเข้ามามีบทบาท และแหล่งพลังงานที่ "กระตุ้นใหม่" นี้จะช่วยให้เราสร้างแรงดันการไหลที่ "เหมาะสม" ในทิศทางจาก B ถึง A เราก็สามารถคาดการณ์ได้ว่าหลังจากที่สตาร์ทเตอร์หมุนเป็น ความเร็วของโรเตอร์ที่แน่นอน จากนั้นโรเตอร์สามารถหมุนต่อไปได้โดยอิสระเนื่องจากพลังงานภายในของของไหล
จะเป็นอย่างไร เอียงแรงของของไหลที่ขยายตัวซึ่งทำหน้าที่เป็น DRIVE ของมวลของของไหลเข้าสู่กระแสไหล ตอบโต้ DRIVE ด้วยแรงเหวี่ยงหนีศูนย์กลางเพื่อเปลี่ยนทิศทางการไหลไปในทิศทางตรงกันข้าม? แรงสามารถพึ่งพาแรงอื่นได้เท่านั้น - กฎแห่งกลศาสตร์ คำตอบคือสิ่งนี้ ของเหลวที่ขยายตัวจะขยายตัวไปตามทิศทางของการไหล VA ที่เกิดจากสกรูของอาร์คิมิดีส พิงเกี่ยวกับแรงของแรงกระตุ้น VA จากสกรูของอาร์คิมิดีส เกี่ยวกับแรงเฉื่อยของมวลของกระแสที่ก่อตัวขึ้นแล้วโดยสกรูอาร์คิมิดีส
มีของเหลวที่ขยายตัวได้ดีเมื่อถูกความร้อน เคลมใช้น้ำมันดอกทานตะวันเป็นสารทำงานของเหลว รับประกันความต้านทานอุทกพลศาสตร์และแรงเสียดทานเพื่อให้ความร้อนกับของเหลวที่อุณหภูมิสูง การให้ความร้อนภายใต้แรงดันจะเคลื่อนขอบเขตอุณหภูมิ การวัดการเปลี่ยนเฟส การเดือด การเพิ่มปริมาตรการขยายตัวของของเหลวที่ร้อนยวดยิ่ง สามารถสันนิษฐานได้ว่าด้วยพารามิเตอร์ดังกล่าว cavitation อาจเกิดขึ้นและบางทีมันอาจจะมีส่วนทำให้ความดันเพิ่มขึ้น ...
9. ดังนั้นให้ความร้อนในหนึ่งรอบ (รอบ) ของการเคลื่อนไหวในระบบปิดของเหลวก่อนที่จะเริ่มรอบใหม่ ต้องบังคับให้เย็น . ตัวอย่างเช่น ขั้นแรกให้ฉีดพ่นผ่านหัวฉีด จากนั้นจึงผ่านเพิ่มเติมผ่านหม้อน้ำทำความเย็น และหากในมอเตอร์ Clem เช่นเดียวกับเครื่องยนต์ไอน้ำ การจัดเรียงโครงสร้างของสสารแบบวนรอบจะเริ่มขึ้นเมื่อถูกให้ความร้อนและขยายตัว หากสิ่งนี้ปล่อยพลังงานภายในของของเหลวซึ่งสามารถเปลี่ยนเป็นพลังงานกลของการหมุนของ โรเตอร์แล้ว (!) ไม่มีใครยกเลิกกฎของวัฏจักรการ์โนต์
10. แต่แล้วคำถามก็ยังคงอยู่ที่แหล่งที่มาของพลังงานอิสระซึ่งในที่สุดการขยายตัวของเหลวหมุนโรเตอร์? คำตอบของฉัน. แหล่งที่มาของพลังงานอิสระที่นี่คือ PRESSURE ที่สร้างขึ้นโดย GIFT แรงเหวี่ยงของความเฉื่อย
คำแถลงสมมติฐาน . โซลูชันทางเทคนิคที่ช่วยให้มั่นใจถึงความสามารถในการทำงานของมอเตอร์ Clem ระบบต่อเนื่อง (“loopback”) เกิดขึ้นได้ ผลกระทบทางกายภาพ:
ในด้านการกระทำของแรงเหวี่ยงในช่องของสกรูอาร์คิมิดีส แรงดันอิสระเกิดขึ้น (และแรงโคริโอลิสเกิดขึ้น)
งานกลของแรงกด ความเร็วการไหล และแรงเสียดทานในช่องให้ความร้อนกับของเหลว
ของเหลวที่ให้ความร้อนในช่องจะขยายตัวและทำให้b เกี่ยวกับการทำงานของ DRIVE ของมวลของเหลวเข้าสู่กระแสมากกว่าการทำงานของ DRIVE ของแรงเหวี่ยงที่ต่อต้านมัน
การทำงานของการไหลของของไหลในการเคลื่อนที่ในแนวรัศมีของมวลจากรอบนอกไปยังศูนย์กลาง (เส้นทาง VA) โดยความเฉื่อยของโคลิโอลิสจะบังคับให้คลายเกลียวโรเตอร์ของอาร์คิมิดีสด้วยตนเอง
การหมุนตัวเองของโรเตอร์ทำให้เกิดสนามของแรงเหวี่ยงหนีศูนย์กลางและการทำงานของสกรูของอาร์คิมิดีส และที่สำคัญที่สุด ของไหลที่ขยายตัวจะตั้งค่าการไหลผ่านช่องสเตเตอร์ในการเคลื่อนที่เพื่อทำซ้ำรอบใหม่ของการไหลของของไหลแบบวนซ้ำใน อุปกรณ์;
การไหลของของเหลวผ่านหม้อน้ำระบายความร้อนในสเตเตอร์สร้างเงื่อนไขสำหรับวงจรการ์โนต์สำหรับเครื่องยนต์ความร้อน
ดังนั้นแหล่งพลังงานสำหรับการทำงานของเครื่องยนต์ Clemas จึงเป็นผลกระทบทางกายภาพตามธรรมชาติสองประการ กล่าวคือ: แรงดันอิสระในเขตแรงเหวี่ยงในโรเตอร์และการระบายความร้อนของของเหลวโดยอิสระโดยสภาพแวดล้อมภายนอกในสเตเตอร์ การบีบอัดแบบอะเดียแบติกระหว่างการทำความเย็น ของเหลวสามารถสร้าง "การดูด" ของการไหลจากส่วนของช่องโรเตอร์ไปยังช่องสเตเตอร์ ทำให้เกิดกำลังเครื่องยนต์เพิ่มขึ้น
ระบบเครื่องยนต์ Clem ไม่ได้ปิด แต่ทำการแลกเปลี่ยนพลังงานเชิงอุณหพลศาสตร์และเฉื่อยกับสิ่งแวดล้อม และใช้พลังงานส่วนหนึ่งของสิ่งแวดล้อมฟรีระหว่างการแลกเปลี่ยนพลังงานนี้
คำอธิบายของการประดิษฐ์
"เครื่องกำเนิด Bogomolov - ตัวแปลง (GB-K)"
คำจำกัดความของการประดิษฐ์วัตถุประสงค์ .
อุปกรณ์ "GB-K" มีไว้สำหรับผู้บริโภคเพื่อรับพลังงานไฟฟ้าในรูปของกระแสตรง หมายถึงโรงไฟฟ้าที่ใช้แหล่งพลังงานทดแทนของทรัพยากรธรรมชาติหมุนเวียน
การออกแบบของอุปกรณ์คือระบบที่ซับซ้อนของสองระบบเปิดคือเครื่องกลและไฟฟ้า เหล่านี้เป็นระบบเปิด (ไม่ปิด) ที่เชื่อมต่อกับสิ่งแวดล้อมโดยการแลกเปลี่ยนพลังงานและดึงพลังงานออกมา เช่นเดียวกับโรงไฟฟ้าทางเลือกอื่น ๆ ที่เป็นที่รู้จัก แผงโซลาร์เซลล์ กังหันลม โรงไฟฟ้าพลังน้ำ
เนื่องจากอุปกรณ์ “AK” เป็นระบบเปิด หลักการทำงานของอุปกรณ์จึงไม่ละเมิดกฎการอนุรักษ์และการเปลี่ยนแปลงพลังงาน ดังนั้นอุปกรณ์ “AK” จึงไม่จัดว่าเป็น “เครื่องจักรเคลื่อนที่ถาวรประเภทที่หนึ่งและสาม” ตามหลักวิชา โดยหลักการแล้วอุปกรณ์ที่เป็นไปไม่ได้!
"GB-K" แตกต่างตรงที่ว่า แหล่งพลังงานทดแทน ทรัพยากรธรรมชาติหมุนเวียนพลังงานอิสระของสภาพแวดล้อมของสูญญากาศทางกายภาพถูกใช้ในรูปแบบของแรงเฉื่อยแรงเหวี่ยงฟรีซึ่งอุปกรณ์แปลงเป็นพลังงานไฟฟ้า
"GB-K" เป็น "GB-1998" ที่ดัดแปลง

รูปที่ 1a, 1b และ 1c แสดง " ตัวควบคุมความเร็วแบบแรงเหวี่ยงแบบนิวเมติกไฮดรอลิก (TsRS)» สำหรับ GB-1998 การออกแบบของหน่วยนี้ตามกฎหมายการอนุรักษ์พลังงานจลน์ของการหมุนและโมเมนตัมเชิงมุมให้เทคโนโลยีการปรับกลไกอัตโนมัติเพื่อรักษาความเร็วในการหมุนคงที่ ต้นแบบของการประดิษฐ์ "pneumohydraulic CRS" เป็นคันโยก "Watt centrifugal speed controller" (รูปที่ 2)

CRS (รูปที่ 1a, 1b และ 1c) ประกอบด้วยโรเตอร์แบบชิ้นเดียวที่มีช่องสำหรับมวลของเหลว: ห้องทรงกระบอก (ตามแกนของการหมุนของโรเตอร์) และห้องเลนติคูลาร์ บอลลูนยืดหยุ่นซึ่งบรรจุก๊าซอัดแรงดันวางอยู่ภายในห้องรูปทรงเลนส์ มันทำหน้าที่เป็นสปริงลม พื้นที่ที่เหลือเต็มไปด้วยของเหลวหนัก
ในเครื่อง " เครื่องกำเนิดไฟฟ้า Bogomolov 1998 (GB-1998)"(รูปที่ 2b) ตัวควบคุมความเร็วแบบแรงเหวี่ยง (รูปที่ 1a, 1b และ 1c) ทำหน้าที่หลัก กำเนิดพลังงานจลน์อิสระของการหมุน (พลังงานกล) ในโหมดการเร่งความเร็วและการชะลอตัวของวัฏจักร (ความรู้ของผู้เขียน) ในอุปกรณ์ "GB" TsRS ในฐานะมู่เล่จะอยู่บนเพลาเดียวกันกับ "เครื่องกำเนิดไฟฟ้า" ของเครื่องจักรไฟฟ้าแบบพลิกกลับได้ (รูปที่ 2b) ระหว่างการทำงานแบบวนรอบในวงจรการเร่งความเร็ว CRS จะถูกสร้างขึ้นโดยมอเตอร์ไฟฟ้า และมู่เล่จะสะสมพลังงานจากการทำงานอิสระของแรงเหวี่ยงหนีศูนย์ ในรอบการเบรกโดยความต้านทานของเครื่องกำเนิดไฟฟ้าภายใต้ภาระ พลังงานไฟฟ้าที่ใช้ไปกับการหมุนของล้อช่วยแรง-CRS โดยมอเตอร์ไฟฟ้า พักฟื้นและพลังงานกลอิสระที่เพิ่มขึ้นของล้อช่วยแรง CRS จะถูกแปลงโดยเครื่องไฟฟ้า (เครื่องกำเนิดไฟฟ้า) ให้เป็นไฟฟ้าฟรี
ในอุปกรณ์ที่ดัดแปลง "GB" ในอุปกรณ์ "GB-K"
หน่วย "ตัวควบคุมความเร็วแบบแรงเหวี่ยงแบบแรงเหวี่ยงแบบนิวเมติก-ไฮดรอลิก (CRS)" ได้รับการปรับเปลี่ยนโครงสร้างสำหรับฟังก์ชันเพิ่มเติม (บวกกับฟังก์ชันการสร้างพลังงานกลแบบเพิ่มหน่วย) กล่าวคือ สำหรับการผลิตไฟฟ้าฟรีของตัวเอง หน่วย CRS เปลี่ยนงานเชิงกลของมู่เล่ให้เป็นศักย์ไฟฟ้าเพิ่มแรงดันไฟฟ้าในวงจรตามหลักการทำงาน (ต้นแบบของการประดิษฐ์) ของอุปกรณ์ที่รู้จักกันดี - "ตัวแปลง" ระบบเครื่องกลไฟฟ้า ตัวแปลงคาปาซิทีฟ (หม้อแปลง) (รูปที่ 4)

TsRS (รูปที่ 3a, 3b และ 3c) ของอุปกรณ์ GB-K ประกอบด้วยโรเตอร์ตัวที่เป็นของแข็งพร้อมช่องสำหรับมวลของเหลว: ห้องทรงกระบอก (ตามแกนของการหมุนของโรเตอร์) และห้องแม่และเด็ก ของเหลวนำไฟฟ้าเคลื่อนที่อย่างอิสระภายในห้องเพาะเลี้ยง
รูปที่ 3a แสดง CRS ที่ไม่มีของไหลทำงานที่เป็นของเหลว รูปที่ 3c แสดงตำแหน่งของอิเล็กโทรดของเหลว (สีเขียว ของเหลวทำงาน) ที่จุดเริ่มต้น แรกวงจรการทำงานของ CRS เป็นคอนเวอร์เตอร์ รูปที่ 3b แสดงตำแหน่งของอิเล็กโทรดของเหลว (สีเขียว สารทำงาน) ที่ส่วนท้าย ที่สองชั้นเชิงของ CRS เป็นตัวแปลง
หลักการทำงานของตัวแปลงต้นแบบของการประดิษฐ์
(ดูความช่วยเหลือที่ท้ายบทความ)
ในตัวแปลงเชิงกลทั่วไป แรงดันไฟฟ้าขาเข้าต่ำยู 1ยู2ในขณะที่กระแสไฟขาออกและกระแสไฟเข้าเท่ากัน กำลังขับเกินกำลังไฟฟ้าอินพุต เอฟเฟกต์การเปลี่ยนแปลงทางกายภาพนี้ (ผลของการเหนี่ยวนำไฟฟ้าสถิต) เกิดขึ้นเนื่องจากการใช้พลังงานของไดรฟ์ภายนอกสำหรับงานเชิงกลในการเคลื่อนย้ายออกจากกัน (เคลื่อนที่) เพลตของตัวเก็บประจุที่มีความจุแปรผันซึ่งมีประจุยู 1ในระยะทางขั้นต่ำ เมื่ออิเล็กโทรดถูกย้ายไปยังระยะทางสูงสุด แรงดันเอาต์พุตจะสูงขึ้นยู2.
อุปกรณ์และหลักการทำงานของตัวแปลงหน่วย TsRS VGB-2011 แตกต่างจากต้นแบบตรงที่:
ตัวเก็บประจุแบบแปรผันที่มีอิเล็กโทรดแบบเพลทถูกแทนที่ด้วยตัวเก็บประจุแบบ "ขวดไลเดน" แบบอะนาล็อก ซึ่งมีอิเล็กโทรดแกนกลางและการชุบอิเล็กโทรดที่สองที่บริเวณรอบนอกของภาชนะ บทบาทของเรือของโถ Leyden ใน GB-2011 ดำเนินการโดยห้องทำงานของ CRS;
แผ่นอิเล็กโทรดโซลิดสเตตแบบเคลื่อนย้ายได้ของตัวเก็บประจุแบบแปรผันต้นแบบถูกแทนที่ใน GB-2011 ด้วยของเหลวที่นำไฟฟ้า อิเล็กโทรดของเหลวสามารถเคลื่อนที่ได้อย่างอิสระจากส่วนกลางของห้องทำงานไปยังบริเวณรอบนอก
หลักการทำงานของตัวแปลง TsRS ในอุปกรณ์ GB-2011 (GB-K)
ในจังหวะแรกการทำงานของคอนเวอร์เตอร์ตามวัฏจักรด้วยการเร่งความเร็วของ CRS ภายใต้การกระทำของแรงเหวี่ยงของความเฉื่อยในห้อง CRS การทำงานทางกลจะดำเนินการเพื่อขจัดแรงดันไฟฟ้าที่มีประจุออกจากกันยู 1อิเล็กโทรด
การเคลื่อนที่ในแนวรัศมีของอิเล็กโทรดของเหลวจากอิเล็กโทรดแกนกลางไปยังรอบนอกของห้องเป็นตัวเก็บประจุที่มีความจุแปรผันได้ แรงดันไฟขาออกที่สูงขึ้น ยู2ที่ระยะห่างสูงสุดระหว่างอิเล็กโทรด ในตำแหน่งนี้ ตัวเก็บประจุจะถูกปล่อยออกสู่โหลดโดยมูลค่าของพลังงานไฟฟ้าอิสระที่เพิ่มขึ้นในรอบแรก
ในเวลาเดียวกันเช่นเดียวกับในรุ่น GB-1998 ในการดัดแปลง GB-2011 ในรอบแรกของการเร่ง CRS พลังงานกลอิสระถูกผลิตและสะสมโดยมวลเฉื่อยของของเหลว. ในรุ่นของโครงการ GB-1998 พลังงานกลของแรงดึงดูดของมวลของของเหลวทำงานของเหลวจากจุดศูนย์กลางไปยังขอบโดยการทำงานอิสระของแรงเหวี่ยงของความเฉื่อยสะสมโดยสปริงนิวแมติก ความแรงของสนามไฟฟ้าสถิต) แรงดึงดูดของมวลอิเล็กโทรดของเหลวของคูลอมบ์ต่ออิเล็กโทรดกลางของตัวเก็บประจุ
ในจังหวะที่สองการทำงานของตัวแปลงในระหว่างการเบรกของ CRS การทำงานอิสระของแรงดึงดูดของคูลอมบ์ อิเล็กโทรดของเหลวจะกลับสู่ตำแหน่งเดิมของระยะห่างขั้นต่ำระหว่างอิเล็กโทรดและตัวเก็บประจุอีกครั้งโดยแหล่งพลังงานภายนอกที่มีแรงดันไฟฟ้ายู 1. รอบสองจังหวะสิ้นสุดแล้ว ตัวแปลงพร้อมสำหรับรอบการทำงานถัดไป
ในเวลาเดียวกันเช่นเดียวกับในรุ่น GB-1998 ในการดัดแปลง GB-2011 เช่นเดียวกับในรอบที่สอง "การเบรกมู่เล่โดยความต้านทานของเครื่องกำเนิดไฟฟ้าภายใต้ภาระ" ซึ่งใช้ในรอบแรกเพื่อหมุนมู่เล่- CRS โดยมอเตอร์ไฟฟ้า พลังงานไฟฟ้าของแหล่งกระแสภายนอก พักฟื้น และพลังงานกลสะสมโดยมวลของไหล เพิ่มขึ้นในรอบแรก แปลงด้วยเครื่องไฟฟ้าแบบพลิกกลับได้(เครื่องกำเนิดไฟฟ้า) ผ่านเพลาร่วมกับระบบทำความร้อนส่วนกลาง (รูปที่ 4) ไฟฟ้าฟรี.
ในตัวแปรของรูปแบบ GB-1998 ในรอบที่สอง พลังงานกลที่สะสมโดยสปริงนิวแมติกถูกใช้ไปกับงานราง มวลชนของเหลวจากขอบไปยังจุดศูนย์กลาง ในรูปแบบ GB-2011 พลังงานกลที่สะสมโดยศักยภาพของความแรงของสนามไฟฟ้าสถิตของคูลอมบ์ก็ถูกใช้ไปกับการเคลื่อนที่ มวลชนของเหลวจากขอบไปยังจุดศูนย์กลาง ในรูปแบบ "GB" ทั้งสองเวอร์ชัน การย้ายมวลของของเหลวทำงานที่เป็นของเหลวจากขอบไปยังจุดศูนย์กลางทำให้เกิดผลกระทบของแรงโคริโอลิสตาม กลิ้งเอง มู่เล่-CRS.
ในรุ่นของโครงการ GB-2011 พลังงานกลที่สะสมโดยศักยภาพของความแรงของสนามไฟฟ้าสถิตของคูลอมบ์ การทำงานของกองกำลังโคริโอลิสกลายเป็น พลังงานจลน์ที่เพิ่มขึ้นของการหมุนมู่เล่-CRS และส่งผ่านเพลาทั่วไป-CRS กับเครื่องกำเนิดไฟฟ้าพลังงานกลของการหมุนของมู่เล่-CRS จะถูกแปลง เป็นไฟฟ้าฟรี
ดังนั้น, การประดิษฐ์ "GB-2011-converter" (การดัดแปลง "GB-1998") สร้างจำนวนฟรีเท่ากัน พลังงานกลของการหมุนมู่เล่-CRS แต่สะสมและแปลงเป็นไฟฟ้าได้อย่างมีประสิทธิภาพมากขึ้น หากใน GB-1998 ส่วนหนึ่งของพลังงานที่ได้รับจากการทำงานของแรงเหวี่ยงฟรีเมื่อถูกใช้โดยตัวสะสมลมถูกใช้เพื่อให้ความร้อนกับก๊าซอัด (ด้วยการแผ่รังสีความร้อนนี้สู่สิ่งแวดล้อมในภายหลัง) เมื่อศักยภาพของ สนามไฟฟ้าสถิตของแรงคูลอมบ์สะสม พลังงานที่สูญเสียไปก่อนหน้านี้จะถูกแปลงโดยตัวแปลงเป็น EMF เมื่อใช้เครื่องกำเนิดไฟฟ้า GB-K ผู้บริโภคจะได้รับกระแสไฟฟ้าฟรีทั้งหมด ซึ่งสร้างร่วมกันโดยเครื่องไฟฟ้าแบบพลิกกลับด้านได้และตัวแปลง
อ้างอิง .
NB : ในการออกแบบ GB-K เฉพาะ สามารถเปลี่ยนเครื่องไฟฟ้าแบบพลิกกลับได้โดยใช้เครื่องกำเนิดไฟฟ้ามอเตอร์ที่มีประสิทธิภาพมากขึ้นในแง่ของประสิทธิภาพ
ทฤษฎีเล็กน้อยเกี่ยวกับตัวแปลงทั่วไป
มีหลายประเภท ตัวแปลงพลังงานโดยใช้ผลตามธรรมชาติของการเหนี่ยวนำไฟฟ้าสถิตซึ่ง เปลี่ยนพลังงานกลเป็นพลังงานไฟฟ้า ผ่าน การเปลี่ยนแปลงความจุตัวเก็บประจุที่มีประจุ สามารถคำนวณพลังงานสำรองของตัวเก็บประจุได้ ด้วยสูตรง่ายๆ W=Q 2/(2C). จากความสัมพันธ์นี้ เราสามารถสรุปได้ว่า ถ้าความจุของตัวเก็บประจุ คเพิ่มขึ้นและค่าใช้จ่ายสะสม คิวยังคงไม่เปลี่ยนแปลง (ไม่เปลี่ยนแปลงเมื่อตัวเก็บประจุถูกตัดการเชื่อมต่อจากแหล่งจ่ายไฟ) พลังงานที่เก็บไว้ในตัวเก็บประจุจะเพิ่มขึ้น นั่นคืออุปกรณ์ทางกลที่ทำงานบนหลักการนี้มีบทบาท เครื่องกำเนิดไฟฟ้ากระแสตรง.
เปลี่ยนความจุตัวเก็บประจุ กลไกเป็นไปได้ในรูปแบบต่างๆ จากสูตรตัวเก็บประจุแบบแบน [ C=eS/d] แสดงว่าความจุขึ้นอยู่กับปริมาณสามปริมาณ: การซึมผ่าน [ อี] อิเล็กทริกระหว่างแผ่น, พื้นที่ผิวด้านหนึ่งของแผ่นเดียว [ ส] และระยะห่างระหว่างแผ่นเปลือกโลก [ d]. การเปลี่ยนค่าพารามิเตอร์เหล่านี้ตั้งแต่หนึ่งค่าขึ้นไปทำให้สามารถเปลี่ยนพลังงานกลเป็นพลังงานไฟฟ้าได้

รูปแสดงแผนผังการทำงานของอุปกรณ์ ทั่วไปตัวแปลง DC เครื่องกลซึ่งใช้สำหรับ บรรลุผลทางเทคนิค มักใช้ในการปฏิบัติงานทางอุตสหกรรมปรากฏการณ์ทางธรรมชาติ ผลกระทบทางกายภาพ "การเหนี่ยวนำไฟฟ้าสถิต».
ในตัวแปลงเชิงกลทั่วไป แรงดันไฟฟ้าขาเข้าต่ำยู 1แปลงเป็นแรงดันไฟขาออกที่สูงขึ้นยู2ในขณะที่กระแสไฟขาออกและกระแสไฟเข้าเท่ากัน ดังนั้น กำลังไฟฟ้าขาออกจะเกินกำลังไฟฟ้าขาเข้า
ในเครื่องแปลงกระแสไฟฟ้าแบบโรตารี่ทั่วไป เมื่ออิเล็กโทรดของโรเตอร์หนึ่งตัวหันไปทางส่วนกราวด์ที่ด้านล่าง พวกมันจะสร้างตัวเก็บประจุที่มีประจุเป็นแรงดันไฟฟ้ายู 1ผ่านหน้าสัมผัสด้านล่างข 1. เมื่อโรเตอร์หมุน อิเล็กโทรดที่มีประจุของโรเตอร์จะเปิดขึ้นพร้อมกับหน้าสัมผัสข 1และเลื่อนขึ้นสู่ตำแหน่งสูงสุด การหมุนนี้ถูกต้านด้วยแรงดึงดูดF rแสดงในรูป เมื่ออิเล็กโทรดที่มีประจุสัมผัสกับหน้าสัมผัสด้านบนข2, เป็นไปได้ที่จะดึงประจุที่บรรทุกโดยมันออกมาภายใต้การกระทำของแรงดันไฟฟ้าที่สูงขึ้น ยู2เนื่องจากระยะห่างจากอิเล็กโทรดที่ต่อลงกราวด์เพิ่มขึ้นและความจุร่วมกันของอิเล็กโทรดลดลง
โรงไฟฟ้า "เครื่องกำเนิดไฟฟ้า Bogomolov - Airlift
หรือเครื่องสูบน้ำ (GB-E)"
ฉันแต่งงานกับความคิดที่จะสร้างแรงกดดันให้เปล่า ( หายาก) แรงเหวี่ยงในรูปแบบ GB ด้วยแนวคิดของโครงการ DA (airlift) ของการแช่ลอยต่ำลงไปที่ด้านล่างหรืองานต้นทุนต่ำ คอมเพรสเซอร์ลิฟต์โดยสาร ที่นี่ GB-E ทำหน้าที่เป็นคอมเพรสเซอร์
เรียกคืนโครงร่างของหน่วย "pneumo-hydraulic CRS" (ดูหมายเหตุเกี่ยวกับ GB-K)

และลองนึกถึงโครงร่างของโรงไฟฟ้า - Airlift (ด้วยเครื่องยนต์ที่ขับของเหลวเข้าสู่การไหลผ่านท่อวงแหวนโดย Archimedean Engine (YES) ซึ่งตัวเหนี่ยวนำถูกพันบนท่อหรือติดตั้งเครื่องกำเนิด MHD) ในโครงการนี้ เครื่องเป่าลม(ดูในรูปที่ 2 กล่อง "การปล่อยอากาศเข้าสู่กระแสน้ำที่ตกลงมา") เราจะเสริม " กล่องวาล์ว"ตามหลักการของหน่วย CRS บน" GB "

พิสูจน์ความสามารถในการทำงานของคอมเพรสเซอร์ LOW-COST ในรูปแบบของ GB - สิ่งนี้เหมือนกันและเรียบง่าย: หน่วยรวมทั่วไป (ลดราคาเสมอ) "เครื่องกำเนิดไฟฟ้า" ในโหมดรอบ "การเบรกโดยโหลดบน เครื่องกำเนิดไฟฟ้า" อย่างสมบูรณ์ พักฟื้น ค่าใช้จ่ายของแหล่งจ่ายไฟภายนอกในวงจรการเร่งความเร็วตามกฎการอนุรักษ์พลังงานจลน์ของการหมุนและโมเมนตัมแม้สำหรับมู่เล่ด้วย มือถือ ในรัศมีของสินค้า ในกรณีของเรา "ตุ้มน้ำหนัก" เหล่านี้เป็นของเหลว
อีกส่วนหนึ่งของการพิสูจน์ประสิทธิภาพของโครงการ MIKST (GB-E) ดังกล่าวก็คือ "ทฤษฎีบท" ของฟิสิกส์ไม่เป็นความจริงอีกต่อไปที่นี่ ตามทฤษฎีบท แรงอาร์คิมีดีน (แรงดันอุทกสถิต) ในจังหวะเจาะ ( จม) ลอย (ฟองอากาศ) ไปที่ด้านล่าง (ถึงความลึกของท่อส่งอากาศ) ควรจะมีการทำงานตอบโต้เสมอ รีเซ็ต งานที่มีประโยชน์ในภายหลัง ป๊อปอัพลอย และถ้าหน่วย CRS "จม" ฟองอากาศ (ลอย) เพื่ออะไร? ท้ายที่สุดแล้ว ไฟฟ้าในจังหวะเร่งความเร็วของมู่เล่ได้รับการพักฟื้นเกือบสมบูรณ์ งานความดันที่ความลึก ในจังหวะเบรก โดยการเปรียบเทียบกับสปริงที่ถูกง้างโดยแรงเหวี่ยงหนีศูนย์กลาง!
ใช่ อุปกรณ์ GB-E ที่ทำงานอิสระของกองกำลังอาร์คิมีดีนในสนามโน้มถ่วงจะกลายเป็นขนาดใหญ่ แต่ราคาถูก! ประการแรกสำหรับการทดลองเดสก์ท็อปราคาถูกก็ทำได้ ประการที่สอง มันจะมีประโยชน์ เพื่อบ่อน้ำลึกหรือสำหรับแท่นขุดเจาะนอกชายฝั่ง เช่น ต้องสูบน้ำมัน อุปกรณ์ยกน้ำสำหรับสูบน้ำดังกล่าวมีประโยชน์มาก น้ำกับตะกอน ในโรงบำบัดน้ำเสียหรือสำหรับยกน้ำจาก พันธุ์แร่ จากเหมือง นั่นคือทุกที่ที่ลิฟต์ทางอากาศทำงานอยู่แล้วในปัจจุบัน แต่ยังคงทำงานราคาแพง และเราให้พวกเขาปีนขึ้นไปโดยไม่เสียค่าใช้จ่าย!
แม้แต่ผู้ผลิตเครื่องสูบน้ำขนาดเล็กแบบจุ่มในครัวเรือนประเภท Malyutka ก็จำเป็นต้องสนใจแนวคิดของ GB-E!
วันนี้มีผู้ผลิตลิฟต์พลาสติกที่มีชื่อเสียงสำหรับโรงบำบัดน้ำเสียในคาร์คอฟและแหลมไครเมีย เหล่านี้คือพันธมิตรที่มีศักยภาพของเรา พวกเขาได้รับการสนับสนุนทางการเงินจากฝ่ายบริหารของเมือง ใครจะเจรจากับพวกเขา เจรจาเกี่ยวกับ GB-E? ฉันลาดเท
แต่แถมยิ่งกว่านั้นอีก!เมื่อใช้ รัศมี กองกำลังอาร์คิมีดีน ตัวเลือก "จากสนามแรงเหวี่ยงของความเฉื่อยถึง เครื่องหมุนเหวี่ยง"ขนาดจะเป็นที่ยอมรับแม้กระทั่งสำหรับมอเตอร์ รถยนต์. รูปแสดงเครื่องหมุนเหวี่ยงแบบแท่นหมุน และสามเหลี่ยมสีขาวจะเป็นกล่องวาล์วคอมเพรสเซอร์ฟรีของ TsRS (จากรูปแบบ GB-E)
ที่นี่แม้แต่แรงผลักดันของ inercoid precessional ก็มองเห็นได้! เช่นเดียวกับ E. Linevich บางทีรถอาจไม่ต้องการเครื่องกำเนิดไฟฟ้า แต่จะมีแรงฉุดลากโดยตรงโดยไม่ต้องใช้ล้อขับ

ดังนั้น วิธีการจับคู่ GB กับ Airlift ก็คือการเปลี่ยนหน่วย TsRS ให้เป็นกล่องวาล์วบายพาสของอากาศที่มีความดันบรรยากาศเป็นแรงดันภายในของไฮโดรสแตติกลึก แก่นแท้: ในจังหวะการเร่งความเร็วที่อยู่ตรงกลางของห้องเพาะเลี้ยง CRS จะเกิดขึ้น หายากฟรีตามข้อกำหนดการออกแบบ สูญญากาศในห้อง CRS มีค่าเท่ากับแรงดันที่ความลึกในท่อส่งลมและแปรผันตามความเร็วในการหมุนของมู่เล่-CRS นี่เป็นความเร็วเชิงมุมขนาดเล็กที่สามารถทำได้ในทางเทคนิค แก่นแท้: TsRS GB-E ทำงานเป็นวงจรแบบแรงเหวี่ยง ปั๊ม(ในวัดแรก)

รูปที่ 4a แสดงช่อง CRS ที่ว่างเปล่าสำหรับ "GB-E" พร้อมระบบวาล์วของเหลวหมายเลข 2 และวาล์วอากาศหมายเลข 1 และ 3

รูปที่ 4b แสดงวงจร "การเร่งความเร็วของการหมุน" ของระบบทำความร้อนส่วนกลาง ซึ่งเป็นคอมเพรสเซอร์ใต้น้ำ ลูกศรสีเขียวแสดง "การขนถ่าย" ของห้องจากน้ำโดยแรงเหวี่ยงและการเติมอากาศในบรรยากาศด้วยลูกศรสีเหลือง แก่นแท้: TsRS GB-E ทำงานเป็นวัฏจักรเป็นปั๊มน้ำแบบแรงเหวี่ยง (ในรอบแรก) และความดันบรรยากาศสร้างรายได้เพิ่มเติมสำหรับการแฮ็ก เติมพื้นที่ว่างจากน้ำ

ในรูปที่ 4c วัฏจักร "การเบรก" ของ CRS เมื่อน้ำนอกเรือที่มีความลึกเต็มห้อง (ลูกศรสีเขียว) และโดยแรงโคลิโอลิสมันจะหมุนเอง (กระบวนการ RECOVERY โดยเครื่องกำเนิดไฟฟ้าที่ใช้ไปในช่วงแรก วนด้วยมอเตอร์) และยังใช้งานได้ฟรีเหมือนใน โครงการมาตรฐาน คอมเพรสเซอร์ การยก อุปกรณ์ "Airlift" หักล้างเลนส์ของอากาศขึ้นไปในท่อส่งลม (หลักการของการขนส่งทางอากาศมีสองหลักการ: "เลนส์โฟม" หรือ "เลนส์ลูกสูบ")
นี่เป็นภาพร่างเบื้องต้น เป็นเพียงหลักการ บางทีในรูปที่ 1 คุณต้องทิ้งสปริงถุงลมนิรภัยยางยืด ... เป็นต้น อาจจำเป็นต้องใช้กระดิ่งอากาศตัวรับเพิ่มเติม สิ่งนี้จะได้รับแจ้งจาก airlifters หากไม่มีผู้เชี่ยวชาญด้านการขนส่งทางอากาศ จะดีกว่าที่จะไม่ทำโมเดลด้วยตัวคุณเอง มีกระบวนการที่ละเอียดอ่อน: โฟมอยู่ที่ไหนและเลนส์อยู่ที่ไหน ... แต่! ฉันรับประกันความสามารถในการใช้งานของ DRIVE ฟรีของของเหลวในสตรีม! ถูกและโกรธ
Afterword ของการเลือกบันทึกย่อ "ผลิตภัณฑ์สปริง 2011"
คุณตรวจดูบันทึกย่อของฉันพร้อมคำอธิบายเกี่ยวกับแผนงานใหม่ที่ฉันเสนอในฤดูใบไม้ผลินี้ ซึ่งถูกกล่าวหาว่าเป็นอุปกรณ์ที่มีความเป็นเอกภาพสูง "เครื่องจักรเคลื่อนที่ถาวรประเภทที่สอง" ระบบอุปกรณ์และระบบพลังงานธรรมชาติของสิ่งแวดล้อม
ดังที่ฉันได้กล่าวไว้ในคำนำของบันทึกชุดนี้ โดยธรรมชาติแล้ว แรงทั้งหมดที่เรารู้จักนั้นเป็นผลมาจากการทำงานของ "เครื่องจักร" ตามธรรมชาติ ซึ่งเป็นงานของกลไกที่สร้างขึ้นโดยธรรมชาติตามหลักการสากลเดียว กล่าวคือ หลักการแลกเปลี่ยนอย่างต่อเนื่อง พลังงานในสภาพแวดล้อมที่เป็นวิธีการ "อัตโนมัติ" การฟื้นฟูสมดุลพลังงานที่ดีที่สุดโดยรวมในกรณีที่มีการละเมิดพารามิเตอร์ในท้องถิ่น " ความหนาแน่นของพลังงานโดยปริมาตร » ในการไล่ระดับความหนาแน่นของพลังงานในแนวรัศมีของที่รู้จักทั้งหมด ทุ่งนาพลังงานศักย์ของอนุรักษ์นิยม กองกำลัง.
ในแผนภาพวงจรที่ฉันคิดค้นขึ้นเพื่อให้คุณสนใจ เครื่องกำเนิดไฟฟ้าถูกใช้เป็นแหล่งพลังงานธรรมชาติฟรี โครงการ อุปกรณ์ของ "เครื่องจักร" เหล่านี้ซึ่งออกแบบโดยธรรมชาติเพื่อใช้การจัดตำแหน่งสมดุลพลังงานของระบบจักรวาล "อัตโนมัติ" ในระบบย่อยนั้นเหมือนกันและเป็นสากล ในสสารวัตถุที่หนาแน่นของจักรวาล (สสารบางของอีเธอร์ สุญญากาศทางกายภาพของสสารขี้เล่นของวัตถุที่เกิดจากสสารบางนี้) มีการก่อตัวในท้องถิ่นซึ่งประกอบด้วยสสารและสนามแรงที่เกิดขึ้น เป็นเรื่องปกติที่จะเรียกสนามพลังดังกล่าวว่า "ทุ่งพลังงานศักย์" และกองกำลังเหล่านี้เป็น "กองกำลังอนุรักษ์นิยม"
ตามที่ผู้เขียนกล่าวว่าความสามัคคีของโครงร่างในการจัดเรียง "เครื่องจักร" ตามธรรมชาติเหล่านี้อยู่ในความจริงที่ว่า "หน่วยกำลัง" ของพวกเขาสำหรับการสำแดงและการดำเนินการตามการทำงานของกองกำลังเป็นหลักการที่กำหนดในขั้นต้นของการไล่ระดับแนวรัศมีของ ความหนาแน่นพลังงานและมวลของสารโดยปริมาตร ใน "หน่วยกำลัง" นี้ ซึ่งเรียกว่า "สนามพลังงานศักย์" เราสามารถกำหนดพื้นผิวศักย์ไฟฟ้าของทรงกลมที่มีระดับความหนาแน่นของพลังงานเชิงปริมาณในกรอบอ้างอิงที่ยอมรับได้
ในรูปแบบของอุปกรณ์ประดิษฐ์ที่เสนอโดยผู้เขียนการทำงานร่วมกันของหน่วยงานของตนเองกับสภาพแวดล้อมทางธรรมชาตินั้นดำเนินการผ่าน OPORA บน การไล่ระดับสี ความหนาแน่นของสสารของตัวกลางในด้านของพลังงานศักย์: ในสนามโน้มถ่วงของมวลของตัวกลาง, ในสนามของแรงดึงดูดของมวลของตัวกลางโดยแรงเฉื่อยของแรงเหวี่ยง, ในด้านของแรงดึงดูด ของมวลของตัวกลางโดยแรงคูลอมบ์ไฟฟ้าสถิต สนามพลังงานที่อาจเกิดขึ้นเหล่านี้เกิดขึ้นจากแรงธรรมชาติระดับปฐมภูมิ และด้วย "หน่วยกำลัง" ของพวกมัน จะสร้างมวลดึงดูดของสารสิ่งแวดล้อมซึ่งเป็นแรงธรรมชาติระดับมัธยมศึกษา "แรงย้อนกลับ" ผ่านการทำงานของกองกำลังฟื้นฟูที่มีการจัดตำแหน่ง "อัตโนมัติ" ของศักย์พลังงานของระบบจะดำเนินการแจกจ่ายกระแสท้องถิ่นของการแลกเปลี่ยนพลังงานสากล
วงจรทั้งหมดสร้างขึ้นโดยใช้อัลกอริทึม "AUM" ที่เสนอโดยผู้เขียน "วิธีสากล" สำหรับการออกแบบ superunits (SE) จัดระเบียบและแจกจ่ายกระแสการแลกเปลี่ยนพลังงานระหว่างสิ่งแวดล้อมและอุปกรณ์เพื่อนำพลังงานส่วนหนึ่งจากการแลกเปลี่ยนนี้ไปใช้
AUM เป็นพันธุ์ที่ ผลที่ตามมาจากเวอร์ชันผู้เขียน "M-Paradigms of Physics"
AUM- การจัดกระบวนการประดิษฐ์ (โดยการเปรียบเทียบกับ TRIZ) และการออกแบบแผนผังไดอะแกรมของอุปกรณ์สำหรับการใช้พลังงานของสนามพลังงานศักย์ - เป็นสูตรดังนี้:
หากมีการใช้พลังงานศักย์ของกองกำลังอนุรักษ์นิยมสองรูปแบบในอุปกรณ์ซึ่งงานที่มีทิศทางตรงกันข้ามของการกระทำของเวกเตอร์ก็จะเป็น LOW-COST เป็นระยะ ๆ ปิด (อ่อนลง) การกระทำของสนาม รูปแบบแรงของพลังงานและการเปิดใช้งาน (การเสริมกำลัง) การกระทำของสนามพลังของพลังงานรูปแบบอื่นมันเป็นไปได้ (!) ในเวลาและพื้นที่เพื่อสร้าง ความแตกต่างในเชิงบวกพลังแห่งการกระทำของกองกำลังเหล่านี้เพื่อขจัดสิ่งนี้ ความแตกต่างของอำนาจกล่าวคือเพื่อให้ได้พลังงานที่มีประโยชน์แก่ผู้ใช้พลังงานอิสระ นักประดิษฐ์สามารถทำได้โดยการเลือกเอฟเฟกต์ทางกายภาพที่รู้จัก
การใช้ AUM ซึ่งเป็นเทคนิคทั่วไปที่สุดของนักออกแบบอุปกรณ์ CE ต้องการให้ผู้เขียนใช้ความพยายามอย่างสร้างสรรค์ในแต่ละรูปแบบ ราคาถูก ปิดการใช้งาน (อ่อนตัวลง) การกระทำของหนึ่งในกองกำลังต่อต้านตามธรรมชาติในอุปกรณ์
ดังนั้นในการประดิษฐ์ "EMGDG" (สิทธิบัตร RF เลขที่ 2396681) หลักการทำงานซึ่งรวมถึง กล่าวถึงในบันทึกแรก "อะไรอีก ... ", ราคาถูกวิธีการ "จม" ลอย (การอ่อนกำลังของกองกำลังอาร์คิมีดีน) พบได้ในผลกระทบทางกายภาพ: "ค่าของแรงโน้มถ่วงต่อมวลควบคุมเปลี่ยนแปลงไประหว่างการเคลื่อนที่ในแนวตั้งพร้อมกับกรอบอ้างอิง"
เช่นเดียวกับตัวแปร EMGDG ในด้านแรงเหวี่ยงหนีศูนย์กลาง ซึ่ง "ขนาดของแรงกระทำของแรงเหวี่ยงหนีศูนย์กลางต่อมวลควบคุมเปลี่ยนแปลงไประหว่างการเคลื่อนที่ในแนวรัศมีพร้อมกับกรอบอ้างอิง"
การค้นหาแบบเดียวกันนี้ใช้ในโครงการ "Archimedean Steam Engine-airlift" และในรูปแบบ "GB-E"
ในกระแสน้ำวน Arsentiev สำหรับเครื่องยนต์ไอน้ำอาร์คิมีดีน พบวิธีเพิ่มพลังอีกวิธีหนึ่งเนื่องจากการทำงานของแรงดันไฮโดรสแตติก
ในสมมติฐานเกี่ยวกับหลักการทำงานของเคล็มมอเตอร์ ราคาถูกการกระทำของแรงเหวี่ยงหนีศูนย์กลางลดลงเป็นวัฏจักรโดยวิธีทางเทคนิคของการใช้วัฏจักรความร้อนคาร์โนต์ ซึ่งเกิดขึ้นได้จากการใช้พลังงานภายในแบบเป็นวงกลมของการขยายตัวแบบอะเดียแบติกของของเหลวและการระบายความร้อนด้วยสภาพแวดล้อมภายนอก
ในอุปกรณ์ของตระกูล Bogomolov Generator, GB-1998, GB-K, GB-E ราคาถูกวิธีการปิดการใช้งานการกระทำของแรงเหวี่ยงเพื่อสร้างพลังงานจลน์อิสระของการหมุน (พลังงานกล) ทำได้โดยการตั้งค่าโหมดการเร่งความเร็วแบบวงกลมและการชะลอตัวของหน่วยล้อช่วยแรง CRS GB- ฟังก์ชันนี้ดำเนินการโดยแรงดันอุทกสถิตลึก ได้แก่ ยังออกแบบวิธีการทำให้อ่อนลง (ปิด) การกระทำของหนึ่งในสองกองกำลังที่เป็นปฏิปักษ์
ฉันอยากจะสรุปด้วยคำว่า "สิ่งที่ต้องพิสูจน์!" แต่น่าเสียดายที่ไม่มีแบบจำลองการทำงานของอุปกรณ์ที่ประดิษฐ์ขึ้น "คำนำ" และ "คำหลัง" ทั้งหมดเหล่านี้ยังคงเป็น "โต๊ะเครื่องแป้ง"
ฤดูหนาวผ่านไป ฤดูร้อนมาถึงแล้ว ขอบคุณปาร์ตี้สำหรับสิ่งนี้!
บทที่ 4 แรงเหวี่ยง
อย่างที่คุณทราบสำนักงานสิทธิบัตรของรัสเซียไม่ยอมรับคำขอรับสิทธิบัตรหากอธิบายถึง "การเคลื่อนไหวเนื่องจากกำลังภายใน" สิ่งนี้ถูกต้อง แต่เราต้องไม่ลืมว่าร่างกายทั้งหมดมีปฏิสัมพันธ์อย่างต่อเนื่องและแลกเปลี่ยนพลังงานกับอีเธอร์ และปรากฏการณ์ของความเฉื่อยมีลักษณะทางอีเธอร์ไดนามิก ในบทนี้ เราจะพิจารณาวิธีแก้ปัญหาง่ายๆ หลายประการที่ช่วยให้คุณเคลื่อนไหวผ่านการโต้ตอบกับสภาพแวดล้อมที่ไม่มีตัวตนโดยรอบ
ในนิตยสาร Cassier เล่มที่ 29 ในปี 1906 มีการแสดงแผนหลายอย่างซึ่งควรใช้เรขาคณิตพิเศษของโรเตอร์เพื่อสร้างแรงดันภายในที่ไม่สมมาตรของก๊าซหรือตัวกลางยืดหยุ่นอื่น ๆ ที่เกิดขึ้นเมื่อหมุน โปรดทราบว่า Louis Cassier ในช่วงปี พ.ศ. 2434-2456 (มากกว่ายี่สิบปีติดต่อกัน) ได้ตีพิมพ์บทความที่น่าสนใจเกี่ยวกับการพัฒนาเทคโนโลยี ต้องขอบคุณเขาที่ทำให้พวกเรารู้จักความคิดมากมายของนักประดิษฐ์ในสมัยนั้น คลังวารสารของเขาเป็นภาษาอังกฤษฟรีสามารถพบได้บนอินเทอร์เน็ต รูปแบบที่แสดงในรูปที่ 28 ตามข้อมูลจาก Cassier's Magazine ที่เสนอต่อสาธารณชนในปี 1902
ข้าว. 28. โรเตอร์เต็มไปด้วยก๊าซหรือตัวกลางยืดหยุ่นอื่น ๆ
องค์ประกอบของร่างกายทั้งสี่ (คาน) แต่ละชิ้นมีวาล์วสำหรับสูบลมหรือก๊าซบางส่วนเข้าไป อุปกรณ์ไม่เริ่มหมุนด้วยตัวเอง ในการเริ่มต้นจะต้องหมุนด้วยมือ เรายังไม่รู้จักผู้เขียนสิ่งประดิษฐ์นี้ โครงการนี้มีแนวโน้มดีและไม่มีความคล้ายคลึงกันในแง่ของความเรียบง่ายในการออกแบบ
พิจารณาเงื่อนไขในการสร้างแรงบิด สมมติว่ามีก๊าซอยู่ใน "คาน" ทั้งสี่ของร่างกายหรืออย่างอื่น ร่างกายทำงานยืดหยุ่น,มีมวลเฉื่อย สิ่งสำคัญในที่นี้คือปัจจัยความยืดหยุ่นของของไหลทำงาน ซึ่งจะถูกบีบอัดอย่างไม่สม่ำเสมอภายใต้การกระทำของแรงเหวี่ยงหนีศูนย์กลาง ในสถานการณ์เช่นนี้ของไหลที่ไม่สามารถบีบอัดได้จะไม่ให้ผลตามที่คาดหวัง เนื่องจากจะดันไปทุกทิศทางด้วยแรงเดียวกัน น้ำยาทำงานแบบยืดหยุ่นกดทับบนตัวเรือนได้ไม่เท่ากัน ส่วนใหญ่ตามรัศมีการหมุน
แผนภาพเวกเตอร์แสดงในรูปที่ 29 ซึ่งมีการระบุว่ามีองค์ประกอบสัมผัสซึ่งกำหนดการหมุนของโรเตอร์ของเครื่อง
ข้าว. 29. โครงการที่มีตำแหน่งของเวกเตอร์แรง
จากการพิจารณาเวกเตอร์ที่แสดงในรูปที่ 29, สามารถสันนิษฐานได้ว่า "มวลการทำงาน" ที่ยืดหยุ่นได้ซึ่งบีบอัดได้จะกดที่ด้านสัมผัสของร่างกายด้วยแรงมากกว่าบนรัศมีซึ่งจะสร้างแรงบิดและความเร่งคงที่ของโรเตอร์
ความสามารถในการใช้งานของโครงการนี้สามารถพิสูจน์ได้โดยการมีอยู่ในตัวกลางยืดหยุ่นรอบ ๆ ของปฏิกิริยาต่อการเสียรูปของร่างกายการทำงานที่ยืดหยุ่น ในกรณีนี้ แรงบิดบนเพลาของอุปกรณ์นี้จะต้องเทียบเท่ากับผลของ "การบิด" ตัวกลางที่ไม่มีตัวตนโดยรอบในพื้นที่การทำงานของอุปกรณ์นี้
ให้ฉันเปลี่ยนวงจรที่แสดงในรูปที่ 29 และเสนอ "คาน" เพิ่มเติม, รูปที่. 30. สิ่งนี้ไม่สำคัญ แต่พื้นผิวที่ "มีประโยชน์" ของลำตัวกลวงซึ่งสร้างองค์ประกอบสัมผัสของแรง เพิ่มขึ้นในการออกแบบนี้ ฉันหวังว่าคุณจะคุ้นเคยกับสัญลักษณ์ Old Slavonic ของดวงอาทิตย์
ข้าว. 30. โรเตอร์ 8 คาน
อุปกรณ์ที่แสดงในรูป 31 ฉันเสนอให้ใช้งานจริงในด้านการจ่ายไฟและการขับเคลื่อนของระบบการบินและอวกาศ
ข้าว. 31. องค์ประกอบโรเตอร์ของ Frolov แสดงส่วนประกอบในแนวแกนและแนวสัมผัสของแรง
ในกรณีนี้ เราสามารถคาดหวังการปรากฎของแรงไม่เพียงแต่องค์ประกอบสัมผัสของแรง แต่ยังรวมถึงองค์ประกอบตามแนวแกนด้วย การมีอยู่ของส่วนประกอบในแนวแกนทำให้สามารถรับแรงขับเคลื่อน (ยก) ในแนวแกนได้
ในรูป 32 แสดงรูปลักษณ์ของโรเตอร์ซึ่งผลิตจากจานแข็งซึ่งต้องการการกัดของโพรงสามเหลี่ยม (ในกรณีธรรมดา) สำหรับ "มวลการทำงาน" ที่ยืดหยุ่นและอัดได้ แน่นอนว่าจำเป็นต้องมีฝาปิดสุญญากาศอีกสองฝา เป็นไปได้ที่จะทำการกัดด้วยความเอียงตามแกนของการหมุน (ตามแนวคิดที่แสดงในรูปที่ 91) เพื่อให้ได้มาซึ่งไม่เพียงแต่แนวสัมผัส แต่ยังรวมถึงองค์ประกอบในแนวแกน (การยก) ของแรงขับเคลื่อนด้วย
ข้าว. 32. โรเตอร์ที่มีการกัดโพรง
แนวคิดนี้เป็นจินตนาการของ "การขับเคลื่อนด้วยกำลังภายใน" หรือเป็นเทคโนโลยีที่มีประโยชน์จริงหรือไม่? คำถามเกี่ยวกับประสิทธิภาพของแนวคิดที่แสดงในรูปที่ 28 - มะเดื่อ สามารถตรวจสอบ 32 ในทางปฏิบัติ เนื่องจากการออกแบบเหล่านี้เรียบง่าย และมีตัวเลือกมากมายสำหรับการเลือกมวลเฉื่อยทำงานที่ยืดหยุ่นได้ เสนอให้ทำการทดลองร่วมกัน ขอรับสิทธิบัตร และเริ่มผลิตแหล่งพลังงานโดยใช้เทคโนโลยีนี้
โดยการเผยแพร่แนวคิดเหล่านี้ ฉันถือว่าประสบความสำเร็จในเชิงพาณิชย์ และควรมีส่วนร่วมด้วย การพัฒนาโครงการเพิ่มเติมขึ้นอยู่กับความสามารถในการผลิตของคุณ ในการเริ่มต้น เราจำเป็นต้องมีโรงงานนำร่องขนาดเล็กเพื่อสำรวจปัจจัยหลักในการปรับปรุงเทคโนโลยีนี้ในระหว่างงานพัฒนา และค้นหาวิธีปรับใช้ให้เกิดประโยชน์สูงสุดในกระบวนการผลิตจำนวนมาก สำหรับรายละเอียดเพิ่มเติม เรื่องนี้และโครงการอื่นๆ ได้แสดงไว้ในหนังสือของฉัน New Space Technologies, 2012
ไปที่เครื่องจักรแบบแรงเหวี่ยงที่มีเอฟเฟกต์ไอพ่นซึ่งก็คือความคล้ายคลึงของกังหันของนกกระสาแห่งอเล็กซานเดรีย โครงการแสดงในรูปที่ 33. ในบทความ "นิวเมติก" ประมาณ 120 ปีก่อนคริสตกาล Heron อธิบายเครื่องจักรต่าง ๆ ที่ขับเคลื่อนด้วยอากาศอัดหรือไอน้ำเนื่องจากเอฟเฟกต์ปฏิกิริยา ตัวอย่างเช่น "aeolipyle" ของ Heron เป็นกังหันไอน้ำเครื่องแรกในรูปแบบของลูกบอลซึ่งหมุนโดยแรงของไอพ่นไอน้ำที่ปล่อยออกมาภายใต้แรงดันสูงจากหัวฉีดที่อยู่ในตำแหน่งสัมผัส
ข้าว. 33. กังหันของนกกระสาแห่งอเล็กซานเดรีย
กังหัน Heron ใช้แรงดันไอน้ำ เช่น ไอน้ำสมัยใหม่และเครื่องจักรกังหันแก๊สอื่นๆ ที่ใช้พลังงานสมัยใหม่เป็นฐาน "แรงดันไอน้ำ" - คำพูดสำคัญเหล่านี้ติดอยู่ในใจของวิศวกรไฟฟ้าและคนขับรถจักรทุกคน ในการสร้างแรงดัน คุณต้องให้ความร้อนกับน้ำ นั่นคือ เผาก๊าซ ถ่านหิน น้ำมันเชื้อเพลิง จากนั้นกังหันของเครื่องกำเนิดไฟฟ้าจะหมุน สุภาพบุรุษแห่งพลังงาน คุณกำลังถูกหลอก! แรงดันที่เกิดจากแรงเหวี่ยงหนีศูนย์นั้นถูกสร้างขึ้นโดยไม่ใช้เชื้อเพลิงซึ่งแทบไม่มีประโยชน์เลย! สิ่งนี้รู้กันมานานนับพันปีแล้ว แต่คุณไม่เคยมีใครบอก หรือคุณลืมมัน
ราวปี ค.ศ. 1760 โยฮันน์ แอนเดรียส ฟอน เซกเนอร์ เป็นผู้ประดิษฐ์เครื่องยนต์โดยอิงจากการกระทำของกระแสน้ำไหล (โยฮันน์ อันเดรียส ฟอน เซกเนอร์). Segner ไม่ได้ตั้งตัวเองทำงานเพื่อให้ได้เครื่องจักรที่ทำงานอัตโนมัติ เขาใช้วิธีการใช้แรงเหวี่ยงหนีศูนย์กลางเพื่อเร่งโรเตอร์ของโรงสีน้ำ ซึ่งเป็นเครื่องจักรที่สร้างงานที่มีประโยชน์เมื่อมีการจ่ายกระแสน้ำจากภายนอกมายังโรงสี อย่างไรก็ตาม แก่นแท้ของความคิดของเขาก็คือ พลังของเครื่องไม่ได้ขึ้นอยู่กับพลังงานจลน์ของการไหลของน้ำเท่านั้น ในเครื่องดังกล่าว แรงดันเจ็ทที่ทางออกสามารถสร้างขึ้นได้ เนื่องจากจะเพิ่มขึ้นตามความเร็วของโรเตอร์ที่เพิ่มขึ้น: แรงเหวี่ยงหนีศูนย์กลางจะเร่งมวลการทำงาน และสร้างผลกระทบของแรงดันลบ (สูญญากาศ) ที่ช่องทางไหลเข้าไปยังโรเตอร์ . แรงดันตกคร่อมกำลังเพิ่มขึ้น ทำให้เกิดพลังงานส่วนเกิน เครื่องแรงเหวี่ยงที่เสนอจำนวนมากนั้นใช้หลักการทั่วไปของ "ล้อ Segner" โหมดการหมุนตัวเองของล้อ Segner ที่ "ทันสมัย" สามารถจินตนาการได้ง่ายๆ ดังแสดงในรูปที่ 34.
ข้าว. 34. Segner โรเตอร์ น้ำเข้าทางแกนหมุน
ความแตกต่างที่สำคัญ ประการแรก โดยมีเงื่อนไขว่า ระบบปิดผนึกและน้ำเข้าสู่โรเตอร์ด้วยตัวเองเนื่องจากแรงดันตก และไม่ได้ถูกปั๊มโดยปั๊ม โรเตอร์ดังกล่าวจะเร่งตัวเองได้ตราบเท่าที่น้ำเข้าสู่โรเตอร์ การไหลของน้ำที่อยู่ตรงกลางตามแนวแกนจะเคลื่อนที่ด้วยความเร็วต่ำกว่าที่ทางออก ดังนั้นหน้าตัดของท่อที่ทางเข้าจะต้องมากกว่าส่วนตัดขวางทั้งหมดของหัวฉีดทั้งหมด โปรดทราบว่านอกเหนือจากแรงบิดแล้วยังมีการสร้างเอฟเฟกต์คู่ในการออกแบบ - แรงขับตามแนวแกน
ความละเอียดอ่อนที่สร้างสรรค์อีกประการหนึ่ง - ของเหลวทำงานต้องอัดได้. อัลกอริธึมรวมถึงเฟสของการบีบอัดเนื่องจากแรงเหวี่ยงหนีศูนย์กลางและการขยายตัว ในขณะที่พลังงานจลน์เพิ่มเติมปรากฏขึ้นในระบบเนื่องจากการปลดปล่อยพลังงานศักย์ของการบีบอัด เราสามารถใช้พลังงานจลน์ของกระแสที่เพิ่มขึ้นบนใบพัดกังหันหรือในอีกทางหนึ่ง เพื่อให้เป็นไปตามเงื่อนไขเหล่านี้ จำเป็นต้องปล่อยให้น้ำเร่งความเร็วระหว่างการเคลื่อนที่อันเนื่องมาจากอิทธิพลของแรงเหวี่ยงหนีศูนย์กลาง นักทฤษฎีเรียกวิถีการเคลื่อนที่ที่ดีที่สุดของมันว่าเกลียวลอการิทึมของรัศมีแปรผัน ดังแสดงในรูปที่ 35.
ข้าว. 35. เกลียวลอการิทึม
ปั๊มและพัดลมแบบแรงเหวี่ยงสมัยใหม่บางรุ่นมีการออกแบบของใบมีดหรือวิถีการเคลื่อนที่ของมวลการทำงานอยู่แล้ว ดังนั้นจึงมีประสิทธิภาพมาก ในเวอร์ชันที่เรียบง่าย การเคลื่อนที่ของมวลน้ำตามแนวเกลียวแบนหรือรูปกรวยที่มีรัศมีเพิ่มขึ้นจะทำให้น้ำสามารถเร่งความเร็วและสร้างแรงบิดเพิ่มเติมให้กับโรเตอร์ได้
บางทีการใช้อากาศเป็นมวลทำงานอาจจะง่ายกว่า แต่เบากว่ามาก ดังนั้นความเร็วในการหมุนจะสูงขึ้นมาก และสิ่งนี้จะต้องใช้การผลิตชิ้นส่วนเครื่องจักรที่หมุนได้คุณภาพสูงและการแปรรูป (การขัดเงา) ของร่างกาย ในทางทฤษฎี ทุกอย่างไม่ได้ซับซ้อนมากนัก
ลองพิจารณาตัวอย่างที่มีชื่อเสียงและน่าเชื่อถือที่สุดของการใช้งานอุปกรณ์ทางเทคนิคที่ทำงานตามหลักการเหล่านี้: มอเตอร์ Clem ซึ่งใช้แรงเหวี่ยงหนีศูนย์กลางในการหมุนตัวเอง ในปี 1972 Richard Clem ทำงานเป็นพนักงานควบคุมเครื่องจักรกลหนักในเมืองดัลลาส สหรัฐอเมริกา เขาสังเกตเห็นว่าสปริงเกลอร์แอสฟัลต์ร้อนแบบธรรมดายังคงหมุนต่อไปอีกหนึ่งชั่วโมงหลังจากปิดไดรฟ์ แกนของเครื่องดังกล่าวเป็นแนวตั้งและโรเตอร์มีรูปทรงกรวย Klemm ไม่รู้ทฤษฎีนี้ เขาเริ่มศึกษาประเด็นนี้โดยสังเกต และสร้าง "เคล็มมอเตอร์" ที่หมุนได้เอง ในรูป 36 แสดงแผนผังของเครื่องกำเนิดไฟฟ้าที่สามารถใช้แรงเหวี่ยงหนีศูนย์กลางเพื่อเคลื่อนมวลของเหลวไปตามเส้นทางการขยายรูปกรวย
ข้าว. 36. ตัวแปรของแผนภาพวงจรของเครื่องกำเนิด Clem
นี่ไม่ใช่แบบแผนดั้งเดิมของ Clem แต่แตกต่างไปจากการดำเนินการตามความคิดของเขาอย่างสร้างสรรค์ ในรูป 37 แสดงไดอะแกรมอื่นของการออกแบบนี้ โรเตอร์ทรงกรวยวางอยู่ในตัวเรือนทรงกรวยและมีช่องเกลียวที่ตัดเข้าไป เส้นทางเกลียวเหล่านี้วิ่งไปตามกรวยและสิ้นสุดที่ฐานในรูปของหัวฉีด (หัวฉีด) คำแนะนำของนักทฤษฎีและผู้ปฏิบัติงานในการสร้างโครงสร้างที่คล้ายกันคือจำเป็นต้อง "ให้โอกาสแก่ของเหลวในการหยั่งราก" เนื่องจากแรงเหวี่ยงหนีศูนย์กลางกระทำต่อมัน
ข้าว. 37 หลักการทำงานของไดรฟ์ Clem ตัวเลือกการออกแบบ
ในการทำเช่นนี้เกลียวควรมีระยะห่างเพิ่มขึ้นด้วยรัศมีที่เพิ่มขึ้นและควรเพิ่มส่วนตัดขวางของช่องที่ของเหลวไหลผ่านเมื่อเข้าใกล้หัวฉีด สิ่งนี้ไม่ได้ระบุไว้ในบทความเกี่ยวกับเครื่องยนต์ Clem แต่ถูกสันนิษฐานในทางทฤษฎี
ท่อเกลียวซึ่งมวลของเหลวทำงานเคลื่อนตัว โดยมีระยะพิทช์และหน้าตัดเพิ่มขึ้นเมื่อรัศมีการหมุนเพิ่มขึ้น เรียกว่า "เขาละมั่ง"
มีหลายปัจจัยที่นี่ ประเด็นไม่ได้อยู่ที่เอฟเฟกต์ Segner แบบรีแอกทีฟเท่านั้น ความเร่งของของไหลที่เคลื่อนที่เป็นเกลียวซึ่งมีปฏิสัมพันธ์กับโรเตอร์ทำให้เกิดการถ่ายโอนแรงบิดไปยังโรเตอร์ ที่ทางเข้าสู่โรเตอร์ ความเร็วของของเหลวเท่ากับความเร็วของการหมุนของโรเตอร์ ในส่วนของวิถีโคจรด้านหน้าหัวฉีด ของเหลวจะเคลื่อนที่เร็วกว่าโรเตอร์ (ความเร็วที่เพิ่มขึ้นเป็นผลมาจากแรงเหวี่ยง) ดังนั้นโรเตอร์จะเร่งความเร็วและด้วยความเร็วในการหมุนที่แน่นอนสามารถปิดไดรฟ์ภายนอกและเครื่องจะสลับไปที่โหมดเครื่องกำเนิดพลังงาน เพื่อการใช้พลังงานจลน์ของเจ็ตอย่างเหมาะสมหลังจากออกจากหัวฉีด แนะนำให้ใช้ตัวสะท้อนแสงแบบเอียงในการออกแบบ - ใบพัดของใบพัดกังหัน
ดังนั้นในการออกแบบนี้มีสามประเด็นสำคัญ:
1. เอฟเฟกต์ Segner แบบรีแอกทีฟจะเร่งความเร็วของโรเตอร์
2. การเร่งความเร็วของของไหล หากเป็นไปได้ที่จะเพิ่มรัศมีของการเคลื่อนที่ภายใต้การกระทำของแรงเหวี่ยงหนีศูนย์กลาง จะนำไปสู่ความจริงที่ว่ามันเคลื่อนที่ได้เร็วกว่าโรเตอร์และให้แรงบิดเพิ่มเติม
3. ปฏิกิริยาโต้ตอบของมวลน้ำซึ่งไหลออกจากหัวฉีดแล้วและ "ทำงาน" โดยที่ใบพัดกังหันจับจ้องอยู่ที่โรเตอร์ช่วยเพิ่มความเร็วในการหมุน
Richard Clem สร้างเครื่องจักรที่ใช้น้ำมันมะกอกที่บริโภคได้ของ Mazola เนื่องจากของเหลวระหว่างการทำงานนั้นร้อนมาก (สูงถึงประมาณ +150 องศาเซลเซียส) และน้ำก็เดือด บางทีต้องใช้น้ำมันด้วยเพราะของเหลวนี้มีความยืดหยุ่นมากกว่าน้ำ ในการออกแบบที่แท้จริงของ Clem ของไหลถูกบังคับเข้าสู่เพลากลวงที่แรงดันในช่วง 300–500 psi (21–35 กก./ซม.2) ไหลผ่านช่องขดลวดที่แน่นของกรวย และออกทางหัวฉีด ทำให้กรวยหมุน ความเร็วในการหมุนของเพลาในการออกแบบของ Clem ถึง 2300 รอบต่อนาที เพื่อทำให้ของเหลวทำงานเย็นลง มีการใช้เครื่องแลกเปลี่ยนความร้อน (หม้อน้ำ)
เป็นที่ทราบกันดีอยู่แล้วว่ามอเตอร์ตัวแรกไม่สามารถรับน้ำหนักได้และทรุดตัวลง Clem ทำให้เครื่องยนต์รุ่นที่สองมีความทนทานมากขึ้น ในรุ่นนี้ มอเตอร์มีกำลังประมาณ 350 แรงม้า และหนักประมาณ 90 กก.
ริชาร์ดใส่มอเตอร์ลงในรถและสาธิตการทำงานระหว่างเดินทาง แบตเตอรี่ถูกใช้เพื่อสตาร์ทเครื่องยนต์และไฟหน้ารถเท่านั้น ตามที่ผู้เขียนของการประดิษฐ์ โรงไฟฟ้า "ประกอบด้วยปั๊มเจ็ดขั้นตอน (ปั๊มเจ็ดขั้นตอน) และตัวแปลง" ตามที่ผู้เขียนอธิบาย ปั๊มนี้ใช้เพื่อ "จ่ายน้ำมันภายใต้แรงกดดันจากการจัดเก็บไปยังตัวแปลง ซึ่งพลังงานถูกแปลงเป็นแรงเพียงพอที่จะหมุนมอเตอร์ได้" น้ำมันกลับคืนสู่ถัง และวัฏจักรการเคลื่อนที่ของของไหลทำงานยังคงดำเนินต่อไปอีกครั้ง ตัวแปลงซึ่งก็คือตัวแปลงพลังงานทำหน้าที่เหมือนกังหัน แต่ "ไม่ใช่กังหันในความหมายปกติของคำ" ตามที่ Clem กล่าว
ข้าว. 38. ทางซ้ายของรูปภาพ: รายละเอียดของการออกแบบดั้งเดิม ขวา - รุ่นคอมพิวเตอร์
นักประดิษฐ์แสวงหาการสนับสนุนในแวดวงการเงินและอุตสาหกรรม ซึ่งทำให้เชื่อได้ง่ายถึงประโยชน์ของเทคโนโลยีนี้ เขาเคยกล่าวไว้ว่าหากอุตสาหกรรมยานยนต์ยอมรับสิ่งประดิษฐ์ใหม่ของเขา ผู้ขับขี่สามารถเปลี่ยนน้ำมันเครื่องได้ทุกๆ 150,000 ไมล์เท่านั้น แต่ไม่เคยซื้อน้ำมันในระหว่างนั้น
เครื่องยนต์ของ Clem ได้รับการทดสอบโดย Bendix Corporation การทดสอบประกอบด้วยการเชื่อมต่อเครื่องยนต์กับไดนาโมมิเตอร์เพื่อวัดกำลังที่เกิดจากเครื่องยนต์ในโหมดหมุนได้เอง เขาให้ออก 350 แรงม้าอย่างต่อเนื่อง 9 วันติด ซึ่งทำให้วิศวกรของ Bendix ประหลาดใจ จากนั้น Richard Clem ได้รับคำสั่งอย่างจริงจังจากบริษัทถ่านหินสำหรับการผลิตเครื่องจักรอันทรงพลังหลายเครื่อง แต่เสียชีวิตอย่างกะทันหันด้วยอาการหัวใจวาย
รายละเอียดของประวัติการประดิษฐ์นี้มีอยู่ในหน้า KeelyNet ของ Jerry Decker ที่อยู่ของไซต์ของเขาคุ้นเคยกับฉันมาเป็นเวลานานฉันแนะนำให้คุณศึกษาหัวข้อโดยละเอียด: www.keelynet.com
ทฤษฎีของเครื่องจักรแรงเหวี่ยงเชิงกลที่สามารถทำงานในโหมดหมุนได้เองนั้นจำเป็นต้องศึกษาอย่างจริงจัง โดยทั่วไปแล้ว เราสามารถพูดได้ว่าแรงเหวี่ยงหนีศูนย์กลางและผลกระทบเฉื่อยอื่นๆ เป็นของสาขาอีเทอโรไดนามิกส์ ความเฉื่อยเป็นคุณสมบัติของสิ่งแวดล้อมรอบ ๆ ร่างกาย เหล่านี้เป็นแรงภายนอก ไม่ใช่แรงภายในของระบบปิด เช่นเดียวกับแอโรไดนามิก เมื่อมีแรงดันไล่ระดับของตัวกลาง ในระบบเปิดดังกล่าว แรงขับเคลื่อนหรือแรงยกจะถูกสร้างขึ้น และในบางกรณี ทั้งสองส่วนประกอบ
ในเวอร์ชันที่ง่ายที่สุด แรงเหวี่ยงจะสร้างพลังงานศักย์ของร่างกายเพิ่มขึ้น โดยไม่ต้องใช้พลังงานจากแหล่งหลัก และงานของนักออกแบบไม่เพียงแต่จะ "ปลดปล่อย" มวลการทำงานและปล่อยให้เคลื่อนที่ไปตาม แนวการกระทำของแรงเหวี่ยงหนีศูนย์กลาง แต่ในขณะเดียวกันก็ใช้พลังงานจลน์อย่างมีประสิทธิภาพ
หัวข้อนี้มีแนวโน้มที่ดี เนื่องจากด้วยการผลิตจำนวนมากแบบต่อเนื่อง เครื่องจักรดังกล่าวจึงกลายเป็นแหล่งพลังงานที่เรียบง่าย เชื่อถือได้ และราคาไม่แพงที่ใช้กันอย่างแพร่หลาย ปัจจุบันในปี 2555 เรากำลังดำเนินการสร้างเครื่องแปลงพลังงานแบบแรงเหวี่ยง-กระแสน้ำวน ขึ้นอยู่กับเครื่องยนต์ Schauberger รายงานการวิจัยพร้อมแล้วกับการคำนวณกำลังไฟฟ้า และชุดเอกสารประกอบสำหรับการผลิตไดรฟ์ขนาด 30 กิโลวัตต์ รายละเอียดเกี่ยวกับเว็บไซต์ www.faraday.ru และ http://alexfrolov.narod.ru
พิจารณาไม่น้อยไปกว่าเครื่องยนต์ Clem และก่อนหน้านี้คือเครื่องกำเนิดพลังงาน Schauberger ที่หมุนได้เอง ไม่ใช่หน้าที่ของเราที่จะต้องพิจารณาวิธีสร้างแรงขับเคลื่อนแบบแอคทีฟ (ไม่ทำปฏิกิริยา) ซึ่งใช้ในการออกแบบเครื่องบิน เราจะพิจารณาการประดิษฐ์ของ Viktor Schauberger ว่าเป็นโซลูชันทางเทคนิคที่เป็นประโยชน์จริงสำหรับการพัฒนาแหล่งพลังงานใหม่เท่านั้น อย่างไรก็ตาม เราสังเกตว่าส่วนประกอบทั้งสองของแรงขับเคลื่อน (ในแนวแกนและแนวดิ่ง) ทำให้สามารถใช้เครื่องจักรดังกล่าวทั้งเป็นแหล่งพลังงานและเป็นอุปกรณ์ขับเคลื่อนแบบแอ็คทีฟ (ไม่ทำปฏิกิริยา) สำหรับเครื่องบินหรือการขนส่งอื่นๆ เช่น สำหรับการขนส่งทางอากาศ ทางทะเล แม่น้ำ ทางถนน หรือทางรถไฟ
ประวัติของนักประดิษฐ์ Viktor Schauberger นั้นน่าสนใจมาก โดยเฉพาะอย่างยิ่งเพราะเขาพบหลักการทั้งหมดของเครื่องจักรของเขาในการสังเกตธรรมชาติ สถานที่ทำงานหลักของเขาคือป่าไม้ในออสเตรีย ซึ่งเขาได้พัฒนาเทคโนโลยีทางเทคนิคเกษตร ซึ่งสะท้อนให้เห็นในสิทธิบัตรของเขา
โครงร่างทั่วไปของการติดตั้งนั้นคุ้นเคยกับเราแล้วจากผลงานของ Clem รุ่นของเครื่องที่แสดงในรูปที่ 39 คนซ้ายแนะนำโดย Leopold Sheriju เป็นที่ทราบกันดีอยู่แล้วว่าไม่ได้นำไปปฏิบัติเพราะมีข้อบกพร่อง เห็นด้วย โครงการนี้คล้ายกับการออกแบบของ Richard Clem มาก แต่เชอร์จูไม่มีโรเตอร์รูปกรวย ในความคิดของฉัน ข้อบกพร่องนี้มีความสำคัญ การหมุนของของไหลจะสร้างแรงเหวี่ยงหนีศูนย์กลาง ซึ่งเราต้องใช้เพื่อเพิ่มพลังงานจลน์ของของไหลทำงาน เพื่อให้เป็นไปตามเงื่อนไขนี้ รัศมีการหมุนของของเหลวจะต้องค่อยๆ เพิ่มขึ้น โดยเฉพาะอย่างยิ่งตามแนววิถีของเกลียวลอการิทึม ซึ่งทำให้สามารถเพิ่มองค์ประกอบแนวรัศมีของความเร็วของของเหลวได้เนื่องจากอิทธิพลของแรงเหวี่ยงหนีศูนย์กลาง
ข้าว. 39. แผนผังของเครื่องกำเนิด Leopold Sherzhyu (ซ้าย) และเครื่องจักรแบบแรงเหวี่ยงของ Frolov (ขวา)
วิธีแก้ปัญหานี้ถูกเสนอในรูปที่ 39 ใช่ การออกแบบของ Frolov ปี 2011 ปัจจุบัน โครงการสร้างเครื่องกำเนิดไฟฟ้า Schauberger ที่ใช้การได้กำลังอยู่ในระหว่างการพัฒนา และเราขอเชิญนักลงทุนที่สนใจและพันธมิตรทางอุตสาหกรรมให้เข้าร่วมในโครงการ
ฉันสงสัยว่า Richard Clem รู้เรื่องงานของ Viktor Schauberger หรือไม่? ดูเหมือนไม่น่าจะเป็นไปได้ เนื่องจากริชาร์ดทำงานเป็นพนักงานควบคุมเครื่องจักรกลหนักทั่วไป โดยเฉพาะอย่างยิ่ง พนักงานดับเพลิงแอสฟัลต์ร้อน เป็นไปได้มากว่าสิ่งประดิษฐ์ทั้งสองนี้เป็นโครงการอิสระสองโครงการเมื่อพิจารณาถึงสิ่งที่เปรียบเทียบและหาข้อสรุปสำหรับการออกแบบเครื่องจักรประเภทนี้จะเป็นประโยชน์
ภาพถ่ายของอุปกรณ์ Schauberger ดั้งเดิมซึ่งเก็บไว้ในพิพิธภัณฑ์ในออสเตรียได้รับการตีพิมพ์โดยได้รับอนุญาตจากตระกูล Schauberger ซึ่งเป็นเว็บไซต์ของพวกเขา www.pks.or.at ในรูปที่ 40 แสดงผู้เขียนและ "เครื่องสร้างบ้าน" ของเขา น้ำเข้ามาจากด้านบนในส่วนแคบของกรวย ควรสังเกตว่านอกเหนือจากน้ำแล้วยังมีอากาศจำนวนเล็กน้อยในท่อเสมอและสภาพนี้ถือว่าจำเป็นสำหรับการทำงานของอุปกรณ์ที่ประสบความสำเร็จ ภาพแสดงแผ่นกรองอากาศรูปทรงลูกบอล เมื่อตั้งค่าเครื่อง สิ่งสำคัญคือต้องเลือกส่วนผสมที่จำเป็นของน้ำและอากาศในท่อโดยใช้วาล์วและก๊อกควบคุม
ข้าว. 40. Viktor Schauberger และ "เครื่องกำเนิดไฟฟ้าในบ้าน" ของเขา
ที่ด้านล่างซ้ายเป็นเครื่องกำเนิดไฟฟ้าและลูกรอก โรเตอร์ทำจากท่อทองแดงที่พันรอบกรวยดังแสดงในรูปที่ 41.
ข้าว. 41. อุปกรณ์ในพิพิธภัณฑ์ Schauberger ประเทศออสเตรีย
ของเหลวเติมอากาศมีความยืดหยุ่น ซึ่งช่วยให้สะสมพลังงานศักย์เมื่อของเหลวถูกบีบอัดภายใต้การกระทำของแรงเหวี่ยงหนีศูนย์กลาง แล้วแปลงเป็นพลังงานจลน์ของโรเตอร์ เราได้สังเกตความแตกต่างนี้แล้ว: ความยืดหยุ่นของของไหลทำงานในการออกแบบดังกล่าว จำเป็นสำหรับการแปลงพลังงานศักย์ แรงเหวี่ยงจะบีบอัดมวลการทำงานทำให้พลังงานศักย์เพิ่มขึ้น นอกจากนี้ เมื่อเคลื่อนที่เป็นเกลียวที่มีรัศมีเพิ่มขึ้น พลังงานนี้จะถูกแปลงเป็นพลังงานจลน์ของมวลการทำงาน ความเร่ง และเพิ่มแรงบิดของโรเตอร์ด้วย
นอกจากนี้ จำเป็นต้องมีสื่อที่ยืดหยุ่นได้ เนื่องจากของไหลที่ไม่สามารถบีบอัดได้ไม่สามารถเคลื่อนที่ในการไหลอย่างต่อเนื่องด้วยความเร่งได้ โดยไม่มีความไม่ต่อเนื่องและความปั่นป่วน
คุณลักษณะการออกแบบที่น่าสนใจของหัวฉีดในเครื่อง Schauberger: ใช้เม็ดมีดที่ไม่หมุน แต่สร้างการหมุนวนของน้ำที่ทางออกของท่อ รูปที่ 42.
ข้าว. 42. หัวฉีดที่ปลายท่อ "เครื่องกำเนิดไฟฟ้าที่บ้าน" Schauberger
โซลูชันทางเทคนิคนี้เป็นที่รู้จักกันอย่างแพร่หลายสำหรับนักออกแบบอุปกรณ์ซึ่งจำเป็นต้องเพิ่มความเร็วของเจ็ทที่ทางออกของหัวฉีด เมื่อสร้างการหมุนของการไหลของน้ำรอบแกน กระแสน้ำขนาดเล็กจะก่อตัวขึ้นที่ขอบรอบ ซึ่งทำหน้าที่เป็น "ลูกบอล" ของตลับลูกปืนชนิดหนึ่งที่ช่วยลดแรงเสียดทานของน้ำกับผนังของท่อ ในการออกแบบของเราซึ่งเรากำลังพัฒนาตามรูปแบบที่คล้ายคลึงกัน รูปที่ 39 ถูกต้อง ใช้วิธีแก้ปัญหาที่คล้ายกัน หัวข้อนี้มีแนวโน้มดี การคำนวณแสดงให้เห็นว่าโรเตอร์ที่มีรัศมี 30 ซม. ที่ 3000 รอบต่อนาทีสามารถให้พลังงานบนเพลาได้ 40 กิโลวัตต์ รายละเอียด - บนเว็บไซต์ http://alexfrolov.narod.ru
เป็นที่ทราบกันดีอยู่แล้วว่าอุปกรณ์ Schauberger ไม่เพียงแต่เข้าสู่โหมดการหมุนตัวเองเท่านั้น แต่ยังสร้างแรงผลักในแนวแกน (แนวตั้ง) ขนาดใหญ่อีกด้วย หนึ่งในอุปกรณ์ของ Schauberger ได้ถอดออก เจาะหลังคาและทำลายส่วนหนึ่งของอาคารในระหว่างการทดสอบ
ชะตากรรมของนักประดิษฐ์พาเขาไปอเมริกาซึ่งเขาทะเลาะกับหุ้นส่วนแม้ว่าเครื่องกำเนิดไฟฟ้าของเขาจะทำงานได้ดีมาก หลังจากเซ็นสัญญาเป็นภาษาอังกฤษซึ่งเขาไม่เข้าใจ Schauberger ก็กลับไปยุโรป ต่อมา เขาได้เรียนรู้ว่าภายใต้สัญญานี้ เขาได้โอนสิทธิ์ทั้งหมดในการพัฒนาของเขาไปยังชาวอเมริกัน และตัวเขาเองก็ไม่มีสิทธิ์มีส่วนร่วมในการศึกษาเหล่านี้อีกต่อไป
Evgeny Arsentiev พูดถึงรายละเอียดเกี่ยวกับสิ่งนี้และการออกแบบอื่น ๆ ในหัวข้อนี้บนเว็บไซต์ของเขา www.evgars.com เป็นที่ทราบกันดีเกี่ยวกับความพยายามของ Evgeny Stepanovich Papushin ผู้เขียนมอสโกในการสร้าง "เครื่องหมุนด้วยตนเอง" ของหลักการทำงานที่คล้ายคลึงกัน แต่แผนการและผลลัพธ์ของเขาไม่สามารถเผยแพร่ได้
การพัฒนาที่คล้ายกันโดยใช้อากาศเป็นที่รู้จักในปี 1960 ในสหรัฐอเมริกา เขียนโดย คาร์ล แฮสเคลล์ ขณะนี้ได้รับการพัฒนาโดยทีมที่นำโดย Ron Rockwel ไม่มีสิทธิบัตรสำหรับการประดิษฐ์นี้ และมีข้อมูลน้อยมาก แต่สามารถสังเกตคุณลักษณะของกังหันแบบค้ำจุนตัวเองนี้ได้: การปฏิวัติถึง 100,000 รอบต่อนาที มีการจ่ายศักย์ไฟฟ้าสูงให้กับกังหัน ซึ่งดูเหมือนว่าจะลดแรงเสียดทานลง ดังนั้น ระหว่างการทำงาน อากาศจะถูกแตกตัวเป็นไอออน
ฉันจะยกตัวอย่างอีกตัวอย่างหนึ่งของการใช้แรงเหวี่ยงหนีศูนย์กลาง นั่นคือ การไล่ระดับความดันอีเทอร์บนตัวหมุน เพื่อเพิ่มประสิทธิภาพในการแปลงรูปแบบพลังงาน ในปี 2542 ฉันได้จัดทำรายงานการประชุมที่มหาวิทยาลัยเซนต์ปีเตอร์สเบิร์กในหัวข้อ "อิเล็กโทรไลซิสน้ำที่มีประสิทธิภาพสูง" มีการเสนอวิธีแก้ปัญหาทางเทคนิคเพื่อเปลี่ยนเงื่อนไขของการเกิดก๊าซบนพื้นผิวของอิเล็กโทรด วิธีนี้คือการสร้างการหมุนของเซลล์ รูปแบบที่เสนอจะแสดงในรูปที่ 43.
ข้าว. 43. แบบแผนของอิเล็กโทรไลต์แบบแรงเหวี่ยง Frolov
สาระสำคัญของการประดิษฐ์นี้อยู่ในความจริงที่ว่าแรงเหวี่ยงที่เกิดขึ้นระหว่างการหมุนจะกระทำต่อชั้นก๊าซและฉีกออกจากพื้นผิวของอิเล็กโทรด ก๊าซ (ไฮโดรเจน) ในการออกแบบนี้ถูกรวบรวมไว้ใกล้กับแกนหมุนและสามารถดึงออกจากที่นั่นเพื่อใช้ประโยชน์ได้ ในการออกแบบนี้ควรจะปล่อยออกซิเจนสู่ชั้นบรรยากาศ (รูที่ฝา) ขนาดของแรงเหวี่ยงหนีศูนย์กลางซึ่งกำหนดประสิทธิภาพของกระบวนการต้องสูงสุด ซึ่งจำกัดด้วยความเป็นไปได้ในการออกแบบเท่านั้น จำเป็นต้องใช้พลังงานของไดรฟ์ในขั้นตอนของการเร่งความเร็วของโรเตอร์ แต่ต้องใช้ต้นทุนน้อยที่สุดเพื่อรักษาการหมุน ในอิเล็กโทรไลต์แบบแรงเหวี่ยงนี้ ประสิทธิภาพจะถูกกำหนดโดยการสร้างสภาวะที่เหมาะสมสำหรับโพลาไรเซชันของโมเลกุลน้ำใกล้กับพื้นผิวของอิเล็กโทรด ในกรณีที่ไม่มีฟิล์มแก๊สอยู่ (หรือมีอิทธิพลลดลงบางส่วน) อันที่จริง วิธีนี้ช่วยลดแรงดันไฟแตกเริ่มต้น ซึ่งนำไปสู่การลดการใช้พลังงาน การพัฒนาโครงการและการทดลองเกี่ยวกับวิธีการที่ฉันเสนอนั้นเป็นไปได้หากมีลูกค้าสนใจในหัวข้อนี้ ฉันไม่ได้จดสิทธิบัตรวิธีนี้ แอนะล็อกต่างประเทศเป็นที่รู้จักเช่นในผลงานของนักวิทยาศาสตร์ชาวญี่ปุ่น Ohmasa (Japan Techno) การสั่นสะเทือนความถี่ต่ำถูกใช้ในอิเล็กโทรไลต์และให้การหมุนของน้ำอย่างแม่นยำและไม่ใช่แค่การสั่นสะเทือนเท่านั้น ชั้นก๊าซจากพื้นผิวของอิเล็กโทรด เทคโนโลยีนี้อธิบายไว้ในสิทธิบัตรระหว่างประเทศ WO 03/048424A1 ซึ่งยื่นในปี 2547
อีกวิธีหนึ่งของการแยกอิเล็กโทรไลซิสแบบแรงเหวี่ยงได้รับการพัฒนาโดยผู้เขียน Studennikov V.V. และ Kudinov แอปพลิเคชันรัสเซียหมายเลข 2003104497/12 ลงวันที่ 17 กุมภาพันธ์ 2546 แอปพลิเคชันสากล PCT/RU 03/00413 ลงวันที่ 18 กันยายน 2546 "การติดตั้งการสลายตัวของน้ำด้วยกระแสไฟฟ้า" สิ่งประดิษฐ์ของพวกเขาเป็นของสาขาไฟฟ้าเคมี โครงการแสดงในรูปที่ 44.
ข้าว. 44. โครงการเซลล์อิเล็กโทรไลต์แบบหมุนของ Studennikov และ Kudinov
ลักษณะเฉพาะขององค์ประกอบทางเคมีของอิเล็กโทรไลต์ที่ผู้เขียนใช้คือประกอบด้วยประจุลบหนักและไอออนบวกแสง อิเล็กโทรไลต์จะถูกป้อนเข้าไปในโรเตอร์ที่หมุนด้วยความเร็วสูง ในด้านของแรงเหวี่ยงหนีศูนย์กลางในอิเล็กโทรไลต์ ตัวกลางจะถูกแบ่งออกเป็นไอออนเบาและหนัก ซึ่งนำไปสู่ลักษณะความต่างศักย์ในแนวรัศมี และจากนั้นจึงมีลักษณะเป็นกระแสไฟฟ้า ซึ่งวงจรปิดโดยการหมุน โรเตอร์โลหะ กำลังขับในการทดลองของผู้เขียนคือ 5 กิโลวัตต์ ความเร็วในการหมุน - จาก 1,500 ถึง 40000 รอบต่อนาที ดังนั้นจึงไม่จำเป็นต้องใช้แหล่งพลังงานภายนอกสำหรับอิเล็กโทรไลซิสที่นี่ จำเป็นต้องทำให้อิเล็กโทรไลต์หมุน จากนั้นอิเล็กโทรไลต์จะสร้างความแตกต่างที่อาจเกิดขึ้นได้ ซึ่งสนับสนุนกระบวนการแยกตัวออกจากกัน เมื่อปิดวงจรภายนอก กระแสไฟฟ้านำจะไหลเข้าไป ซึ่งสามารถให้พลังงานจำนวนมากในส่วนที่บรรทุกได้ ในขณะที่กระบวนการดำเนินการด้วยการปล่อยก๊าซ (ออกซิเจนและไฮโดรเจน) ออกจากอิเล็กโทรไลต์
เมื่อใช้อิเล็กโทรไลต์ที่เป็นกรด ไฮโดรเจนไอออนบวกจะเกิดขึ้นใกล้กับแกนของการหมุน เมื่อได้รับอิเล็กตรอนจากกล่องโลหะ พวกมันจะรวมตัวกันเป็นโมเลกุลไฮโดรเจนอีกครั้ง แอนไอออนที่หนักกว่ารวมตัวกันที่ขอบของปริมาตรที่หมุน บริจาคอิเล็กตรอนให้กับร่างกายของโรเตอร์โลหะ ซึ่งนำไปสู่การก่อตัวของโมเลกุลออกซิเจน
ด้วยแรงเหวี่ยงหนีศูนย์กลาง โมเลกุลออกซิเจนเบาจะถูกผลักโดยไอออนที่หนักกว่าเข้าหาแกนของปริมาตรอิเล็กโทรไลต์ที่หมุนอยู่ ผ่านรูในเพลา โมเลกุลของออกซิเจนและไฮโดรเจนที่เป็นผลจะถูกลบออกจากปริมาตรที่หมุนและป้อนให้กับผู้บริโภค ปฏิกิริยาไฟฟ้าเคมีของการสลายตัวของน้ำนี้เป็นดูดความร้อน กล่าวคือ สามารถดำเนินต่อไปเมื่อมีการแลกเปลี่ยนความร้อนกับสิ่งแวดล้อมภายนอกเท่านั้น เพื่อจุดประสงค์นี้ การสะสมที่เย็นลงที่ขอบของปริมาตรการหมุนจะเข้าสู่ทางเข้าของเครื่องแลกเปลี่ยนความร้อน และอิเล็กโทรไลต์ที่ให้ความร้อนกับอุณหภูมิแวดล้อมจะถูกส่งไปยังบริเวณตรงกลางของปริมาตรที่หมุน การเติมน้ำบริสุทธิ์จากภายนอกเป็นสิ่งจำเป็น เนื่องจากน้ำจะสลายตัวเป็นออกซิเจนและไฮโดรเจน
ตามที่ผู้เขียนและนักพัฒนาในทางทฤษฎีสำหรับพลังงานกลแต่ละวัตต์ที่ใช้ไปจาก 20 ถึง 88 วัตต์ของความร้อนจะถูกดูดซับจากสภาพแวดล้อมภายนอกซึ่งสอดคล้องกับปริมาณก๊าซที่ผลิตจากน้ำ นี่หมายถึงประสิทธิภาพ 20 ต่อ 1 หรือแม้แต่ 88 ต่อ 1 ในการออกแบบดังกล่าว หนึ่งลูกบาศก์เมตรของปริมาตรการทำงานปกติของอิเล็กโทรไลเซอร์จะทำให้สามารถผลิตไฮโดรเจนได้ 3.5 ลูกบาศก์เมตรต่อวินาที
มีอยู่ครั้งหนึ่ง ข้อมูลของผู้เขียนเกี่ยวกับการพัฒนาของพวกเขากระตุ้นความสนใจอย่างมากจากนักลงทุน รวมทั้งนักลงทุนต่างชาติ แต่ต่อมา คำกล่าวของผู้เขียนหลายคนไม่ได้รับการยืนยันจากการทดลอง ในปี 2553 โครงการนี้ยังไม่ถึงระดับการค้า หัวข้อนี้ได้รับการจัดการโดย Alambik Alfa ในมอสโก บทความที่เป็นประโยชน์ในหัวข้อ "กราวิโตลิซิสด้วยเคมีของ Studennikov" เผยแพร่โดย Andrei Fadeevich Makarov จาก Kemerovo ข้อมูลเพิ่มเติมสามารถพบได้ในนิตยสาร New Energy บนเว็บไซต์ของเรา
เราจะไม่พิจารณารายละเอียดการผลิตความร้อนโดยคาวิเทชั่นด้วยวิธีการหมุนเวียนน้ำแบบต่างๆ ฉันขอให้คุณศึกษาพื้นฐานของเครื่องกำเนิดความร้อนกระแสน้ำวน (VTG) ฉันแนะนำให้ค้นหางานของ Yuri Semenovich Potapov บนอินเทอร์เน็ต จากมุมมองของฉัน พลังงานความร้อนส่วนเกินในอุปกรณ์ดังกล่าวก็เป็นผลมาจากการเปลี่ยนแปลงของพลังงานอิสระของอีเธอร์ผ่านการใช้เอฟเฟกต์เฉื่อยแบบแรงเหวี่ยงที่เกิดขึ้นระหว่างการหมุนของของไหลทำงาน: การหมุนทำให้เกิดแรงดัน แรงอัดของ สารทำงานและการเพิ่มขึ้นของพลังงานศักย์ซึ่งสามารถใช้เพื่อสร้างพลังงานจากแหล่งที่เป็นอิสระ ผลกระทบอื่นๆ ทั้งหมดในอุปกรณ์ประเภทคาวิเทชั่นเป็นเรื่องรอง
อย่างไรก็ตาม เราได้ศึกษาผลกระทบทางอ้อมอย่างหนึ่งของ VTG ในโครงการร่วมกับ Valery Vladimirovich Lazarev มหาวิทยาลัยเซนต์ปีเตอร์สเบิร์ก แนวคิดของการทดลองของเราคือ การตรวจสอบผลกระทบของการเกิดโพรงอากาศต่อระดับกัมมันตภาพรังสีของเหลวที่ไหลเวียนอยู่ใน WTG เราประสบความสำเร็จในการทดลองสองครั้งที่แตกต่างกัน ซึ่งแสดงให้เห็นว่ากระบวนการคาวิเทชั่นไม่เพียงลดระดับกัมมันตภาพรังสีของของเหลวเอง แต่ยังรวมถึงพื้นหลังกัมมันตภาพรังสีทั่วไปรอบๆ WTG ที่ทำงานอยู่ด้วย รายละเอียดสามารถพบได้ในเว็บไซต์ของเรา www.faraday.ru
ความสำเร็จในทางปฏิบัติในด้านการสร้างอุปกรณ์พลังงานอิสระตามหลักการนี้ประสบความสำเร็จและมีการพัฒนามาเป็นเวลานานเช่น "โรงไฟฟ้าพลังความร้อนควอนตัม" ของ Potapov รูปที่ 45.
ข้าว. 45. โครงการโรงไฟฟ้าสองขั้นตอน KTES Potapov
พวกเขาไม่เพียงให้ความร้อนกับของเหลวเท่านั้น แต่ยังผลิตไฟฟ้าที่จำเป็นสำหรับปั๊มและผู้บริโภคภายนอก พิจารณารูปแบบ: ปั๊ม 6 สูบน้ำเข้า "ไซโคลน" 3 และหลังจากเร่งน้ำแล้ว น้ำจะออกจากหัวฉีด 9 ไปยังกังหันไฮดรอลิก 11 ซึ่งเชื่อมต่อกับเครื่องกำเนิดไฟฟ้า ในถังล่าง 13 มีการติดตั้งไฮโดรเทอร์ไบน์ 14 ตัวที่สองซึ่งเชื่อมต่อกับเครื่องกำเนิดไฟฟ้าด้วย ที่ทางออกจากหัวฉีด 9 ของเครื่องกำเนิดความร้อนกระแสน้ำวน อุณหภูมิของตัวกลางในการทำงานอยู่ที่ประมาณ 70 - 100 องศาเซลเซียส และแรงดันอยู่ที่ 8 - 10 atm กระแสนี้ให้กังหันเครื่องแรก กังหันในภาชนะด้านล่างขับเคลื่อนด้วยของเหลวที่เคลื่อนที่ภายใต้น้ำหนักของตัวเองจากภาชนะด้านบน ดังนั้นพร้อมกับการผลิตพลังงานความร้อนซึ่งได้รับจากเครื่องกำเนิดความร้อน 1 พลังงานไฟฟ้าจะถูกสร้างขึ้นในการติดตั้ง การรับไฟฟ้าและความร้อนนี้ไม่ต้องเสียค่าใช้จ่ายด้านเชื้อเพลิง การผลิตเป็นมิตรกับสิ่งแวดล้อม เราไม่มีข้อมูลเกี่ยวกับผู้ผลิต รายงานการทดสอบ และประสบการณ์ในการทำงานของโรงไฟฟ้าดังกล่าว
จากหนังสือ ปัจจัยสี่ ค่าใช้จ่าย - ครึ่งหนึ่ง, ผลตอบแทน - สองเท่า ผู้เขียน Weizsäcker Ernst Ulrich ฟอนพลังสร้างสรรค์แห่งการแยกตัว ดาร์วินพบหลักฐานที่ชัดเจนที่สุดสำหรับทฤษฎีของเขาในแหล่งที่อยู่อาศัยของเกาะ เช่น หมู่เกาะกาลาปากอส นกฟินช์ที่เขาบรรยายครั้งแรกนั้นแตกต่างจากนกฟินช์ที่พบในส่วนอื่น ๆ ของโลกอย่างมาก ในกรณีที่ไม่มีเกาะ
จากหนังสือเหนือแผนที่มาตุภูมิ ผู้เขียน มิคาอิลอฟ นิโคไล นิโคเลวิชพลังของแม่เหล็ก นานก่อนการปฏิวัติ สังเกตว่าเข็มทิศนั้นซุกซนในสเตปป์เคิร์สต์ ลูกศรของมันไม่ได้ดูตรงจากใต้สู่เหนือ แต่เบี่ยงเบน: ในสถานที่ต่าง ๆ ในทิศทางต่าง ๆ และมีจุดแข็งต่างกัน Ernest Leist นักธรณีฟิสิกส์แห่งมอสโกสังเกตเห็นการปฏิเสธของแม่เหล็กเหล่านี้
จากหนังสือ Virtual Reality: How It Begin ผู้เขียน Melnikov Levพลังแห่งกระแส โรงไฟฟ้าส่วนใหญ่ของเราสร้างขึ้นจากเชื้อเพลิงราคาถูก ซึ่งก่อนหน้านี้ถือว่าเป็นของเสีย บนถ่านหินสีน้ำตาล ถ่านหินพรุ และค่าปรับถ่านหิน แต่ยังมีสถานีในแม่น้ำ - แหล่งพลังงานราคาถูก การสร้างสถานีไฟฟ้าพลังน้ำขนาดใหญ่ไม่ใช่เรื่องง่าย จำเป็น
จากหนังสือ Habitable Space Stations ผู้เขียน Bubnov Igor Nikolaevichพลังบำบัดของศิลปะ นักจิตวิทยาชาวโซเวียตที่มีชื่อเสียงอีกคนหนึ่ง L.S. Vygotsky แย้งว่าศิลปะมีหน้าที่ชดเชย สิ่งนี้ทำให้มีความสำคัญอย่างยิ่งต่อการรักษาเสถียรภาพและการแก้ไขสถานะทางจิตฟิสิกส์ของนักบินอวกาศ มีประสิทธิภาพมากที่สุดในกรณีนี้
จากหนังสือเรือรบ ผู้เขียน เพอร์ลียา ซิกมุนด์ นาอูโมวิชแรงโน้มถ่วงเทียม ผู้เชี่ยวชาญหลายคนในเวชศาสตร์อวกาศได้ทำงานเกี่ยวกับปัญหาของบุคคลในภาวะไร้น้ำหนักมานานแล้ว แต่ถึงแม้จะมีข้อมูลการทดลองอยู่ก็ตาม คำถามมากมายที่เกี่ยวข้องกับผลกระทบของภาวะไร้น้ำหนักต่อบุคคลนั้นยังไม่ได้รับการแก้ไข
จากหนังสือ New Space Technologies ผู้เขียน Frolov Alexander Vladimirovichความแข็งแกร่งและความเร็ว ความเร็วที่ยอดเยี่ยมเป็นข้อได้เปรียบที่สำคัญมากในการต่อสู้ เรือที่เร็วกว่าจะเลือกตำแหน่งที่ดีและระยะการรบสำหรับตัวมันเอง หากผู้บังคับบัญชาต้องการ เขาสามารถเพิ่มหรือลดระยะทางได้เสมอ ถ้าคู่ต่อสู้เลี่ยงการต่อสู้ เขาก็ทำได้
จากหนังสือ พายุฝนฟ้าคะนองใต้ดิน ผู้เขียน Orlov Vladimirบทที่ 3 เอฟเฟกต์ Magnus และแรง Lorentz คล้ายกับปีก Zhukovsky-Chaplygin แรง Magnus เกิดขึ้นเนื่องจากความแตกต่างในความดันของการไหลปานกลางบนพื้นผิวของกระบอกสูบที่หมุน ผลกระทบนี้ถูกค้นพบโดยนักวิทยาศาสตร์ชาวเยอรมัน H. G. Magnus ในปี 1852 ในรูป 8 แสดง
จากหนังสือ 100 ความสำเร็จที่ยิ่งใหญ่ในโลกแห่งเทคโนโลยี ผู้เขียน Zigunenko Stanislav Nikolaevichบทที่ 27 แรงผลักดันตามลำดับเวลา การพัฒนาแนวคิดของ Veinik ว่า "รุนแรง" ใด ๆ ของสารของวัตถุ (ร่างกาย) สามารถใช้เพื่อสร้างช่องเวลาและเปลี่ยนความเร็วของเวลาสำหรับวัตถุวัสดุที่กำหนด ลองพิจารณาตัวอย่างง่ายๆ
จากหนังสือสมอ ผู้เขียน Skryagin Lev Nikolaevichพลังแห่งการเปลี่ยนแปลงนับพันล้านครั้งของกาโลหะ เรามาเริ่มกันเลยดีกว่า ถ่านอยู่ที่ไหน ชอบที่ไหน หมดแรง. ร่วมกับออกซิเจน กลายเป็นก๊าซระเหยแล้วบินเข้าไปในท่อ ทุกคนรู้เรื่องนี้ ใครจะไม่เชื่อ
จากหนังสือ นาโนเทคโนโลยี [วิทยาศาสตร์ นวัตกรรม และโอกาส] โดย ฟอสเตอร์ ลินน์พลังแห่งพันล้าน หากพายุเฮอริเคนธรรมดาทำลายหมู่บ้านทั้งหมู่บ้านแล้วการระเบิดจะทำอะไรได้ - พายุเหล็ก การระเบิดบางทีอาจจะพัดบ้านเรือนในเมืองทั้งเมืองราวกับเศษจากโต๊ะน้ำชา ในความเป็นจริง สิ่งนี้ไม่ได้เกิดขึ้น . แน่นอน มันเกิดขึ้นที่บ้านหนึ่งหลุดออกจากการระเบิด แต่บ้านข้างเคียง
จากหนังสือ อัลกอริธึมการประดิษฐ์ ผู้เขียน Altshuller Heinrich Saulovichพลังของกระจกมอง ที่จะถอดเช่น Ariel ... นี่คือความฝันของนักเขียนนิยายวิทยาศาสตร์ไม่เพียงเท่านั้น แต่ยังรวมถึงนักวิทยาศาสตร์หลายคนด้วย ปรากฏการณ์ที่ทำให้วัตถุเคลื่อนที่ได้อย่างอิสระในอวกาศ เรียกว่าการลอยตัวมานานแล้ว (จากภาษากรีก levitas - "rise") การลอยตัวด้วยแม่เหล็ก เทอมนี้
จากหนังสือของผู้เขียน จากหนังสือของผู้เขียน10.2. พลังของความคิด ความคิดที่ดีจริงๆคืออะไร? การกระทำใดๆ ของมนุษย์ รวมถึงการสร้างสรรค์องค์กรและความคิดสร้างสรรค์ เริ่มต้นด้วยความคิด ความคิดที่ดีที่แสดงออกในเวลาที่เหมาะสมมีพลังและความสามารถในการสร้างสรรค์ที่เหลือเชื่อ สำหรับธุรกิจ
จากหนังสือของผู้เขียนพลังแห่งจินตนาการ มันได้กลายเป็นความจริงทั่วไปที่แฟนตาซีมีบทบาทอย่างมากในกิจกรรมสร้างสรรค์ใด ๆ รวมถึงวิทยาศาสตร์และเทคนิค แต่มีความขัดแย้งที่น่าทึ่ง: การรับรู้ถึงคุณค่าสูงสุดของจินตนาการไม่ได้มาพร้อมกับความพยายามอย่างเป็นระบบที่มุ่งเป้าไปที่การตระหนักรู้