Vortex-jahuti välja tsentrifugaaljõud. Implosioon. Forellimootor ja biotehniline allveelaev
Klassikalise makroskoopilise elektrodünaamika põhivõrrandid, mis kirjeldavad elektromagnetilisi nähtusi mis tahes keskkonnas (sh vaakumis), saadi 60ndatel. 19. sajand J. Maxwell, mis põhineb elektri- ja magnetnähtuste empiiriliste seaduste üldistamisel ja inglise teadlase M. Faraday idee arendamisel, et elektriliselt laetud kehade vastastikmõjud toimuvad elektromagnetvälja abil. (elektromagnetilise induktsiooni nähtus). Maxwell pakkus välja võrrandid, mis ühendavad elektrilisi ja magnetnähtusi ning ennustas elektromagnetlainete olemasolu. Maxwelli teooria paljastab valguse elektromagnetilise olemuse. Maxwelli teooria on makroskoopiline, kuna see käsitleb makroskoopiliste laengute ja voolude tekitatud välju, mis on koondunud palju suurematesse mahtudesse kui üksikute aatomite ja molekulide maht.
Maxwelli elektromagnetvälja teooria seob elektromagnetvälja iseloomustavad suurused selle allikatega, s.t. elektrilaengute ja voolude jaotus ruumis. Vektorid , , ja elektromagnetväli pidevas keskkonnas järgivad ühendusvõrrandid , mis on määratud keskkonna omadustega. Siin on elektrivälja tugevuse vektor, on elektrilise nihke vektor, on magnetilise induktsiooni vektor, on magnetvälja tugevuse vektor. Neid statsionaarsete elektri- ja magnetväljade vektoreid käsitleti varem, näiteks aastal.
Elektromagnetväljad rahuldavad superpositsiooniprintsiipi, s.t. mitme allika täisväli on üksikute allikate tekitatud väljade vektorsumma.
Mõelge elektromagnetilise induktsiooni nähtusele. Faraday seadusest
ε in = - ∂ F m /∂ t (3.1)
sellest järeldub, et mis tahes muutus ahelaga ühendatud magnetinduktsiooni voos põhjustab induktsiooni elektromotoorjõu tekkimise ja selle tulemusena induktiivvoolu ilmnemise. Maxwell oletas, et igasugune vahelduv magnetväli ergastab ümbritsevas ruumis vahelduva elektrivälja, mis on ahelas induktsioonivoolu põhjuseks. Maxwelli ideede kohaselt mängib juhtiv ahel, milles emf ilmub, teisejärgulist rolli, olles vaid indikaator, mis seda välja tuvastab.
2. küsimus. Maxwelli esimene võrrand integraalkujul.
Maxwelli esimene võrrand on induktsiooniseadus
Faraday. Definitsiooni järgi on emf. on võrdne elektrivälja tugevuse vektori tsirkulatsiooniga:
![]() , (3.2), mis võrdub potentsiaalivälja nulliga. Üldjuhul muutuva keerisevälja jaoks ε sisse saame
, (3.2), mis võrdub potentsiaalivälja nulliga. Üldjuhul muutuva keerisevälja jaoks ε sisse saame
Avaldis (3.3) – Maxwelli esimene võrrand: elektriväljatugevuse vektori tsirkulatsioon mööda suvalist suletud kontuuri L võrdub magnetilise induktsiooni vektori voo muutumise kiirusega läbi selle kontuuriga piiratud pinna, mis on võetud vastupidise märgiga. Märk “-” vastab Lenzi reeglile induktsioonvoolu suuna kohta. Sellest järeldub vahelduv magnetväli loob ruumis keerise elektriväli olenemata sellest, kas juht on selles väljas (suletud juhtivahel) või mitte. Nii saadud võrrand (3.3) on võrrandi (3.2) üldistus, mis kehtib ainult potentsiaalse välja puhul, s.o. elektrostaatiline väli.
Pöörise elektrivälja tekkimist ruumis vahelduva magnetvälja toimel kasutatakse näiteks trafodes, aga ka induktsioontüüpi elektronkiirendites - betatronites.
Vahelduv magnetväli, mis tekib trafo primaarmähises selle vahelduva elektrivoolu läbimisel, tungib ka sekundaarmähisesse ja indutseerib selles vahelduva elektromotoorjõu.
Vaakumkiirenduskambris suletud rõnga kujul oleva kooniliste pooluste tükkidega elektromagneti poolt tekitatavas vahelduvas magnetväljas tekib keeriselektriväli. Pöörise elektrivälja intensiivsusjooned on kontsentriliste ringidena. Sel juhul tekitab pooluse tükkide eriline kuju magnetvälja radiaalse jaotuse, mille magnetiline induktsioon väheneb teljelt orbiidi perifeeria suunas. See tagab elektronide orbiidi stabiilsuse. Kiirenduskambris olevad elektronid liiguvad mööda ringikujulisi trajektoore ja korduva orbitaalliikumise käigus kiirendatakse märkimisväärse energiani.
Patendi RU 2364969 omanikud:
Leiutis käsitleb magnetismi füüsikat, ühesuunalise pulseeriva keerismagnetvälja saamist, mis tekitab selles liikuva ferromagnetilise keha suhtes piki ümbermõõtu tõmbava magnetvälja. Pöörise magnetvälja tekitamise viis mööda teatud ringi, mis on samaväärne magnetvälja pöörlemisega, on see, et mitu püsimagnetit on ringi suhtes sümmeetriliselt paigutatud. Püsimagnetite pikisuunalised magnetteljed on joondatud nimetatud ringi puutujatega punktides, mis paiknevad sellel ringil sümmeetriliselt. Püsimagnetite arv n leitakse tingimusest 2π/n≤ΔΘ, kus nurk ΔΘ=arccos, parameeter γ=d/R ja d on kaugus püsimagnetite magnetiliste pikitelgede lõikepunktidest. nende pooluste tasapindadega määratud ringile raadiusega R. Konstantide magnetite D jõufunktsioon ja parameeter γ valitakse nii, et eelmise magneti tekitatud pidurdusmoment kompenseeritakse osaliselt või täielikult järgmise magneti kiirendusmomendiga. keerise magnetvälja suund. Väärtus D=µ 0 µνS 2 H 0 2 /8π 2 R 5, kus µ 0 =1,256,10 -6 Gn/m on vaakumi absoluutne magnetiline läbilaskvus, µ on ferromagnetilise ruumalakeha suhteline magnetiline läbitavus ν, mis interakteerub magnetväljaga, mille tugevus on võrdne H 0-ga püsimagnetite pooluste tasapinnal nende pooluste ristlõikega S. Tehniline tulemus seisneb ferromagnetilise keha pöörleva liikumise saamises, st. , staatilisest magnetoperioodilisest struktuurist mehaanilise (elektrilise) energia saamisel. 6 haige.
Leiutis käsitleb magnetismi füüsikat, eelkõige meetodeid magnetvälja konfiguratsiooni saamiseks ühesuunaliselt pulseeriva keerisvälja kujul, mis tekitab selles liikuva ferromagnetilise keha (ekstsentrilise) suhtes ümber perimeetri tõmbava magnetvälja.
On teada, et magnetvälja tugevus piki magneti pikitelge on kaks korda suurem kui pikiteljega risti asetsevates suundades. Magnetvälja tugevuse jaotus sfääri sees, mille keskpunkt ühtib hobuserauamagneti magnetpooluste tasandi lõikepunktiga magnetilise pikiteljega, on antud suunamustri abil, näiteks sfääris. magnetilise pikitelje suhtes pöördkeha kuju kardioidi kontuuri järgi, mis saadakse järgmisega:
kus α on raadiuse vektori kõrvalekalde nurk sfääri suvalise punkti suhtes pikisuunalise magnetilise teljega kokku langevast suunast. Seega, α=0 puhul on meil ξ(0)=1, α=π/2 korral saame ξ(π/2)=0,5, mis vastab teadaolevatele füüsilistele andmetele. Hobuserauamagneti puhul, mille α=π, väärtus ξ(π)=0. Otsese magneti puhul kujutab kiirgusmustrit pöördeellipsoid, mille suurem pooltelg on kaks korda suurem kui selle väikepooltelg ja langeb kokku pikiteljega.
On teada, et sünkroonse või asünkroonse vahelduvvoolumootori rootorile selle staatorilt antav pöördemoment on tingitud pöörlevast magnetväljast, mille vektor pöörleb rootori telje suhtes aja funktsioonina. Sel juhul määrab selline magnetväli selle koostoime dünaamilise protsessi rootoriga.
Pole teada, kuidas luua keerise magnetvälja, sünteesides liikumatute püsimagnetite mis tahes kombinatsiooniga tekitatud staatilisi magnetvälju. Seetõttu pole väidetava tehnilise lahenduse analoogid teada.
Leiutise eesmärgiks on meetod keerismagnetvälja loomiseks, milles ferromagnetiline keha kogeb ühesuunalist pulseerivat jõudu, mis paneb sellise keha pöörlevale liikumisele, st saavutab sellise magnetvälja staatilise konfiguratsiooni (alates statsionaarsed püsimagnetid), mis on oma toimelt samaväärne pöörleva magnetväljaga.
See eesmärk saavutatakse väidetava keerise magnetvälja loomise meetodiga, mis seisneb selles, et mitmed püsimagnetid on ringi suhtes sümmeetriliselt paigutatud, püsimagnetite pikisuunalised magnetteljed on joondatud määratud ringi puutujatega. punktid, mis paiknevad sellel ringil sümmeetriliselt ning püsimagnetite arv n leitakse tingimusest 2π/n≤ΔΘ, kus nurk ΔΘ=arccos, parameeter γ=d/R ja d on kaugus ringjoone punktidest. püsimagnetite pikisuunaliste magnettelgede ja nende pooluste tasandite lõikepunkt raadiusega R näidatud ringiga, püsimagnetite jõufunktsioon D ja parameeter γ valida nii, et eelmise magneti tekitatud pidurdusmoment kompenseeritakse osaliselt või täielikult järgneva magneti kiirendusmomendiga keerise magnetvälja suunas ja väärtusega D=µ 0 µνS 2 N 0 2 /8π 2 R 5 , kus µ 0 =1,256,10 -6 H /m - absoluutne magnet vaakumi läbilaskvus, µ - ferromagnetilise keha suhteline magnetiline läbilaskvus o ruumala ν, mis interakteerub magnetväljaga, mille tugevus on võrdne H 0 püsimagnetite pooluste tasapinnal nende pooluste ristlõikega S.
Leiutise eesmärgi saavutamine patendinõudluses kirjeldatud meetodis on seletatav magnetväljade perioodilise struktuuri rakendamisega teatud ringi ümber sama märgiga püsimagnetite pikisuunaliste magnettelgede suunaga piki selle ringi puutujaid, milles keerise magnetväli tekib magnetvälja tugevuse erinevuse tõttu piki ja risti püsimagnetite magnetvälja pikitelge, mis on määratud magnetvälja intensiivsuse ξ(α) suundumusmustriga vastavalt punktile (1). See tagab, et ferromagnetilisele kehale antava keerise magnetvälja suunaline impulssmoment ületab vastassuunalise impulsi momenti.
Pakutud meetodit rakendava seadme struktuur on näidatud joonisel 1. Võimalikud võimalused ferromagnetilise keha liikumiseks ühe n püsimagneti magnetväljas on näidatud joonisel 2 erinevate koormuste ja hõõrdumise väärtuste jaoks ferromagnetilise kehaga ekstsentriku pöörlemisteljel. Joonisel 3 on kujutatud graafikud, mis toimivad n püsimagnetilt, mis juhivad ekstsentriliste jõudude ferromagnetilist keha, võttes arvesse nende jaotust ekstsentriku pöördenurga üle ringi sees. Joonisel 4 on kujutatud kõigi n püsimagneti toimel tekkiva ekstsentrilise jõu impulsi akumuleerumise graafikut iga täispöörde kohta, võtmata arvesse hõõrdemomenti ja sellega seotud koormust, väljendatuna ekstsentrikus püsivalt mõjuva keskmise pöördemomendina. Joonisel 5 on toodud võimsusgraafikud - keerise magnetvälja tekitatud pöördemomendist ja kadude hetkest - ekstsentriku pöörlemiskiiruse funktsioonina. Joonisel fig 6 on kujutatud modifitseeritud seadme diagramm, mis tagab pöörleva rootori dünaamilise tasakaalu tõttu ekstsentriku asemel märkimisväärselt hõõrdekadude vähenemise pöörlemisteljel.
Joonisel 1 on meetodit rakendav seade:
1 - ferromagnetiline keha massiga m, ruumala ν suhtelise magnetilise läbilaskvusega µ,
2 - hoovad pikkusega R ekstsentriku ferromagnetilise korpuse kinnitamiseks,
3 - ekstsentriku pöörlemistelg,
4-15 - raadiusega R ringi ja ühe selle poole suunatud pooluse (näiteks lõunapooluste s) suhtes võrdselt kallutatud püsimagnetid, mille tasapinna lõikepunkt magnetilise pikiteljega on eemaldatud määratud ring (ferromagnetilise keha pöörlemise trajektoor 1) kaugusel d .
Ferromagnetiline keha 1 koos kangiga 2 on kujutatud joonisel 1 nurgaasendis β X-telje suhtes. Ekstsentriku pöörlemistelg on paigutatud punkti O, punkt A asub püsimagneti 5 poolusel, Püsimagneti 5 magnetiline pikitelg on joondatud punktis C oleva ringi puutujaga AB. Esitatud skeemil kasutatakse 12 parameetrilt D identset ja võrdse kaldega püsimagnetit, mis paiknevad sümmeetriliselt näidatud ringi suhtes. nurgad ΔΘ=2π/12=30°.
Joonisel 2 on kujutatud graafikud ferromagnetilise keha 1 liikumisest ühe püsimagneti 4-15 suhtes erinevatel hõõrdehetkedel ja sellega seotud koormuse kohta pöörlemisteljel 3, andes interaktsiooniprotsessidest kvalitatiivse ülevaate.
Ülemine graafik - koormus pöörlemisteljele on väga väike (protsess on võnkesummutatud ferromagnetilise keha maksimaalse algkaugusega magnetpoolusest, ferromagnetilise keha asendi lõplik kõrvalekalle on peaaegu null).
Keskmine graafik - pöörlemistelje koormus on suur (protsess on perioodiliselt summutatud, ferromagnetilise keha minimaalne algkaugus magnetpoolusest, lõpphälve on positiivne, ei jõua magnetpooluse asendisse).
Alumine graafik - koormus pöörlemisteljele on optimaalne (protsess on võnke-aperioodiliselt summutatud ühe võnke pooltsükliga ferromagnetilise keha suuremal algkaugusel magnetpoolusest kui keskmisel graafikul, lõpphälve on negatiivne, möödudes püsimagneti pooluse positsioonist).
Joonisel 3 on kujutatud kaksteist graafikut, mis on sümmeetriliselt jaotatud ümber jõudude ümbermõõdu, mis juhivad ekstsentrikut vastavates nurkvahedes mõõtmetega ΔΘ. On näha, et nende funktsioonide maksimumid on oluliselt suuremad kui nende miinimumide absoluutväärtus, mis on seotud kiirgusmustri konfiguratsiooniga ξ(α) püsimagnetid hobuserauakujulised (joonistamise hõlbustamiseks joonisel 1 on ristkülikukujulised magnetid). See võimaldab eelkõige püsimagnetite arvu n sobiva valiku korral valida parameetri γ ja D väärtuse, mis määrab magnetvälja tugevuse H 0 magnetite pooluste tasapinnal. tagama eelmise püsimagneti pidurdusjõudude osalise või täieliku kompenseerimise kiirendusjõududega, mis tulenevad järgnevast ekstsentrikust pöörlemissuunas.
Joonisel 4 on kujutatud kõigi seadmes kasutatavate püsimagnetite koosmõju graafik, mille tulemuseks on keskmine pöördemoment, mis ekstsentrikus pidevalt toimib.
Joonisel 5 on kaks graafikut - ekstsentrikus genereeritud kasuliku võimsuse graafik ning hõõrdumise ja sellega seotud koormuse ületamiseks kulutatud võimsuse graafik - ekstsentriku pöörlemiskiiruse funktsioonina. Nende graafikute lõikepunkt määrab seadme ühtlase pöörlemiskiiruse väärtuse. Koormuse suurenemisega tõuseb võimsuskao kõver abstsisstelje suhtes suure nurga all, mis vastab võimsusgraafikute näidatud ristumispunkti nihkele vasakule, see tähendab, et see viib püsiva voolu vähenemiseni. -ekstsentriku pöörlemiskiiruse oleku väärtus N SET.
Joonisel 6 on kujutatud üks võimalikest seadme realiseerimise skeemidest, mille puhul rootor on valmistatud dünaamiliselt tasakaalustatud konstruktsioonina, mis põhineb näiteks kolmel ferromagnetilisel kehal, mis paiknevad 120° nurga all ja mis on võrdsel kaugusel R. pöörlemisteljega ja sama massiga, mis ei tekita rootori pöörlemisel vibratsioonikoormust pöörlemisteljele, nagu joonisel 1 kujutatud ekstsentriku puhul, tsentripetaalsete jõudude toimel (viimane sellisel juhul rootor tasakaalustab üksteist). Lisaks põhjustab ferromagnetiliste kehade arvu suurenemine seadme kasuliku võimsuse suurenemist võrdeliselt selliste ferromagnetiliste kehade arvuga. Sellel joonisel kasutatavate püsimagnetite arvu on joonise lihtsustamiseks vähendatud. Tegelikult valitakse see arv valemi järgi n=hr+1, kus h on ferromagnetiliste kehade arv rootoris, p=0, 1, 2, 3, ... on täisarv, mis selgub järgmisest kirjeldusest.
Vaatleme pakutud meetodi töö olemust, võttes arvesse seda rakendava seadme toimimist, mis on näidatud joonisel 1.
Võttes arvesse magnetvälja tugevuse H(α) kiirgusmustri ξ(α) kuju, võib mõista, et võrdsel kaugusel sirge AO lõikepunktist raadiusega R ringiga kuni selleni. punktis ja pärast seda on magnetvälja tugevus erinev, nimelt: kuni selle punktini piki ferromagnetilise keha pöörlemist on magnetvälja tugevus suurem kui pärast seda punkti. Seetõttu on vaadeldava magneti tõmbejõud suurem kui pidurdusjõud, nagu on näha jooniselt 3 iga n püsimagneti kohta. See toob kaasa nurkmomendi kuhjumise ekstsentriku pöörlemise ajal ja viimase pöörlemisliigutuse kommunikatsiooni lõputult, kui tekkiv pöördemoment (joonis 4) ületab hõõrdemomenti (ja sellega seotud koormust).
Mõelge eelkõige ferromagnetilise keha 1 vastasmõjule püsimagnetiga 5 (joonis 1). See püsimagnet asub nii, et selle pikitelg langeb kokku raadiusega R ringi puutujaga AB punktis B. Punkt A asub magnetpooluse tasapinnal ja on selle tasandi lõikepunkt magnetilise pikiteljega. AB. Kaugus OA=R+d ehk punkt A on sellest ringist kaugusel d, nagu on näidatud püsimagneti 7 puhul. Tähistades suhet γ=d/R läbi mõõtmeteta parameetri γ, on lõigu AB väärtus leitud avaldisest r 0 =AB= R(2γ+γ 2) 1/2 . Nurk ΔΘ=2π/n määrab nurkintervalli püsimagnetite paigutuses sümmeetriliselt selle ringi suhtes ja vastava püsimagneti nurgaasend koordinaatsüsteemi X-teljelt mõõdetuna on võrdne Θ i = 2πi/n, kus i=1, 2, 3, ... 12. Ferromagnetilise keha 1 hetkelist nurgaasendit kangiga 2 tähistatakse tähega β ja punkti B nurkasendit ringjoonel X-telge tähistatakse kui β 0i (püsimagneti 5 puhul on punkt B X-teljel, seega nurk β 01 =0). Püsimagnetil 6 nurk β 02 =ΔΘ, püsimagnetil 7 β 03 =2ΔΘ jne ja püsimagnetil 4 β 012 =11ΔΘ. Nurgad β 0i ja Θ i on omavahel seotud konstantse erinevusega Θ i -β 0i =arccos. Lihtsate teisendustega leitakse kaugus ferromagnetilise keha keskpunktist punkti A püsimagneti 5 poolusel (üldjuhul i-nda püsimagneti puhul) avaldisest:
vahemiku 0≤β≤2π jaoks. Püsimagneti 5 jaoks valitakse väärtuseks Θ 1 ΔΘ. Püsimagneti 5 magnetilise pikitelje AB ja ferromagnetilise keha 1 keskpunkti ja punkti A vahelise joone vaheline nurk α leitakse avaldisest:
võttes arvesse trigonomeetrilist pöördfunktsiooni α=arcos Q. Pange tähele, et joonisel 1 on nurk α>π/2, st ferromagnetiline keha asub püsimagneti 5 aeglustavas magnetväljas ja magnetvälja kiirendavas magnetväljas. püsimagnet 6.
Asendades (3)-st leitud väärtuse α avaldisega (1), saame diagrammi ξ(α) seose:
Magnetvälja tugevus punktis, kus ferromagnetiline keha asub magnetpooluse suhtes, määratakse kaugusega r(β) vastavalt punktile (2) ja, võttes arvesse punkti (4), on võrdne:
ja ferromagnetilise keha tõmbejõud F M (β) püsimagneti poolt on määratletud järgmiselt:
kus D = µ 0 µνS 2 Н 0 2 /8π 2 R5, nagu eespool mainitud.
Magnetjõu F M (β) vektor, mis on projitseeritud ekstsentriku kangiga risti, määrab ekstsentriku F M DV (β) magnetilise liikumapaneva jõu, mis on määratletud järgmiselt:
ja mis määrab pöördemomendi M(β)=F M DV (β)R, mille keskmine väärtus on M CP , mis on määratud kõigi n püsimagneti jõudude F M DV (β) integreerimisega intervalliga 0≤β≤2π. , mille kuju on näidatud joonisel fig 3, on näidatud joonisel fig 4, arvestamata hõõrdemomenti ja kinnitatud koormuse momenti.
Kasulik võimsus P BP =M SR ω, kus ω on ekstsentriku pöörlemise nurkkiirus; selle graafik on näidatud joonisel 5 kaldjoonena. Teatavasti on hõõrdejõud (kinnitatud koormus) võrdeline ekstsentriku pöörlemiskiirusega, mistõttu võimsuskadu on kujutatud joonisel 5 paraboolkõveraga. Ekstsentriku pöörlemiskiirus N=ω/2π [pööre/s] suureneb seatud väärtuseni N, mille juures on kasulik võimsus ja hõõrdekadude võimsus ja ühendatud koormus omavahel võrdsed. Seda kajastub graafiliselt joonisel fig 5 kaldjoone ja parabooli lõikepunktina. Seetõttu on tühikäigurežiimis (st ainult pöörlemistelje hõõrdumise mõjul) ekstsentriku nurkkiirus maksimaalne ja väheneb, kui pöörlemistelje külge kinnitatakse väliskoormus, nagu see on tüüpiline. näiteks seeriaühendusega alalisvoolumootorite jaoks.
Kavandatud meetodit rakendava seadme töö põhineb magnetoperioodilise struktuuri ülesehitusel püsimagnetite (või elektromagnetite) pikisuunaliste magnettelgede orientatsiooniga samadelt poolustel piki ringi puutujaid, mis on tsükli trajektoor. ferromagnetilise keha pöörlev liikumine, samal ajal kui ferromagnetilist keha piki ümbermõõtu ühes suunas tõmbav keerismagnetväli tekib magnetvälja tugevuse ülejäägi tõttu pikitelje suunas teiste nurksuundade suhtes, mis on määratud kiirgusmustriga ξ(α) vastavalt avaldistele (1) ja (4).
Pöörlevale magnetväljale adekvaatse keerise magnetvälja tekkeprotsesside mõistmiseks sellises puhtalt staatilises struktuuris on vaja näidata, et ferromagnetilist keha saab liikuma panna kaldu paigaldatud püsimagnetiga nii, et olenevalt ferromagnetilisele kehale mõjuva hõõrdejõu suuruse järgi liigub see või võnke summutatud liikumisega, peatades selle püsimagneti pooluse lähedal, kusjuures püsimagneti punkti A suhtes on ühe või teise märgi nihke peaaegu null ( nagu magnet 5 joonisel 1), või see peatatakse enne või pärast AO joont, nagu on näidatud joonise 2 keskmisel ja alumisel diagrammil. Märkimisväärse hõõrdumise korral peatub ferromagnetiline keha enne AO jooneni jõudmist (positiivne jääknihe). Seda asjaolu on lihtne seletada asjaoluga, et ekstsentrikut käivitav jõud avaldise (7) järgi on võrdeline väärtusega cos(α+β-β 0i), mille argument, kui ferromagnetiline keha asub täpselt punkti A vastas, on võrdne π/2-ga, kuna β=β 0i ja α=π /2, st ferromagnetilise keha keskpunkti täpse kokkulangemise korral AO joonega on liikuv magnetjõud F M DV (β) võrdne nulliga , ja ferromagnetiline keha ei saa hõõrdumise korral kunagi AO joonel positsiooni võtta, arvestamata selle inertsi teel liikumise tegurit. See on näidatud joonise 2 keskmisel diagrammil. Kui hõõrdumine on valitud optimaalseks, tõmbab püsimagnet ferromagnetilist keha intensiivsemalt kui see pidurdab, nii et ferromagnetilise keha kese ületab inertsi abil AO joont, nagu summutatud võnkerežiimis madala voolutugevusega. hõõrdumine ja peatus AO joone taga (negatiivne jääknihe), mis on näidatud joonise 2 alumisel diagrammil.
Need argumendid põhinesid asjaolul, et ferromagnetiline keha oli puhkeasendis või ebaoluliselt aeglase pöörlemisega. Seetõttu on väga väikese hõõrdumise korral (kaasaegsetes laagrites hõõrdeteguri väärtus ≥0,0005) magnetpooluse ja ferromagnetilise keha vaheline kaugus, mille juures magnet hakkab ferromagnetilist keha liikuma panema, üsna suur. (Joonis 2 ülemisel diagrammil on see vahemaa suhteliselt üks). Suure hõõrdumise korral on määratud vahemaa minimaalne (joonise 2 keskmisel diagrammil on see 0,25) ja optimaalse hõõrdumise korral on see vahemaa suurem kui määratud miinimum, kuid väiksem kui maksimaalne (joonise 2 alumisel diagrammil). see võrdub 0,75). Viimane tähendab, et sellise optimaalse hõõrdumise korral saab ferromagnetiline keha piisava kiirenduse ja ületab inertsi abil AO joone nagu väikese hõõrdumisega võnkeliikumisel, kuid pärast poolperioodi võnkumisi peatub, jäädes oluliselt alla AO joonele. Sel juhul peatuks ferromagnetiline keha ja jääks paigale, kui seda ei mõjutaks järgmise püsimagneti 6 kiirenev magnetväli (joonis 1). Kuna seadme käikulaskmisega kaasneb üksainus teade ekstsentrikule välise impulsi momendist ehk sundimine pöörlevale liikumisele, siis optimaalse hõõrdumise korral liigub ekstsentrik inertsi teel, saades iga kord vastu impulsi küljelt. ühesuunaliselt (integraalses tõlgenduses) impulssmomentide mõjutavate püsimagnetite jada, mis toetab ekstsentriku määramatut liikumist tekkivas keerismagnetväljas.
Seega, olles AO joone taga, kogeb ferromagnetiline keha pöörlemissuunas järgmise püsimagneti 6 külgetõmmet ja jätkab liikumist selle poole ning seejärel püsimagneti 7 jne poole. ümmargune. Püsimagnetite süsteem on üles ehitatud nii, et eelmise püsimagneti aeglustav magnetväli surutakse osaliselt või täielikult alla järgmise püsimagneti kiirendava magnetvälja toimel. See saavutatakse püsimagnetite arvu n ja konstantse parameetri γ valimisega, samuti püsimagnetite konstruktsiooniga, mis on määratud konstandiga D. Joonisel 3 on magnetilised liikumapanevad jõud F M DV (β) jaotatud nurkade vahemik 2π nii, et kiirendusjõud ei kompenseerita pidurdusjõude täielikult, kuigi viimaste maksimumid on ligikaudu kolm korda suuremad kui pidurdusmiinimummoodulid (ja mitte kaks korda, mis näitab näidatud osalist kompenseerimist) . Kui suurendate püsimagnetite arvu n, suurendades näiteks raadiust R või vähendades vahet d (st vähendades γ), saate oluliselt nõrgendada pidurdusteguri mõju ja suurendada seadme kasulikku võimsust.
Kui ferromagnetiline keha liigub püsimagnetite rühma suhtes, toidavad pöörlemisolekut sama märgiga pöörlemisimpulsid suletud trajektooril (ringil) paikneva püsimagnetite jada küljelt, mis viib pideva pöörlemiseni. ferromagnetilisest kehast. Nagu eespool märgitud, käivitatakse seade etteantud algse nurkkiirusega ühe välise tegevusega. Statsionaarsest olekust ei saa seade spontaanselt lülituda pöörleva liikumise režiimile, mis iseloomustab seda seadet kõva iseergutusrežiimiga generaatorina.
Kaheteistkümnest püsimagnetist (n=12) koosneva seadme vastav arvutus, mille pooluste ristlõige S=8,5,10 -4 m 2, ferromagnetiline keha kaaluga m=0,8 kg, keha maht ν=10 -4 m 3 ja suhtelise magnetilise läbilaskvusega µ=2200, kangi pikkusega R=0,2 m ja vahega d=0,03 m (γ=0,15) tehti Microsoft Exceli programmi abil püsimagnetite valikul magnetvälja tugevusega poolustel H 0 =1 kA/m väärtusele D=10 -4 n. Nende arvutuste tulemused on kvantitatiivselt esitatud jooniste 3, 4 ja 5 graafikutel.
Ekstsentriku kujul oleva rootoriga seadme puuduseks on selle olulise vibratsiooni olemasolu. Selle kõrvaldamiseks tuleks kasutada dünaamiliselt tasakaalustatud rootoreid mitmest (h) sümmeetriliselt paiknevast ferromagnetilisest kehast, nagu on skemaatiliselt näidatud joonisel 6. Lisaks toob see kaasa seadme väljundvõimsuse (kasuliku) võimsuse h-kordse suurenemise. Varem viidati sellele, et püsimagnetite arv n sellises seadmes peaks olema võrdne n=ph+1. Seega, kui h=3, võib arv n olla võrdne arvudega n=4, 7, 10, 13, 16 jne. See võimaldab oluliselt vähendada rootori poolt vastuvõetud jõuimpulsside vibratsiooni. Lisaks saab ferromagnetiliste kehade sisse teha induktiivpoolid, milles indutseeritakse emf-id. ferromagnetiliste kehade perioodilise magnetiseerumise ja demagnetiseerumise tõttu nende liikumisel magnetsüsteemi suhtes. Huvitav on see, et need emfid. on võnkesagedusega f=Nn ja osutuvad üksteisest 120° faasinihkeks, nagu kolmefaasilisel generaatoril. Seda saab kasutada nõrkvooluenergeetikas moodulina, mis genereerib suurendatud sagedusega (sagedusega 400 ... 1000 Hz) kolmefaasilist vahelduvvoolu, näiteks autonoomsel kosmoselennul güroskoopide toiteks. Kolmefaasiline vool ferromagnetiliste kehade induktiivpoolidest toimub kontaktharjadega varustatud isoleeritud rõngaselektroodide abil.
Lõpuks tuleb märkida, et püsimagnetite arvu n suurenemisega nii, et ΔΘ>2π/n, nagu on näidatud patendinõudluses (joonisel 1 ΔΘ=2π/n), koos parameetri γ vastava suurenemisega. , suureneb segmendi pikkus r 0 ja ferromagnetilise keha tõmbepiirkonnad kattuvad külgnevate püsimagnetitega, mis võimaldab neutraliseerida pidurdustsoonide mõju ja suurendada seadme võimsust.
Nähtus, et staatilisest seadmest saadakse keerismagnetväli ja kaotamata kasutatavate püsimagnetite magnetilisi omadusi, on vastuolus olemasolevate ideedega "perpetum mobile" loomise võimatuse kohta, mistõttu magnetismiprobleemidega tegelevad teoreetilised füüsikud vajavad et leida sellele nähtusele seletus. Sarnased nähtused tuvastas autor, uurides ferromagnetiliste rõngaste liikumist perioodilistes magnetstruktuurides küllastavate magnetväljadega, kasutades ferromagnetite magnetilise viskoossuse teadaolevat omadust, samuti omadust vähendada ferromagnetite suhtelist magnetilist läbilaskvust küllastavates magnetväljades. (A.G. Stoletovi kõver, 1872) .
Kavandatud meetodit rakendava seadme aprobeerimine tuleks usaldada MEPhI-le (Moskva) või Venemaa Teaduste Akadeemia Instituudile, mis on seotud magnetismi ja energia rakendusprobleemidega. Soodustada tuleks leiutise patenteerimist peamistes arenenud riikides.
Kirjandus
1. Ebert G., Füüsika lühiteatmik, tlk. sellega., toim. K.P. Yakovleva, toim. 2., GIFML, M., 1963, lk 420.
2. O.F. Men’shikh, Ferromagnetiline termodünaamiline efekt. Avaldus eelisjärjekorras avamiseks 23.07.2007, M., IAANO.
3. O. F. Men'shikh, Magnetic viskoosne pendel, RF patent nr 2291546 prioriteediga 20. aprill 2005, Publ. pullis. nr 1 10.01.2007.a.
4. O.F. Men’shikh, ferromagnetiliselt viskoosne rotaator, raadiosageduslik patent nr 2309527 prioriteediga 11. mai 2005, Publ. pullis. 27.10.2007 nr 30.
5. O. F. Men’shikh, Magnetic viskoosne rotaator, raadiosageduslik patent nr 2325754 prioriteediga 02.10.2006, Publ. pullis. 27. mai 2008 nr 15.
Meetod keerise magnetvälja loomiseks, mis seisneb selles, et mitu püsimagnetit paiknevad ringi suhtes sümmeetriliselt, püsimagnetite pikisuunalised magnetteljed on joondatud antud ringi puutujatega sellel ringil sümmeetriliselt paiknevates punktides, ja püsimagnetite arv n leitakse tingimusest 2π / n ≤ΔΘ, kus nurk
ΔΘ=arccos, parameeter γ=d/R, a d on kaugus püsimagnetite magnetiliste pikitelgede ja nende pooluste tasandite lõikepunktidest määratud raadiusega R ringini, püsimagnetite jõufunktsioon D ja parameeter γ on valitud nii, et eelmise püsimagneti tekitatud pidurdusmomenti kompenseeris osaliselt või täielikult järgmise püsimagneti kiirendusmoment keerise magnetvälja suunas ja väärtus D=µ 0 µνS 2 H 0 2 /8π 2 R 5, kus µ 0 =1,256 10 -6 H/m on absoluutne magnetilise läbilaskvuse vaakum, µ on ferromagnetilise keha suhteline magnetiline läbitavus mahuga ν, mis interakteerub magnetväljaga, mille tugevus on H o püsimagnetite pooluste tasapinnal nende pooluste ristlõikega S.
Leiutis käsitleb magnetismi füüsikat, ühesuunalise pulseeriva keerismagnetvälja saamist, mis tekitab selles liikuva ferromagnetilise keha suhtes ümbermõõtu tõmbava magnetvälja.
Bogomolov V.I.
Valik märkmeid "Kevadtooted 2011"
Eessõna
Talv on möödas, suvi on tulnud - aitäh Peole selle eest!
Viimase 15 aasta jooksul olen propageerinud ideed teist tüüpi igiliikurite kavandamise põhimõttelisest võimalusest, st reaalsest võimalusest riistvaraliselt ära kasutada loodusjõudude töö vaba energiat. inimkeskkond tarbija vajaduste rahuldamiseks.
Millistest loodusjõududest me räägime? Olen spetsialiseerunud gravitatsioonijõudude vaba töö, tsentrifugaal-inertsjõudude ja Archimedese jõudude "tagasitoomise" võimaluste uurimisele gravitatsiooniväljades, tsentrifugaaljõuväljades, magnetväljades ja elektrostaatiliste jõudude väljades.
Mis on minu lõputu entusiasmi ja aastatepikkuse visaduse allikas? Usun, et looduses on kõik meile teadaolevad jõud looduslike "masinate", mehhanismide töö tulemus., looduse poolt ehitatud ühtse universaalse printsiibi järgi. Nimelt pideva energiavahetuse põhimõte keskkonnas, kui optimaalse energiabilansi kui terviku "automaatse" taastamise viis parameetri lokaalse rikkumise korral " energiatihedus mahu järgi» kõigi teadaolevate konservatiivsete jõudude potentsiaalse energia väljade energiatiheduse radiaalsetes gradientides.
Postulaat : "Selle skeemi järgi tekivad ja realiseeruvad kõik loodusjõud keskkonna loomulikes masinates." Sellise skeemi omadused määravad selliste loomulike masinate töövõime konkreetsetes olukordades ja määravad ära meie võime kasutada osa vabast energiast riistvaras. selline loodusliku energiavahetuse protsess konservatiivsete jõudude tasuta töö füüsiliste mõjude kaudu.
Seega on minu entusiasmi ja sihikindluse allikas usk, et "igiliikurite" leiutaja teadmised looduslike masinate ülesehituse ja tööpõhimõtte universaalsest skeemist, mis genereerivad teadaolevaid interaktsioonitüüpe, võimaldavad tal projekteerida seadmeid ja kunstlikult rakendada kunstlikke energiavoogude ümberjaotamise protsesse avatud tehissüsteemide kaudu, mis orgaaniliselt, ilma loodusevastase vägivallata, sobituvad universaalse energiavahetuse süsteemi.
Sel kevadel on mul ülaltoodud postulaadist uued tõlgendused oma spekulatiivsete eksperimentaalsete seadistuste uute skeemidena "oluliste katsete" jaoks, et tõestada oma hüpoteesi..
Millest veel räägib laevade suhtlemise seadus?
Inimkond on tuhandeid aastaid kestnud tootmispraktika jooksul usaldusväärselt kinnitanud järgmist tõde: loodusseadus "suhtlevad anumad" on vaieldamatu fakt.
Millistest loodusseadustest-tõdedest võib arutlusloogika meile veel rääkida? tuginedes tõele suhtlemisanumate seaduse muutumatu täitumise kohta?
Vaatleme ühenduvate anumate seaduse loodusjõudude toime skeeme 1-a, 1-b, 1-c.
Joonisel 1-a on kujutatud suhtlevate laevade seaduse varianti, kus viimaseks loetakse planeedi ookeaniala. Joonistel 1-b ja 1-c on kujutatud "Archimedeuse hoobade" seaduse varianti hüdrauliliste kaalude näidetel - ühenduslaevad ja hoovakaalud.
Millistele järeldustele saame neid skeeme kaaludes ja võrdledes teha?
Olenemata maailmamere pinnataseme kõikumistest, mis tekivad mis tahes viisil (erinevate jõudude mõjul: klimaatilised, tsentrifugaaljõud, laevade liikumine jne), on planeedi gravitatsioonijõudude töö mõju lõppkokkuvõttes , määrab alati vee massi keskmine konstantne tase ookeanis, mis vastab sfääri spekulatiivselt aktsepteeritud ekvipotentsiaalipinna raadiuse väärtusele, nagu märk võrdlussüsteemis planeedi võrdsete gravitatsioonijõudude toime suuruse kohta võrdsetele ainemassidele.
Tekib ookeani veetaseme soov võtta stabiilne tasakaaluasend võrdlussüsteemi ekvipotentsiaalipinna samas raadiuses. võrdsete vastandlike JÕUDE TÖÖDE võrdsuse tulemusena gravitatsioon ookeanivee "suhtlevates anumates" vedela aine gravitatsioonilisele massile.
Sarnase järelduse saame teha planeedi gravitatsiooni resultantjõudude VABATA TÖÖ pideva ja pideva võrdsuse kohta kaalu-hüdrauliliste ja hoovakaalude võrdsetel massidel, võime teha, arvestades hoobade soovi võtta a. stabiilne tasakaaluasend selle tugisüsteemi ekvipotentsiaalpinna samas raadiuses.
"Sfäärilise" ekvipotentsiaalpinna teatud raadius vastab teatud parameetrile "energiatihedus mahu järgi" gravitatsioonijõudude pidevas igaveses TÖÖPROTSESSIS, sealhulgas nende töös pidevas hüdrostaatiliste rõhujõudude gradiendi loomise ja säilitamise protsessis, näiteks vedelikus planeedil.
Mõiste "energiatihedus" - energiatihedus, kui planeedi aine struktureerimise erimahuline energia, laenasin V. V. Zuevilt tema tööst "Energiatihedus, mineraalide omadused ja Maa energiastruktuur". kvantmehaaniline süsteem. .
Vaatleme joonistel 2-a ja 2-b Archimedese seaduse loodusjõudude, ujukile mõjuvate Archimedese tõstejõudude toimeskeeme ja võrdle neid skeemidega 1-a ja 1-b.
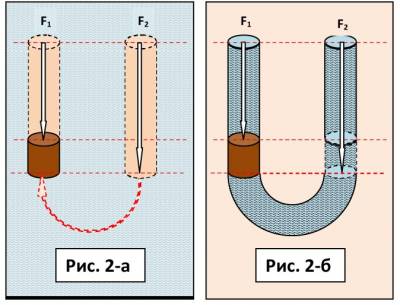
Potentsiaalsete pindade piirid tõmmatakse spekulatiivselt (võrdlussüsteem) läbi ujuki alumise ja ülemise pinna, mis vastab planeedi gravitatsioonijõudude mõju raadiusvektoritele ujuki ja vedeliku massidele.
Archimedese jõud on resultantjõudF A kahekordne survejõud, põhiF 2 ujuki alusel ja pealF 1 ujuki pinnale.F A= F 2 – F 1. Survejõud F 1 ja F 2 igaüks on võrdeline vedeliku kaaluga, st gravitatsioonijõudude TÖÖGA (F gr ) vedeliku "igaüks oma kolonni jaoks". "Sammaste" all peame silmas joonistel näidatud hüdrostaatiliste survejõudude veerge.
Milliseid järeldusi saame teha skeemide 1-a, 1-b ja 2-a, 2-b võrdlemisel?
Joonisel 2-b U -kujuline sideanum, rakendatakse Archimedese seadust ranges kooskõlas joonisel 2-a näidatud tõstvate Archimedese jõudude toimemehhanismi skeemiga, kui vedela massi "sambad" on täpselt kantud mahutavusse. suhtlevate veresoonte vasak- ja parempoolsest harust. Skeem 2-messing loetakse hüdrauliliste kaalude 1-b skeemi analoogiks ja see näitab täielikku vastavust looduslike füüsiliste efektide "suhtlevad laevad" ja "Arhimedeuse jõudude tõstmine" rakendamise mehhanismidele.
Archimedese tõstejõu toimeseadust võib käsitleda kui suhtlevate anumate seaduse erijuhtu ja vastupidi.
Esitagem endale veel üks küsimus. Vastus sellele määrab "igavese liikuri" leiutaja jaoks tema visaduse tegeliku väljavaate. Mis on energiaallikad tõstetavate Archimedese jõudude toimemehhanismi toimimiseks ujukile joonisel fig 2-b sides olevate anumate vasakpoolses harus ja vedeliku taseme hoidmise mehhanismi töötamiseks sideanumate vasakpoolses harus joonisel 1-b?
Joonistel vaadeldavate looduslike mõjude "suhtlevad laevad" ja "tõstvad Archimedese jõud" rakendamise mehhanismide võrdlevast analüüsist järeldub ilmselgelt, et SELLINE energiaallikas on lõppkokkuvõttes gravitatsioonijõudude TÖÖ. õige aastal edastatud ühenduses olevate laevade harud vasakule vedeliku gravitatsioonilise massi "sammaste" hüdrostaatilise rõhu jõugradiendi mehhanismi kaudu (vt näidatud diagrammid näidatud potentsiaaliühtlustuspindade kohta) suhtlev anum.
Seda järeldust kinnitab mehaanika postulaat: "Igasuguse jõu toimemehhanism töötava keha liigutamiseks saab realiseerida ainult ja ainult ALUSEL on teise jõu vastumõju." Arhimedese jõud piltlikult öeldes "toetub" justkui võrdlussüsteemi potentsiaaliühtlustuspindadele, mis on joonistel tähistatud punase punktiirjoonega. See järeldus on oluline hilisemaks arutluseks.
Oma arutluskäigu tulemusena suhtlemissoonte seaduse kohta esitame kolmanda küsimuste seeria ja vaatleme teist tüüpi igiliikuri tööpõhimõttelist diagrammi, mille leiutaja on joonisel 3 välja pakkunud.

Joonisel 3 on kujutatud vertikaalselt asetatud ovaalne toru. Nagu eelmistes näidetes, peame seda vasakpoolsete ja parempoolsete sidesoonte süsteemiks. Korrektsioonipallid on vabalt asetatud torusse Vedelik viiakse mingi välise ajamiga silmusvoolu (vastupäeva).
Küsimused:
1. Kuidas suunamuutus mõjutab c gravitatsioonijõudude ja hüdrostaatiliste rõhujõudude gradiendi etalonsüsteemid, mis tulenevad Archimedese seaduse täitmisest ühenduvate anumate vedelikusambades vedeliku vertikaalse liikumise tingimustes ühenduvates anumates gravitatsiooniväljas. planeet, kui see tõuseb inertsist ülespoole ja kui langeb oma raskuse mõjul allapoole?
2. Kas tuntud vedeliku ülespoole SÕITMISE füüsiline mõju tuntud veetõsteseade tüüpi " õhutransport»?
VD leiutaja vastused:
Juhtmassile mõjuva gravitatsioonijõu suurus muutub selle vertikaalse liikumise ajal koos võrdlusraamiga.
Vasakpoolses torus “langev” vool läheneb kaaluta olemisele ja Archimedese jõudude puudumisele ning inertsist “äratõusv” ülekoormus mõjutab voolu ja Archimedese jõud suurenevad, mistõttu vedeliku vertikaalse liikumise tingimustes tekib tekib nende jõudude ebavõrdsus ja nende töö realiseerub vedeliku massi suunamiseks vastupäeva ühesuunalisesse voolu.
Vastavalt Archimedese seaduse valemile ujuki tõstejõu suuruse kohta, kusg\u003d 9,8 m/s 2 vabalangemise kiirendus; a- vedeliku ajami (starteri) välisjõu kiirendamine silmustoru kaudu voolu; mon ujuki(te) poolt väljatõrjutud vedeliku mahu mass.
F A = mg, kui vedelik EI liigu planeedi gravitatsioonivälja suhtes.
F A vasakule \u003d m (g -a),kui vedelik liigub planeedi gravitatsioonivälja suhtes allapoole suunatud voolus.
FÕigus \u003d m (g + a),kui vedelik liigub planeedi gravitatsioonivälja suhtes ülesvoolus. Siis:
m (g-a) < m (g + a); F A vasakule< F A-l on õigus.
Pärast vedeliku esialgset kiirendamist mööda rõngakujulist toru (ühendavaid anumaid) mõne välise ajamiga ja seejärel selle väljalülitamise hetkel ujukite tõstejõu väärtust loetakse vedeliku voolu suunduva AIRLIFT-DRIVE jõuna (analoogiliselt veetõsteseadmete "airlift" tööpõhimõttega, kus ujukid toimivad kolbidena juhitakse ülespoole suunatud voolu). Selle tõukejõu määrab Archimedese seaduse ja ühenduses olevate laevade seaduse kohaselt:
F Sõit = FÕigus - F A vasak = m (g + a) - m (g - a).
Märge: Sama meetod Archimedese mootori-mootori (ajami) efektiivsuse tõestamiseks variandis Archimedese jõudude jaoks gravitatsiooniväljas on rakendatav Archimedese mootori (ajam) variandi Archimedese jõudude variandis tsentrifugaalsete inertsjõudude väljas. . Kasutasin leiutises Archimedese jõudude töö järgi ajami skeemi teist versiooni, lk Vene Föderatsiooni patent nr 2396681 10.08.2010 "Elektromagnetiline hüdrodünaamiline generaator (EMGDG)". Ma uhkustan siin ainult eeldatava pildiga selle tulevasest välimusest.
Kirjandus :
1. Bogomolov V.I. Vene Föderatsiooni patent nr 2396681 08/10/2010 kohta "Elektromagnetiline hüdrodünaamiline generaator (EMGDG)" http://khd2.narod.ru/authors/bgmlv/bgmlv.htm;
2. Bogomolov V.I. Füüsika M-paradigma. .
3. Zuev V.V. "Energiatihedus, mineraalide omadused ja Maa energiastruktuur" - Peterburi: Nauka, 1995 - 128s.
Kirjast E. Arsentjevile
Tere Eugene!
Jäin pool talve haigeks, lugesin ulmet. Nalja pärast mõtlesin alternatiivsele ajaloole, kus laevade aurumasinad võisid ilmuda paar tuhat aastat varem.
Siin tekkis skeem. Selle eripära seisneb selles, et mida kõrgem on vedeliku voolu vertikaalne "jõu" toru "õhutõste" voolu, seda suurem on Archimedese aurumasina efektiivsus. Seetõttu tuleb osa konstruktsioonist paigutada mitte ainult kere sisse, vaid ka kiilu sisse, näiteks jahil.
Archimedese mootori tööpõhimõttest vastavalt oma EMGDG elektrigeneraatori raadiosageduslikule patendile (mille vastu pole kahjuks keegi juba aasta aega huvi tundnud!) kirjutasin ühele lehele artikli "Millest veel laevade suhtlemise seadus meile räägib?".lisasin kirjale faili. Materjal võib aidata isetegemise entusiastil sellise jahi mudeli ehitamisel aru saada.
Lugupidamisega Vjatšeslav
Auru Archimedese mootor-õhutõstuk Bogomolov
koos Arsentiev jahtidele mõeldud pöörislennukiga

Taastumatule kütusele lisandub kasutaja poolt aurukatla tööks kulutatud energia kaks tasuta taastuvenergia allikat keskkonnast:
1. Moodustatud aurukatla abil vertikaalses torus aurumullid ja konvektiivvoolud lisavad seadmele energiat Archimedese jõudude töö tõttuülesvoolus läbi toru ülespoole ja toimivad seega kolbidena, mis juhivad auru-vee segu voolu torujuhtme kaudu veejoa juurde. Samal ajal ei ole torust allavoolus Archimedese jõudu ega aeglusta voolu. Tänu koonduvale spiraalikujulisele torujuhtmele suureneb voolukiirus düüsile lähenedes.
2. Auru-vee segu läbi otsiku süstitud joa keerismoodustajasse kuuma ja paisutatud töövedelikuna. Moodustunud toroidaalset keerist täiendatakse ühelt poolt pidevalt kuuma töövedeliku vooluga seadmest. Ja teisest küljest töövedeliku pideva jahutamise ja adiabaatilise kokkusurumise tulemusena täiendatakse välja visatud väline vesi sügavusel oleva keskkonna vaba kaasneva rõhu all. Sügavsurve jõudude töö lisab jõumootorile jõudu.
3. Mittevajalike ühikute-energiamuundurite puudumine ühest vormist teise, mehaaniliste käigukastide ja liikuvate mehaaniliste osade puudumine suurendab seadme efektiivsust ja töökindlust.
N.B.: Usun, et planeedi hüdrostaatilise rõhu jõudude vaba töö energia riistvaralise ärakasutamise väidetud põhimõtteline võimalus pöörisveejoa aurumootori-tõukuri skeemis sarnaneb V "implosiooni" põhimõttega. Schauberger.
On veel üks idee. Ahju ja aurukatla rolli õhutõstuki toru sees saab täita kõrgepinge impulsskaarega vee-elektrolüüsiseade otse õhutõstuki toru sees ja põletada koheselt tekkinud vesiniku-hapniku segu mullid (mikroplahvatused) ja tekitada seeläbi toitetorus aurumulle. Elektrolüüsi ja mikroplahvatuste tulemusena ioniseeritakse torus olev vedelik, misjärel on elektriliselt laetud töövedelikuna lisaks aurustamisele võimalik kasutada vastavalt minu ideele. EMGDG patent, elektrienergia genereerimisel magnetohüdrodünaamilise generaatori abil, et toita edasi pingekaare... See on kolmas viis Archimedeuse aurumootori võimsuse lisamiseks keerispropeller-veejoaga.
L.A. Yutkini elektrohüdrauliline efekt (hüdrauliline plahvatus sädemega), mida kasutatakse "joaheitjana" ("YuT" 1957), on kohe vastuvõetav.
Lisatud on sisepõlemisaurumootori skeemi variant.
Auru "boiler" gaasil.
(Valikud: vesinik + hapnik; propaan + õhk)

Lihtne automaatne gaasi väljutamise süsteem põlemiskambrisse töösegu tsükliliseks plahvatamiseks. Prototüüp on sisepõlemismootori kahetaktiline töö.
Esimene gaasikogus põlemiskambris põleva segu moodustamiseks mootori käivitamisel pumbatakse surve all oleva pumba abil käsitsi sunniviisiliselt, seejärel käivitatakse selle plahvatus elektrilahendusega (säde, kaar). , juba ilma välise pumba osalemine.
Pärast kambris toimunud plahvatust süstitakse osa auru-vee segust impulsi abil õhutõstuki torusse ja kambris vabanev ruumala, seega vastavalt laevade ühenduse seadustele hõivab õhutranspordi torust väljuv vesi. . See vesi surub töökambris tekkinud põlevsegu rõhu all õhukella põhimõttel vastavalt õhukella sügavusele reservuaari. Vahetult toimub töösegu järgmine süttimine automaatselt.
Sellises lihtsas kujundusskeemis "sisepõlemisaurumasin" käsitöö tootmisel on kõige keerulisem saavutada torustiku tihedus koos põlemiskambriga ja gaasiventiilide kvaliteet.
Arutluskäik füüsikaliste mõjude teemal Clem mootori töös
(Kuid mitte selle disaini üksikasjade kohta!)
Teeme mõned spekulatiivsed katsed.
Kujutage ette vedelikuga täidetud toru AB. Kaaluge kahte võimalikku mehaanilised viis vedeliku liigutamiseks läbi toru. See on: gradiendi erinevus rõhud vedeliku aine struktuuris piki toru ja massi inertsiaalne jõud vedelad ained.

Kui toru on kinnitatud pöörlevale võllile nii, et see muutub koonuse külgpinna generaatoriks, nagu joonisel 1 (nimetagem seda konstruktsiooni "rootoriks"), siis tsentrifugaaljõu mõjul (CBS) saame jälgida ülaltoodud meetodeid SÕIDA vedelikud voolu. Nende meetodite rakendamiseks peate looma mõned piisavad tingimused , sest neid meetodeid ei rakendata alati tsentrifugaaljõudude valdkonnas.
1. Kui otsa auk AT torud suletud(efekti realiseerumise tingimus), siis torus tsentrifugaaljõudude toimel radiaal rõhu gradient vedelikus maksimaalse rõhuga punktis AT. (DRIVE puudub)
2. Kui augud on pindalalt võrdsed ja avatud, siis CB ei tekita LISArõhku, vaid tekib veel üks tingimus inertsi abil voolu rakendamiseks.
Kui toru otste A ja B augud avatud, ja on vabadus aine massi liigutada tsentrifugaalinertsjõu toimel, siis liigub vedelik radiaalselt läbi toru, kihutades punktist A punkti B. Kui auk A lastakse anumasse (avatud atmosfäär), siis pumbatakse vedelik anumast alt üles vastavalt tsentrifugaalpumba konstruktsioonipõhimõttele (seal on DRIVE). Sel juhul on vedeliku liikumiseks kaasatud mõlemad meetodid (rõhugradient ja tsentrifugaaljõud).
3. Kui meie toru otsad A ja B on omavahel ühendatud teise toruga silmustoru kujul (pöörleb KOOS toruga AB), siis vedeliku mass EI liigu läbi toru, sest silmustorustikus luuakse kaks vastandlikku rõhugradienti, mis üksteist kompenseerivad ja pärsivad. Tsentrifugaaljõud torus AB ei suuda ainet liigutada, kuna puudub vabadus (ei ole DRIVE).
4. Kui virtuaalse katsestendi spetsiifiline konstruktsioon (joonis 2) lubab AB torul (rootoril) jätkata PÖÖRLEMIST LOOPED torujuhtmes, kuid otste ühendav toru fikseeritakse IKKAGI(nimetagem seda disaini "staatoriks"), siis muud spetsiifiline tingimused teostus vedeliku liikumiseks CBS-i toimel, nimelt: nagu joonistel fig 1 ja 2, liigub vedeliku mass radiaalselt piki toru, kihutades ülespoole punktist A punkti B (seal on DRIVE Tsentrifugaalpumba tüüp).
Miks? Sest erinevalt lõike nr 3 tingimustest SELLES silmustorustikus EI LOODA vasturõhu gradiendid kompenseerivad üksteist, kuna gradient survet ei tule üldse, sarnaselt punkti nr 2 skeemile. Üks rõhk on võrdne maksimaalselt rõhk punktis B. Miks? Kuna Pascali seaduse kohaselt kannab vedelik ühtlaselt üle kogu suletud torujuhtme maksimaalse rõhu punktist B, kui toru läbiva voolu ristlõikepindala ja voolukiirus on kõikjal torujuhtmes ühesugused.
Nii hakkas meie stend tööle esiteks kui energia akumulaator, mitte ainult vedela massi pöörlemiskineetiline energia, vaid ka vedeliku massi translatsioonivoolu kineetiline energia. Samal ajal suureneb tsentrifugaalajami tööst tekkiva voolu kiirus CLS-i toimel, kuni see töö kompenseeritakse torude hüdrodünaamiliste takistusjõudude tööga. Sellest lähtuvalt muundatakse hõõrdejõudude töö energia soojusenergiaks ja teiseks töötab alus ka soojusgeneraatorina.
5. Kui eksperimentaalses seadistuses (joonis 3) sisestame täiendavalt turbiini sektsiooni STATOR ahelasse, siis sunnime vedelikku mööda VA rootorit vastupidises suunas liikuma, jõuga, mis on suurem kui tsentrifugaaljõudude jõud, sest vastavalt selle VÄLISE ajami tööks kulutatud energiale vähenevad Coriolise inertsjõud iserullimine rootor.
Me eeldame seda iserulluv Clem masina disaini eesmärk on rootor. On ebatõenäoline, et düüside joad seda funktsiooni täidavad. Ma arvan, et mitte düüsid, vaid düüsid on vajalikud ainult vedeliku jahutamiseks.
6. Vaatleme veel üht projekteerimistehnikat (peale välise ajamiturbiini näite) KUIDAS jõudu liigutage vedelikku mööda torujuhet vastassuunas. vastutöötamine tsentrifugaaljõudude inertsjõudude DRIVE toimimine, mis tähendab tsentrifugaaljõudude jõust suurema jõuga.
Selleks VAHETA osa rootori sektsioonis BA silmusvoolust kanal tuntud mehhanismi "Archimedese kruvi" skeemi järgi. See muudab kruvi pöörleva liikumise vedeliku translatsiooniliseks liikumiseks. Just Archimedese kruvi läbiva voolu edasiliikumine loob kogu silmustorustikus vastupidise voolusuuna, mis on suurema ulatusega ja neutraliseerib rootorivedeliku massi tsentrifugaalinertsjõude.
AB toru asemel kasutame AB kanalit, teeme ROOTORI nagu Archimedese kruvi spiraalkanaliga koonuse kujul, nagu Clem masinal sarnane osa. Koonuskruvi tekitab koonuse otsas suure LUKUSTUSsurve, et neutraliseerida ja alistada tsentrifugaaljõud.
Mida me oma spekulatiivse eksperimentaalstendi sellise skeemiga saavutasime? Energia raiskamine välised ajami abil rootori pööramiseks, rakendab seade vähemalt kahte füüsilist efekti:
A) Tekivad tsentrifugaalsed inertsjõud ja nende jõudude töö tekitab kõrge rõhu silmustorustikus tervikuna Juhin tähelepanu minu poolt propageeritud postulaadile, nimelt Mõju siin tekkiv nähtus “rõhk vedelikus”, kui salvestatud olemasolu nähtus TASUTA energiat vedeliku massi pöörlemisel rootori hoorattas. Miks tasuta? Kuna seda surveenergiat saab tarbija igal viisil tasuta ära kasutada ja pärast seda on rootorit pidurdades võimalik taastada kogu hoorattale kogunenud massi pöörlemise kineetiline energia, mis kulus välise ajami käigus. hooratta pöörlemine. Viide pöörlemiskineetilise energia taastamisele tõestab vedelikus rõhu tekkimise tasuta olemust tsentrifugaaljõudude väljas. Üks võimalus surveenergia kingituse kasutamiseks on vedeliku sisemise struktuuri taastamine.
B) Tekivad Coriolise inertsjõud, mis muundavad TÖÖ ja energia (praegu, oletame, et mis tahes ajami VÄLISallikas) vedeliku massi radiaalsel nihkel rootori ajami TÖÖSSE pöördeks ja pöörlemise kineetiliseks energiaks. rootori vedeliku massist.Ja ka Coriolise jõudude töö loob lisarõhk, "lukustades" tsentrifugaaljõudude TÖÖ tulemusena tekkinud vastasvoolu.
7. Kust saada tasuta energiat ja kuidas moodustada tsentrifugaaljõudude tekitatavale rõhule selline vastuvoolu pea, et moodustada vedeliku massi korralik liikumiskiirus perifeeriast rootori keskmesse (punktist B punkti A) ja seega " korralikud" Coriolise jõud, mis on võimelised "korralikult" enesereklaam rootor?
Pöörake tähelepanu sellistele spetsiifilistele parameetritele, mis ilmuvad seadmesse vastavalt Clem-skeemile, kui selle käivitab (reklaam) välise starteri poolt. AB toru asemel kasutasime koonuskruvi kanalit, mis tehtud arvutuste järgi sellise kujuga, et voolu edasiliikumisel tekkiv rõhk oleks “korralik” b umbes suurem kui tsentrifugaaljõudude tekitatud voolurõhk. Ja see tähendab, et spiraalkanalis, voolus punktist B punkti A, moodustub selline parameeter nagu "kõrge rõhk". Coriolise jõudude töö tõttu "korraliku" rootori kiiruse loomiseks peab vedeliku voolukiirus läbi kanali olema suur. Suurel kiirusel läbi vedelikukanali liikudes tekivad “korralikud” hüdrodünaamilise takistuse ja lihtsalt hõõrdumise jõud - veel üks vedeliku kui töövedeliku ja töökeha omandatud parameeter meie seadmes.
Mida saavad sellised vedeliku omandatud parameetrid meile praeguses arutluskäigu ja spekulatiivse katse etapis anda? Üheskoos VÕIVAD nad luua selleks tingimused ümberstruktureerimine vedelikud .
8. Meil oleks väga hea meel, kui Archimedese kruvi poolt kanalist läbi surutud vedelik paisuks ka kuumutamisel, suurendades mahtu selles kanalilõigul! Kui ainesse salvestatud võimsad molekulaarjõud mängima hakkaksid ja see "taasaktiveeritud" energiaallikas aitaks meil luua "korraliku" voolurõhu suunas B-st A, siis võiks ennustada, et pärast starteri pöörlemist kuni teatud rootori kiirus, siis saab rootor jätkata iseseisvat pöörlemist vedeliku siseenergia tõttu.
Mis sellest saab lahja paisuva vedeliku jõud, mis toimib vedelikumassi AJAMANA voolu, toimides tsentrifugaaljõuga AJALE vastu, et suunata voolu vastupidises suunas? Jõud saab tugineda ainult teisele jõule – mehaanika seadusele. Vastus on selline. Paisuv vedelik paisub Archimedese kruvi poolt moodustatud voolu VA suunas, kaldu Archimedese kruvist lähtuva impulsi VA jõul, Archimedese kruvi poolt JUBA VAREM FORMAATSIOONINUD voolu massi inertsjõul.
On vedelikke, mis kuumutamisel "korralikult" paisuvad. Clem kasutas päevalilleõli vedela töövedelikuna. Hüdrodünaamiline takistus ja hõõrdumine soojendavad vedelikku kõrge temperatuurini. Surve all kuumutamine nihutab temperatuuri piiri, selle faasisiirde mõõtu, keemist, suurendades veelgi ülekuumutatud vedeliku paisumismahtu. Võib eeldada, et selliste parameetritega võib tekkida kavitatsioon ja võib-olla aitab see kaasa ka rõhu suurenemisele ...
9. Vastavalt sellele kuumutatakse vedelikku enne uue tsükli alustamist suletud süsteemis ühes liikumistsüklis (tsüklis), tuleb sundida jahtuma . Näiteks esmalt pihustamine läbi düüside ja seejärel täiendavalt läbi jahutusradiaatori. Ja kui Clemi mootoris, nagu aurumasinas, käivitatakse selle kuumutamisel ja paisumisel aine struktuuri tsükliline ümberkorraldamine, kui see vabastab vedeliku siseenergia, mis on võimeline muutuma mehaaniliseks pöörlemisenergiaks. rootor, siis (!) Keegi ei tühistanud Carnot' tsükli seadust.
10. Aga siis jääb küsimus, kus on vaba energia allikas, mille tõttu lõpuks paisudes vedelik rootorit pöörleb? Minu vastus. Vaba energia allikaks on siin KINGITUSE tekitatud SURVE tsentrifugaalsed inertsjõud.
Hüpoteesi väide . Saavutatakse tehniline lahendus, mis tagas Clem mootori töövõime süsteem järjest (“loopback”) realiseeritav füüsilised mõjud:
Tsentrifugaaljõudude toimeväljas Archimedese kruvi kanalis tekib vaba rõhk (ja tekivad Coriolise jõud);
Survejõudude mehaaniline töö, voolukiirus ja hõõrdumine kanalis soojendavad vedelikku;
Kanalis kuumutatud vedelik paisub ja teeb b umbes suurem vedeliku massi voolu töö AJAMISE töö kui sellele vastanduvate tsentrifugaaljõudude AJAMINE;
Vedeliku voolu töö massi radiaalsel liikumisel perifeeriast keskmesse (tee VA) Coriolise inertsjõudude toimel keerab Archimedese rootori kruvi ise lahti;
Rootori isepöörlemine tekitab tsentrifugaaljõudude välja ja Archimedese kruvi töö ning mis kõige tähtsam, paisuv vedelik paneb liikuma staatorikanalit läbiva voolu, et korrata silmustega vedelikuvoolu uut tsüklit. seade;
Vedeliku vool läbi jahutusradiaatori staatoris loob tingimused Carnot' tsükliks soojusmootoritele.
Seega on Clemas mootori tööks energiaallikaks kaks looduslikku füüsikalist efekti, nimelt: vaba rõhk tsentrifugaaljõudude väljas rootoris ja vedeliku vaba jahutamine väliskeskkonna poolt staatoris. Jahutamise ajal adiabaatiliselt kokku surudes võib vedelik moodustada voolu "imemise" osast rootorikanalist staatorikanalisse, tekitades mootorile täiendavat võimsust.
Clem mootorisüsteem ei ole suletud, see teostab termodünaamilist ja inertsiaalset energiavahetust keskkonnaga ning kasutab selle energiavahetuse käigus ära osa keskkonna vabast energiast.
Leiutise kirjeldus
"Bogomolovi generaator - muundur (GB-K)"
Leiutise mõiste, selle eesmärk .
Seade "GB-K" on mõeldud tarbijale elektrienergia saamiseks alalisvoolu kujul. Viitab taastuvatest loodusvaradest alternatiivseid energiaallikaid kasutavatele elektrijaamadele.
Seadme konstruktsioon on süsteem, kahe avatud süsteemi kompleks, mehaanilised ja elektrilised. Need on avatud (mitte suletud) süsteemid, mis on ühendatud keskkonnaga energiavahetuse ja sealt energia ammutamise teel, aga ka kõik teised teadaolevad alternatiivsed elektrijaamad, päikesepaneelid, tuulikud, hüdroelektrijaamad.
Kuna seade "AK" on avatud süsteem, ei riku selle tööpõhimõte energia jäävuse ja muundamise seadust, mistõttu ei saa seadet "AK" teoreetiliselt klassifitseerida "esimest ja kolmandat tüüpi igiliikuriteks". põhimõtteliselt võimatud seadmed!
"GB-K" erineb selle poolest, et see on alternatiivsed energiaallikad taastuvad loodusvarad füüsikalise vaakumi keskkonna vaba energiat kasutatakse tsentrifugaal-inertsjõudude vaba töö näol, mille seade muundab elektrienergiaks.
"GB-K" on modifitseeritud "GB-1998".

Joonistel 1a, 1b ja 1c on näidatud " pneumohüdrauliline tsentrifugaalkiiruse regulaator (TsRS)» jaoks GB-1998. Selle seadme konstruktsioon vastavalt pöörlemiskineetilise energia ja nurkmomendi jäävuse seadustele näeb tehnoloogias ette mehhanismide automaatse reguleerimise konstantse pöörlemiskiiruse säilitamiseks. Leiutise "pneumohüdrauliline CRS" prototüüp on hoob "Watt tsentrifugaalkiiruse regulaator" (joon. 2).

CRS (joonis 1a, 1b ja 1c) koosneb ühes tükis korpus-rootorist, millel on kambrid vedela massi jaoks: silindrilisest (piki rootori pöörlemistelge) kambrist ja läätsekujulisest kambrist. Läätsekujulise kambri sisse asetatakse survegaasiga täidetud elastne õhupall. See toimib õhkvedruna. Ülejäänud ruum on täidetud raske vedelikuga.
seadmes" Bogomolovi generaator 1998 (GB-1998)"(Joonis 2b) tsentrifugaalkiiruse regulaator (joonis 1a, 1b ja 1c) täidab põhifunktsiooni genereerivad pöörlemise vaba kineetiline energia (mehaaniline energia) tsüklilise kiirenduse ja aeglustuse režiimis (autori oskusteave). Seadmes “GB” paikneb TsRS hoorattana samal võllil ümberpööratava elektrimasina “mootor-generaatoriga” (joonis 2b). Tsüklilise töö ajal kiirendustsüklis genereerib CRS elektrimootori ja hooratas kogub tsentrifugaaljõudude vaba töö energiat; pidurdustsüklis koormuse all oleva elektrigeneraatori takistuse tõttu elektrimootori poolt hooratta CRS-i pöörlemisele kulutatud elektrienergia kosunud, ja CRS hooratta inkrementaalne vaba mehaaniline energia muundatakse elektrimasina (generaatori) abil vabaks elektrienergiaks.
Muudetud seadmes "GB", seadmes "GB-K"
Pneumaatilist-hüdraulilist tsentrifugaalkiiruse regulaatorit (CRS) on struktuurselt muudetud lisafunktsiooni (lisaks täiendava mehaanilise energia genereerimise funktsiooni), nimelt tasuta elektrienergia tootmiseks. CRS-seade muudab oma hooratta mehaanilise töö elektripotentsiaaliks, suurendab vooluahela pinget vastavalt tuntud tüüpi seadme - elektromehaanilise "muunduri" - tööpõhimõttele (leiutise prototüüp). mahtuvusmuundur (trafo) (joonis 4).

GB-K seadme TsRS (joonis 3a, 3b ja 3c) koosneb tahkest korpusest-rootorist, mille kambrid on vedela massi jaoks: silindriline (piki rootori pöörlemistelge) ja läätsekujuline kamber. Elektrit juhtiv vedelik liigub kambri sees vabalt.
Joonisel 3a on kujutatud CRS ilma vedela töövedelikuta. Joonisel 3c on näidatud vedelelektroodi (roheline värv, töövedelik) asend alguses esiteks CRS-i kui muunduri töötsükkel Joonisel 3b on näidatud vedelelektroodi (roheline värv, töövedelik) asend lõpus teiseks arvutipõhise ettetellimissüsteemi kui muunduri taktitunne.
Leiutisekohase prototüübi muunduri tööpõhimõte.
(Vaata abi artikli lõpus)
Tüüpilises mehaanilises muunduris madal sisendpingeU 1U 2, samas kui väljundvool ja sisendvool on samad. Väljundvõimsus ületab sisendelektrivõimsust. See füüsiline transformatsiooniefekt (elektrostaatilise induktsiooni efekt) toimub välise ajami energiatarbimise tõttu mehaaniliseks tööks muutuva võimsusega laetud kondensaatori plaatide eraldamiseks (liigutamiseks).U 1minimaalsel kaugusel. Kui elektroodid viiakse maksimaalsele kaugusele, saavutatakse kõrgem väljundpingeU 2.
Konverter-üksuse TsRS VGB-2011 seade ja tööpõhimõte erineb prototüübist selle poolest, et:
Muutuva mahtuvusega plaatelektroodidega kondensaator on asendatud "Leyden jar" tüüpi kondensaatori analoogiga, millel on keskne varraselektrood ja anuma perifeeria teine elektroodplaat. Leydeni purgi anuma rolli GB-2011-s täidab CRS-i töökamber;
Muutuva kondensaatori prototüübi liikuv tahkis-plaatelektrood asendati GB-2011-s elektrit juhtiva vedelikuga. Vedelelektrood võib vabalt liikuda töökambri keskosast selle perifeeriasse.
TsRS-muunduri tööpõhimõte seadmes GB-2011 (GB-K).
Esimeses taktismuunduri tsükliline töö koos CRS-i kiirendusega, tsentrifugaalsete inertsjõudude toimel CRS-kambris, tehakse mehaanilist tööd laetud pinge eemaldamiseks üksteisestU 1 elektroodid.
Saavutatakse vedelelektroodi radiaalne liikumine tsentraalsest vardaelektroodist kambri perifeeriasse muutuva võimsusega kondensaatorina kõrgem väljundpinge U 2piiratud maksimaalsel kaugusel elektroodide vahel. Selles asendis tühjendatakse kondensaator koormusele esimeses tsüklis suurendatud vaba elektrienergia väärtuse võrra.
Samal ajal, nagu ka GB-1998 variandis, on GB-2011 modifikatsioonis CRS-i kiirenduse esimeses tsüklis, vaba mehaanilist energiat toodab ja akumuleerib vedeliku inertsiaalmass. Skeemi GB-1998 versioonis akumuleeriti tsentrifugaaljõudude inertsjõudude vabal tööl vedela töövedeliku massi tsentrist perifeeriasse tõmbamise mehaaniline energia pneumaatilise vedru abil. elektrostaatiline väljatugevus) Vedeliku-elektroodi massi Coulombi tõmbejõud kondensaatori keskelektroodi suhtes.
Teises taktismuunduri töö, CRS-i pidurdamise ajal, Coulombi jõudude tõmbejõu vaba töö, vedel elektrood naaseb algsesse asendisse, mis on elektroodide vaheline minimaalne vahemaa ja kondensaator laetakse uuesti pingega välise energiaallikagaU 1.Kahetaktiline tsükkel on lõppenud, muundur on järgmiseks töötsükliks valmis.
Samal ajal, nagu versioonis GB-1998, kulutati ka GB-2011 modifikatsioonis ka teises tsüklis "hooratta pidurdamine elektrigeneraatori takistusega koormuse all", mis kulus esimeses tsüklis hooratta ülespööramiseks. CRS elektrimootori abil, välise vooluallika elektrienergia kosunud ja vedeliku massi poolt akumuleeritud mehaaniline energia, mis suurenes esimeses tsüklis ümber pööratava elektrimasinaga(elektrigeneraator) läbi keskküttesüsteemiga ühise võlli (joonis 4) tasuta elekter.
Skeemi GB-1998 variandis kulutati teises tsüklis pneumaatilise vedru poolt akumuleeritud mehaaniline energia nihketööle. massid vedelik perifeeriast keskmesse.GB-2011 skeemi variandis kulub Coulombi elektrostaatilise väljatugevuse potentsiaali poolt akumuleeritud mehaaniline energia ka liikumise tööks. massid vedelik perifeeriast keskmesse. Skeemi "GB" mõlemas versioonis põhjustab vedela töövedeliku massi liigutamine perifeeriast keskele Coriolise jõudude mõju. iserulluv hooratas-CRS.
GB-2011 skeemi versioonis muutub Coulombi elektrostaatilise välja tugevuse potentsiaaliga akumuleeritud mehaaniline energia, Coriolise jõudude töö pöörlemise inkrementaalne kineetiline energia hooratas-CRS ja elektrigeneraatoriga ühise võlli-CRS kaudu edastatuna muundatakse hooratta-CRS-i mehaaniline pöörlemisenergia tasuta elektrisse.
Seega, leiutis "GB-2011-converter" (modifikatsioon "GB-1998") genereerib sama palju tasuta mehaaniline pöörlemisenergia hooratas-CRS, kuid akumuleerib seda tõhusamalt ja muudab selle elektriks. Kui aastal 1998 kulutati osa tsentrifugaaljõudude vabast tööst saadud energiast, kui seda kasutati pneumaatilise akumulaatori poolt, kokkusurutava gaasi soojendamiseks (koos selle soojuse kiirgusega keskkonda), siis kui tsentrifugaaljõudude potentsiaal. Coulombi jõu elektrostaatiline väli akumuleerub, varem kaotatud energia muundab konverter nüüd EMF-iks. Kasutades GB-K generaatorit, saab tarbija kogu tasuta elektrienergia, mis on toodetud pöördatava elektrimasina ja muunduri poolt.
Viide .
NB : Konkreetse GB-K konstruktsiooni korral saab pööratava elektrimasina asendada mootor-generaatorseadmega, mis on efektiivsuse poolest tõhusam.
Natuke teooriat tüüpiliste muundurite kohta.
Neid on mitut tüüpi energia muundurid kasutades elektrostaatilise induktsiooni loomulikku efekti, mis muuta mehaanilist energiat elektrienergiaks läbi mahtuvuse muutused laetud kondensaator. Kondensaatori energiavaru saab arvutada lihtsa valemiga: W=Q 2/(2C). Sellest seosest võime järeldada: kui kondensaatori mahtuvus C suureneb ja kogunenud laeng K jääb muutumatuks (muutumatu, kui kondensaator on toiteallikast lahti ühendatud), suureneb kondensaatorile salvestatud energia. See tähendab, et sellel põhimõttel töötav mehaaniline seade mängib rolli DC generaator.
Muudakondensaatori mahtuvus mehaaniliselt võimalik erinevatel viisidel. Lamekondensaatori valemist [ C=eS/d] näitab, et mahtuvus sõltub kolmest suurusest: läbilaskvus [ e] plaatidevaheline dielektrik, ühe plaadi ühe külje pindala [ S] ja plaatide vaheline kaugus [ d]. Muutes üht või mitut neist parameetritest, on võimalik mehaanilist energiat muuta elektrienergiaks.

Joonisel on skemaatiline diagramm seadme tööst, tüüpilinemehaaniline alalisvoolu muundur, mida kasutatakse saavutada tehniline efekt tööstuslikus praktikas sageli kasutatav loodusnähtus, füüsiline efekt "elektrostaatiline induktsioon».
Tüüpilises mehaanilises muunduris madal sisendpingeU 1teisendatakse kõrgemale väljundpingeleU 2, samas kui väljundvool ja sisendvool on samad ning vastavalt sellele ületab väljundvõimsus sisendelektrivõimsust.
Tüüpilises pöörlevas muunduris, kui üks rootori elektrood on suunatud maandussegmendi poole põhjas, moodustavad need pingele laetud kondensaatori.U 1alumise liikuva kontakti kaudub 1. Kui rootor pöörleb, avaneb rootori laetud elektrood kontaktigab 1ja liigub ülemisse asendisse. Seda pöörlemist neutraliseerivad tõmbejõudF rjoonisel näidatud Kui laetud elektrood puudutab ülemist kontaktib 2, on võimalik eraldada selle kantud laeng kõrgema pinge toimel U 2, kuna kaugus maandatud elektroodini on suurenenud ja nende vastastikune mahtuvus vähenenud.
Elektrijaam "Generaator Bogomolov - Airlift
või veetõsteseade (GB-E)"
Abiellusin mõttega avaldada tasuta survet ( haruldus) tsentrifugaaljõud GB-skeemis DA (airlift) skeemi ideega ujukite odav põhja kastmine või odav töö kompressorõhutransport. Siin toimib GB-E kompressorina.
Tuletage meelde "pneumohüdraulilise CRS" seadme skeemi (vt märkust GB-K kohta)

Ja meenutagem elektrijaama-Airlifti skeemi (mootoriga, mis juhib vedelikku Archimedese mootoriga (JAH) läbi rõngakujulise toru voolu, kus torule on keritud induktiivpool või paigaldatud MHD generaator). Selles skeemis puhur(vt joonisel 2 kasti "õhu väljapaiskumine langevasse voolu") täiendame " klapikarp"põhimõttel CRS üksus on" GB ".

MADALAKULUGA kompressori töövõime tõend GB-skeemi kujul - see on sama, lihtne: tüüpiline (alati müügil) agregatsiooniüksus "mootorgeneraator" tsüklirežiimis "pidurdamine koormuse tõttu generaator" on täielikult kosutab välise toiteallika kulud kiirendustsüklis, vastavalt pöörlemis- ja impulsi kineetilise energia jäävuse seadustele, isegi hooratta puhul, millel on mobiilne kauba raadiuses. Meie puhul on need "raskused" vedelad.
Teine osa sellise MIKST projekti (GB-E) efektiivsuse tõestusest on see, et füüsika "teoreem" ei pea siin enam paika. Teoreemi kohaselt Archimedese jõud (hüdrostaatiline rõhk) läbitungimiskäigus ( uppumine) hõljub (õhumullid) põhja (õhutõstuki toru sügavusele), väidetavalt alati oma vastutegevusega lähtestab järgnev kasulik töö hüpikaken ujuvad. Ja kui CRS-seade "uputab" õhumulle (hõljub) mitte millegi eest? Elekter hooratta kiirendustaktis on ju peaaegu täielikult TAASTUNUD tööd surve sügavusele pidurduskäigus analoogia põhjal tsentrifugaaljõudude poolt üles keeratud vedruga!
Jah, Archimedese jõudude vaba tööga GB-E seade gravitatsiooniväljas osutub suureks, kuid odavaks! Esiteks sobib see odava töölauakatse jaoks. Teiseks tuleb see kasuks sügavate kaevude jaoks, või avamereplatvormile, kuhu tuleb näiteks naftat pumbata. Selline veetõsteseade väljapumpamiseks on väga kasulik. vesi mudaga reoveepuhastites või vee tõstmiseks mineraalne tõug MINESist. Ehk siis igal pool, kus JUBA täna õhutranspordid toimivad, aga siiski KALLIKALT. Ja me anname neile tasuta ronimise üles!
Isegi Malyutka tüüpi kodumajapidamises kasutatavate sukelpumpade tootjad on kohustatud GB-E idee vastu huvi tundma!
Tänapäeval on Harkovis ja Krimmis reoveepuhastite plastikust õhktõstukite mainekaid tootjaid. Need on meie potentsiaalsed partnerid, neid rahastavad linnavalitsused. Kes nendega läbirääkimisi peab, GB-E asjus läbi rääkima? ma ei saa.
Kuid lisaks veel!Kasutamisel radiaalne Archimedese jõud, valik "tsentrifugaalsest inertsiväljast kuni tsentrifuug" mõõtmed on vastuvõetavad isegi mootori jaoks auto. Joonisel on kujutatud pöörlevat platvormtsentrifuugi ja valged kolmnurgad on TsRS-i TASUTA kompressori-klapikarbid (GB-E skeemist)
Siin on näha isegi pretsessioonilise inerkoidi tõukejõud! Nagu E. Linevitš, võib-olla ei vaja auto elektrigeneraatorit, kuid selle veojõu otsevedu toimub ilma veoratasteta.

Niisiis, GB ja Airlift sidumise viis seisneb sisuliselt TsRS-seadme muutmises atmosfäärirõhu ja sisemise hüdrostaatilise rõhuga õhu möödaviiguventiiliks. olemus: kiirenduskäigus kambri keskel moodustub CRS haruldus tasuta. Konstruktsiooni spetsifikatsioonide järgi on CRS kambri vaakum võrdne rõhuga õhutõstuki toru sügavusel ja võrdeline hooratta-CRS pöörlemiskiirusega.See on väike nurkkiirus, mis on tehniliselt lihtsalt saavutatav. olemus: TsRS GB-E töötab tsükliliselt tsentrifugaalina pump(esimeses mõõdus)

Joonisel 4a on kujutatud "GB-E" jaoks mõeldud tühi CRS-kamber koos vedelikuventiilide nr 2 ja õhuklappide nr 1 ja 3 süsteemiga

Joonisel 4b on kujutatud keskküttesüsteemi, sukelkompressori "pöörlemise kiirendamise" tsükkel. Rohelised nooled näitavad kambri veest mahalaadimist tsentrifugaaljõudude toimel ja täitmist atmosfääriõhuga kollase noolega. olemus: TsRS GB-E töötab tsükliliselt tsentrifugaalveepumbana (esimesel tsüklil) ja atmosfäärirõhk teenib häkkimise eest lisaraha, täites veest vabastatud ruumi.

Joonisel 4c on kujutatud CRS-i "pidurdustsükkel", kui sügavuse väline vesi täidab kambri (rohelised nooled) ja Coriolise jõu toimel pöörleb see ise (esimeses kulutatud elektrienergia generaatori TAASTAMISE protsess tsükkel mootoriga) ja ka TASUTA töötab nagu sees standardskeem KOMPRESSOR tõstmine seade "Airlift", mis reedab õhuläätse ülespoole õhutõstuki torusse. (Õhutranspordil on kaks põhimõtet: kas "vaht" või "kolbläätsed".)
See on esialgne eskiis, lihtsalt põhimõte. Võib-olla, nagu piltidel 1, tuleb jätta elastne kott-pneumaatiline vedru ... jne. Vaja võib olla täiendavat vastuvõtja-õhkkella. Seda õhutavad õhutõstjad. Ilma õhutranspordi spetsialistideta on parem mitte mudelit ise ette võtta, seal on delikaatne protsess: kus on vaht ja kus on läätsed ... Aga! Ma garanteerin vedeliku voolu tasuta JUURDE toimimise! Odav ja vihane.
Järelsõna noodivalikule "Kevadtooted 2011"
Vaatasite mu märkmed minu poolt sel kevadel välja pakutud uute skeemide kirjeldusega, väidetavalt üliühtsuse seadmete, "teise tüübi igiliikurite" seadmesüsteemi ja keskkonna loomuliku energiasüsteemi kirjeldusega.
Nagu selle noodivaliku eessõnas märkisin, on looduses kõik meile teadaolevad jõud looduslike "masinate" töö tulemus, looduse poolt ühe universaalse põhimõtte järgi ehitatud mehhanismide töö. Nimelt pideva vahetuse põhimõte energiat keskkonnas optimaalse energiabilansi kui terviku "automaatse" taastamise viisina parameetri kohaliku rikkumise korral " energiatihedus mahu järgi » kõigi teadaolevate energiatiheduse radiaalsetes gradientides väljad konservatiivse potentsiaalne energia jõud.
Teie tähelepanule pakutud minu leiutatud vooluringiskeemides kasutatakse generaatoreid vaba loodusliku energia allikana. skeem Nende "masinate" seadmed, mis on looduse poolt loodud universumisüsteemi energiabilansi "automaatseks" joondamiseks selle alamsüsteemides, on identsed ja universaalsed. Universumi tihedalt pakitud ainelises aines (eetri õhuke aine, sellest õhukesest ainest moodustunud materiaalsete objektide mängulise aine füüsiline vaakum) on lokaalsed ainest koosnevad moodustised ja nende poolt moodustatud jõuväljad. Selliseid jõuvälju on tavaks nimetada "potentsiaalse energia väljadeks" ja need jõud on "konservatiivsed jõud".
Autori sõnul seisneb skeemide ühtsus kõigi nende looduslike "masinate" paigutuses selles, et nende "jõuüksus" jõudude töö avaldumiseks ja rakendamiseks on algselt antud radiaalse gradiendi põhimõte. energiatihedus ja materiaalse aine mass mahu järgi. Selles "jõuseadmes", mida nimetatakse "potentsiaalse energiaväljaks", saame vaimselt määrata kvantiseeritud energiatiheduse tasemetega sfääride ekvipotentsiaalpinnad aktsepteeritud võrdlusraamis.
Autori pakutud tehisseadmete skeemides toimub nende endi tööorganite suhtlemine looduskeskkonnaga OPORA kaudu. gradient keskkonna aine tihedus potentsiaalse energia väljades: keskkonna massi gravitatsiooniväljas, keskkonna massi külgetõmbeväljas tsentrifugaal-inertsjõudude mõjul, tõmbeväljas. keskkonna massist elektrostaatiliste Coulombi jõudude mõjul. Need potentsiaalsed energiaväljad on moodustatud PRIMAARSETE loodusjõudude poolt ja need loovad oma "jõuühikutega" TEISED loodusjõude, "tagasi pöörduvaid" jõude ümbritseva aine külgetõmbavas massis. Taastavate jõudude töö kaudu viiakse läbi just süsteemide energiapotentsiaali "automaatne" joondamine, universaalse energiavahetuse kohalike voogude ümberjaotamine.
Kõik vooluringid on ehitatud "AUM" algoritmi abil, mille on välja pakkunud superühikute (SE) projekteerimise "Universaalne meetod" autor. korraldada ja ümber jaotada energiavahetusvooge keskkonna ja seadme vahel selleks, et osa selle vahetuse energiast ära kasutada.
AUM on aretatud kui tagajärg autori versioonist "M-paradigms of Physics".
AUM- leiutamisprotsessi korraldamine (analoogiliselt TRIZ-iga) ja potentsiaalsete energiaväljade energiat kasutavate seadmete skemaatiliste diagrammide kavandamine, - on sõnastatud järgmiselt:
Kui seadmes kasutatakse tsükliliselt kahte konservatiivsete jõudude potentsiaalse energia vormi, mille töö on vektorite vastupidise toimesuunaga, siis on see LOVAKULU, lülitades perioodiliselt välja (nõrgendades) välja mõju. energia jõuvorm ja teise energialiigi jõudude välja mõju sisselülitamine (tugevdamine) on võimalik (!) Ajas ja ruumis moodustuda positiivne erinevus nende jõudude tegevusvolitused selle kõrvaldamiseks võimsuse erinevus st saada vaba energia tarbijale kasulikku võimsust. Selle saavutab leiutaja teadaolevate füüsikaliste efektide valiku kaudu.
AUM-i, CE-seadmete disaineri kõige üldisema tehnika, kasutamine nõuab autorilt loomingulisi jõupingutusi iga konkreetse skeemi puhul. odav seadme ühe loomuliku vastandliku jõu tegevuse keelamine (nõrgestamine).
Nii et leiutises "EMGDG" (RF patent nr 2396681), mille tööpõhimõte, sh. arutatud esimeses märkuses "Mida veel ...", odav ujukite "vajumise" meetod (Arhimedese jõudude nõrgenemine) leitakse füüsikalises efektis: "Juhtmassi raskusjõu väärtus muutub selle vertikaalse liikumise ajal koos võrdlusraamiga."
Sama kehtib ka EMGDG variandi kohta tsentrifugaaljõudude valdkonnas, kus "juhtmassi tsentrifugaaljõudude mõjujõu suurus muutub selle radiaalse liikumise ajal koos selle tugiraamistikuga".
Sama leidu kasutatakse skeemis “Archimedese aurumasin-airlift” ja “GB-E”.
Arsentjevi keerisveejoas Archimedese aurumasina jaoks avastati veel üks viis võimsuse suurendamiseks hüdrostaatiliste survejõudude töö tõttu.
Hüpoteesis Clem mootori tööpõhimõtte kohta odav tsentrifugaaljõudude mõju nõrgeneb tsükliliselt Carnot' termilise tsükli tehnilise meetodi abil, mis saavutatakse vedeliku adiabaatilise paisumise siseenergia tsüklilise kasutamise ja väliskeskkonna poolt jahutamise tõttu.
Bogomolovi generaatorite perekonna seadmetes, GB-1998, GB-K, GB-E odav vaba pöörlemiskineetilise energia (mehaaniline energia) tekitamise tsentrifugaaljõudude väljalülitamise meetod saavutatakse CRS-i hoorattaseadme tsüklilise kiirenduse ja aeglustamise režiimi seadistamisega. GB-Seda funktsiooni teostab sügav hüdrostaatiline rõhk, need on samuti kavandada meetodid kahest vastandlikust jõust ühe tegevuse nõrgendamiseks (väljalülitamiseks).
Tahaksin väga kokku võtta sõnadega "mida oli vaja tõestada!", Kuid kahjuks ilma leiutatud seadmete töötavate mudeliteta jäävad kõik need "eessõnad" ja "järelsõnad" siiani "edevusteks".
Talv on möödas, suvi on tulnud, aitäh seltskonnale selle eest!
4. peatükk Tsentrifugaaljõud
Venemaa Patendiamet, nagu teate, ei võta patenditaotlusi vastu, kui see kirjeldab "liikumist sisejõudude tõttu". See on õige, kuid me ei tohi unustada, et kõik kehad on eetriga pidevas interaktsioonis ja energiavahetuses ning inertsi nähtusel on eterodünaamiline iseloom. Selles peatükis käsitleme mitmeid lihtsaid lahendusi, mis võimaldavad teil liikuda ümbritseva eeterliku meediumiga suhtlemise kaudu.
Ajakirjas Cassier's Magazine 29. köide 1906. aastal näidati mitmeid skeeme, mille puhul eeldatakse, et rootori spetsiaalse geomeetria abil tekitatakse gaasi või muu elastse keskkonna asümmeetriline siserõhk, mis tekib selle pöörlemisel. Pange tähele, et Louis Cassier avaldas aastatel 1891–1913 (üle kahekümne aasta järjest) huvitavaid artikleid tehnoloogia arengu kohta. Tänu temale on paljud tolleaegsete leiutajate ideed meile nüüdseks teada. Tema ajakirja ingliskeelsed tasuta arhiivid leiate Internetist. Joonisel fig. 28, vastavalt Cassier's Magazine'i teabele, pakuti avalikkusele 1902. aastal.
Riis. 28. Rootor on täidetud gaasi või muu elastse ainega
Kõik neli kereelementi (talad) on varustatud ventiiliga õhu või mõne gaasi sissepumpamiseks. Seade ei hakka ise pöörlema. Alustamiseks tuleb seda käsitsi pöörata. Selle leiutise autor pole meile veel teada. Skeem on väga paljutõotav ja sellel pole disaini lihtsuse osas analooge.
Kaaluge pöördemomendi loomise tingimusi. Oletame, et keha nelja "kiire" sees on gaas või mõni muu elastne töökeha, millel on inertsiaalne mass. Siin on oluline töövedeliku elastsuse tegur, mis tsentrifugaaljõu mõjul surutakse ebaühtlaselt kokku. Kokkusurumatu vedelik selles olukorras ei anna oodatud efekti, kuna see surub igas suunas sama jõuga. Elastne kokkusurutav töövedelik surub korpusele ebaühtlaselt, peamiselt mööda pöörlemisraadiust.
Vektorskeem on näidatud joonisel fig. 29, kus on märgitud tangentsiaalse komponendi olemasolu, mis määrab masina rootori pöörlemise.
Riis. 29. Skeem jõuvektorite asukohaga
Võttes arvesse joonisel fig. 29, võib eeldada, et kokkusurutav elastne "töömass" surub kere tangentsiaalseid külgi suurema jõuga kui radiaalseid, mis tekitab rootori pöördemomendi ja pideva kiirenduse.
Selle skeemi toimivust saab õigustada ainult sellega, et ümbritsevas elastses keskkonnas on reaktsioon elastse töökeha deformatsioonidele. Sel juhul peab selle seadme võllile mõjuv pöördemoment olema samaväärne ümbritseva eeterliku keskkonna "väänamise" mõjuga selle seadme tööpiirkonnas.
Lubage mul muuta joonisel fig. 29 ja pakkuda rohkem "talasid", joon. 30. See ei ole oluline, kuid selle konstruktsiooni puhul suurendatakse õõneskeha "kasulikku" pinda, mis loob jõu tangentsiaalse komponendi. Loodan, et olete selle vanaslaavi päikese sümboliga tuttav.
Riis. 30. Rootor 8 talaga
Joonisel fig. 31, on minu poolt pakutud praktilisteks rakendusteks kosmosesüsteemide toiteallika ja tõukejõu valdkonnas.
Riis. 31. Frolovi rootori element. Näidatud on jõu aksiaalsed ja tangentsiaalsed komponendid
Sel juhul võib oodata mitte ainult jõu tangentsiaalse komponendi, vaid ka selle aksiaalse komponendi avaldumist. Aksiaalse komponendi olemasolu võimaldab saada aksiaalset veo- (tõste)jõudu.
Joonisel fig. 32 on kujutatud rootori teostus, mille valmistamine tahkest kettast nõuab kolmnurksete (lihtsamal juhul) õõnsuste freesimist elastse ja kokkusurutava "töömassi" saamiseks. Loomulikult on vaja veel kahte õhukindlat kaant. Freesimist on võimalik teostada pöördetelje suhtes kaldega (vastavalt joonisel 91 kujutatud ideele), et saada mitte ainult puutuja, vaid ka tõukejõu aksiaalne (tõste) komponent.
Riis. 32. Rootor õõnsusfreesiga
Kas see idee on "sisejõudude tõukejõu" fantaasia või on see praktiliselt kasulik tehnoloogia? Küsimus joonisel fig. 28 - joon. 32 saab praktiliselt kontrollida, kuna need konstruktsioonid on lihtsad ja elastse tööinertsiaalse massi valimiseks on palju võimalusi. Tehakse ettepanek viia läbi ühiskatsed, taotleda patent ja alustada energiaallikate tootmist selle tehnoloogia abil.
Nende ideede avaldamisega eeldan nende edukat kommertsialiseerimist ja soovitavalt minu osalusel. Projekti edasine arendamine sõltub teie tootmisvõimalustest. Alustuseks vajame väikest piloottehast, et uurida arendustöö käigus selle tehnoloogia täiustamise peamisi tegureid ning leida võimalusi selle optimaalseks masstootmisprotsessis juurutamiseks. Täpsema teabe saamiseks on see ja teised projektid näidatud minu raamatus New Space Technologies, 2012.
Liigume edasi reaktiivefektiga tsentrifugaalmasinate juurde, see tähendab Aleksandria Heroni turbiini analoogide juurde. Skeem on näidatud joonisel fig. 33. Traktaadis "Pneumaatika", umbes 120 eKr, kirjeldas Heron erinevaid masinaid, mida reaktiivefekti tõttu käitab suruõhk või aur. Näiteks Heroni "aeolipüül" oli esimene kuulikujuline auruturbiin, mida pöörles tangentsiaalselt paiknevatest düüsidest kõrge rõhu all välja lastud veeaurujugade jõul.
Riis. 33. Aleksandria Heroni turbiin
Heroni turbiin kasutab aururõhku, nagu tänapäevased auru- ja muud gaasiturbiinmasinad, millel põhineb kaasaegne energia. "Aururõhk" – need olulised sõnad istuvad kindlalt kõikide energeetikainseneride ja vedurijuhtide meeles. Surve tekitamiseks peate vett soojendama, see tähendab põletama gaasi, kivisütt, kütteõli. siis hakkab elektrigeneraatori turbiin pöörlema. Härrased energiat, teid petetakse! Tsentrifugaaljõu tulemusena tekib rõhk ilma kütuseta, peaaegu asjata! Seda on teada tuhandeid aastaid, kuid teile pole seda öeldud. või sa unustasid selle.
1760. aasta paiku leiutas Johann Andreas von Segner voolava vee juga toimel põhineva mootori. (Johann Andreas von Segner). Segner ei seadnud endale ülesandeks hankida autonoomselt töötav masin. Ta rakendas vesiveski rootori kiirendamiseks tsentrifugaaljõu kasutamise meetodit - masinat, mis tegi kasulikku tööd, kui sellele juhiti väljastpoolt veejuga. Tema idee olemus seisneb aga selles, et masina võimsus ei sõltu ainult veevoolu kineetilisest energiast. Sellises masinas saab väljalaskeavas tekitada mis tahes joa surve, kuna see suureneb rootori kiiruse suurenemisega: tsentrifugaaljõud kiirendab töömassi ja tekitab rootori voolu sisselaskeavas alarõhu (vaakumi) mõju. . Rõhulangus kasvab. See põhjustab liigset võimsust. Paljud kavandatavad tsentrifugaalmasinad põhinevad "Segneri ratta" üldpõhimõttel. Moderniseeritud Segneri ratta isepöörlemise režiimi võib lihtsustatult ette kujutada, nagu on näidatud joonisel fig. 34.
Riis. 34. Segneri rootor. Vesi siseneb läbi pöörlemistelje
Olulised nüansid. Esiteks eeldusel, et suletud süsteem, ja vesi siseneb rõhulanguse tõttu ise rootorisse ja seda ei pumbata pump, selline rootor kiireneb ise nii kaua, kuni vesi sinna siseneb. Keskel, piki telge, liigub veevool väiksema kiirusega kui väljalaskeava juures, seega peab toru ristlõige sisselaskeava juures olema suurem kui kõigi düüside koguristlõige. Pange tähele, et lisaks pöördemomendile luuakse disainis paarisefekt - aksiaalne tõukejõud.
Veel üks konstruktiivne peensus - töövedelik peab olema kokkusurutav. Algoritm sisaldab tsentrifugaaljõududest ja paisumisest tingitud kokkusurumise faase, samas kui süsteemis tekib täiendav kineetiline energia kokkusurumise potentsiaalse energia vabanemise tõttu. Voolu kineetilise energia suurenemist saame kasutada turbiini tiivikutel või muul viisil. Nende tingimuste täitmiseks on vaja lasta veel liikumise ajal tsentrifugaaljõudude mõjul kiireneda. Teoreetikud nimetavad selle liikumise optimaalseks trajektooriks muutuva raadiusega logaritmilist spiraali, mis on näidatud joonisel fig. 35.
Riis. 35. Logaritmiline spiraal
Mõnel kaasaegsel tsentrifugaalpumbal ja ventilaatoril on juba just selline labade konstruktsioon või töömassi liikumise trajektoor, seega on need väga tõhusad. Lihtsustatud versioonis annab veemassi liikumine mööda lamedat või koonusekujulist spiraali koos raadiuse suurenemisega veele võimaluse kiirendada ja tekitada rootorile täiendavat pöördemomenti.
Võib-olla on õhu kasutamine töömassina lihtsam, kuid see on palju kergem, seega on pöörlemiskiirused palju suuremad ja see nõuab pöörlevate masinaosade kvaliteetset valmistamist ja kere töötlemist (poleerimist). Teoreetiliselt pole kõik väga keeruline.
Vaatleme kõige kuulsamat ja usaldusväärsemat näidet nende põhimõtete kohaselt töötava tehnilise seadme rakendamisest: Clem-mootor, mis kasutab isepööramiseks tsentrifugaaljõudu. 1972. aastal töötas Richard Clem USA-s Dallases rasketehnika operaatorina. Ta märkas, et tavaline kuuma asfaldiga sprinkler jätkas pöörlemist veel tund aega pärast selle ajami väljalülitamist. Sellise masina telg on vertikaalne ja rootor on koonilise kujuga. Klemm teooriat ei teadnud, ta hakkas asja empiiriliselt uurima ja ehitas isepöörleva "Clem mootori". Joonisel fig. 36 on skemaatiline diagramm sellisest generaatorist, mis võib kasutada tsentrifugaaljõudu, et liigutada vedelat massi mööda koonusekujulist paisumisrada.
Riis. 36. Clemi generaatori elektriskeemi variant
See pole Clemi algne skeem, vaid tema idee konstruktiivse teostuse variant. Joonisel fig. 37 näitab selle konstruktsiooni teist skemaatilist diagrammi. Kooniline rootor asetatakse koonilisse korpusesse ja sellesse on lõigatud spiraalsed kanalid. Need spiraalsed rajad kulgevad piki koonust ja lõpevad selle põhjaga düüside (düüside) kujul. Teoreetikute ja praktikute soovitused sarnaste struktuuride loomiseks on, et vedelikule tuleb "anda võimalus juurduda", kuna sellele mõjub tsentrifugaaljõud.
Riis. 37 Clem ajami tööpõhimõte. Disaini võimalus
Selleks peaks spiraali samm suurenema raadiuse suurenemisega, samuti on soovitav suurendada selle kanali ristlõiget, mille kaudu vedelik düüsile lähenedes voolab. Clemi mootorit käsitlevates artiklites seda ei märgita, kuid seda eeldatakse teoreetiliselt.
Spiraaltoru, mida mööda liigub töötav vedelikumass, mille samm ja ristlõige suurenevad pöörlemisraadiuse suurenedes, nimetatakse "antiloopi sarveks".
Siin on mitu tegurit. Asi pole ainult reaktiivses Segneri efektis. Spiraalis liikuva vedeliku kiirendus, mis suhtleb rootoriga, viib selleni, et see kannab pöördemomendi rootorile. Rootori sissepääsu juures on vedeliku kiirus võrdne rootori pöörlemiskiirusega. Düüsi ees olevas trajektoori lõigus liigub vedelik kiiremini kui rootor (kiiruse kasv on tingitud tsentrifugaalefektist). Seega rootor kiirendab ja teatud pöörlemiskiirusel saab välise ajami välja lülitada ja masin lülitub energiageneraatori režiimile. Joa kineetilise energia optimaalseks kasutamiseks pärast düüsist väljumist on konstruktsioonis soovitav kasutada kaldreflektoreid - turbiini tiiviku labasid.
Seega on sellel disainil kolm peamist aspekti:
1. Reaktiivne Segneri efekt kiirendab rootorit.
2. Vedeliku kiirendus, kui selle liikumise raadiust on võimalik tsentrifugaaljõu mõjul suurendada, viib selleni, et see liigub kiiremini kui rootor ja annab sellele täiendava pöördemomendi.
3. Juba düüsist välja lennanud ja rootorile paigaldatud turbiini tiivikuga "töötava" veemassi reaktiivne interaktsioon kiirendab lisaks selle pöörlemist.
Richard Clem ehitas masina, mis kasutas Mazola toiduoliiviõli, kuna töötamise ajal oli vedelik väga kuum (kuni umbes +150 kraadi Celsiuse järgi) ja vesi läks keema. Võib-olla tuleb kasutada ka õli, sest see vedelik on suurema elastsusega kui vesi. Clemi tegeliku konstruktsiooni kohaselt suruti vedelik õõnsasse võlli rõhuga vahemikus 300–500 psi (21–35 kg/cm2), lasti läbi koonuse tihedate spiraalsete kanalite ja väljus düüside kaudu. See põhjustas koonuse pöörlemise. Võlli pöörlemiskiirus Clemi disainis jõudis 2300 pööret minutis. Töövedeliku jahutamiseks kasutati soojusvahetit (radiaatorit).
On teada, et esimene mootor ei pidanud koormustele vastu ja kukkus kokku. Clem muutis mootori teise versiooni vastupidavamaks. Selles versioonis oli mootori võimsus umbes 350 hj. ja kaalus umbes 90 kg.
Richard pani oma mootori autole ja demonstreeris oma tööd reisidel. Akut kasutati ainult auto mootori ja esitulede käivitamiseks. Leiutise autori sõnul koosnes elektrijaam seitsmeastmelisest pumbast (seitsmeastmelisest pumbast) ja muundurist. Pumpa, nagu autor seda kirjeldas, kasutati "rõhu all oleva õli tarnimiseks hoidlast konverterisse, kus energia muudeti mootori pöörlemiseks piisavaks jõuks". Õli naasis paaki ja töövedeliku liikumistsükkel jätkus uuesti. Konverter, see tähendab energiamuundur, toimis nagu turbiin, kuid "ei olnud turbiin selle sõna tavalises tähenduses", nagu ütles Clem.
Riis. 38. Fotol vasakul: algse kujunduse detailid. Paremal - arvutimudel
Leiutaja otsis tuge finants- ja tööstusringkondadest, veendes neid kergesti selle tehnoloogia eelistes. Ta ütles kord, et kui autotööstus aktsepteeriks tema uut leiutist, saaksid autojuhid tema mootoris õli vahetada ainult iga 150 000 miili järel, kuid ei osta kunagi vahepeal bensiini.
Clemi mootorit testis Bendix Corporation. Katse seisnes mootori ühendamises dünamomeetriga, et mõõta mootori isepöörlevas režiimis genereeritud võimsust. Ta andis stabiilselt välja 350 hj. 9 päeva järjest, mis hämmastas Bendixi insenere. Seejärel sai Richard Clem söeettevõttelt tõsise tellimuse mitme võimsa masina valmistamiseks, kuid suri ootamatult südamerabandusse.
Selle leiutise ajaloo üksikasjad on postitatud Jerry Deckeri (Jerry Decker) KeelyNeti lehele. Tema saidi aadress on mulle juba ammu tuttav, soovitan teil teemat üksikasjalikult uurida: www.keelynet.com
Mehaaniliste tsentrifugaalmasinate teooria, mis on võimelised töötama isepöörlemisrežiimis, nõuab tõsist uurimist. Üldiselt võib öelda, et tsentrifugaaljõud ja muud inertsiaalsed mõjud kuuluvad eterodünaamika valdkonda. Inerts on keha ümbritseva keskkonna omadus. Need on välised jõud, mitte suletud süsteemi sisemised jõud. Sarnaselt aerodünaamikale tekib sellises avatud süsteemis keskkonna rõhugradiendi olemasolul tõuke- või tõstejõud ning mõnel juhul mõlemad komponendid.
Lihtsaimas versioonis suurendab tsentrifugaaljõud keha potentsiaalset energiat ilma primaarallikast energiat kulutamata ning disaineri ülesanne pole mitte ainult töömassi "vabastamine" ja sellel liikumine. tsentrifugaaljõu toimeliin, kuid samal ajal selle kineetilist energiat tõhusalt kasutada.
See teema on väga paljutõotav, kuna seeria masstootmise korral võivad sellised masinad muutuda laialdaselt kasutatavateks lihtsateks, usaldusväärseteks ja odavateks energiaallikateks. Praegu, 2012. aastal, tegeleme tsentrifugaal-pöörisenergia muunduri loomisega. Põhineb Schaubergeri mootoril. Valmis on uurimisaruanne koos võimsusarvutustega ja dokumentatsioonikomplekt 30 kW ajami valmistamiseks. Üksikasjad veebisaitidel www.faraday.ru ja http://alexfrolov.narod.ru
Mõelge mitte vähem kuulsale kui Clem mootorile ja varem ka isepöörlevale Schaubergeri energiageneraatorile. Meie ülesanne ei ole kaaluda võimalusi õhusõidukite konstruktsioonides kasutatava aktiivse (mittereaktiivse) tõukejõu loomiseks. Viktor Schaubergeri leiutisi käsitleme vaid tehniliste lahendustena, mis on praktiliselt kasulikud uute energiaallikate arendamiseks. Siiski märgime, et mõlemad liikumapanevad komponendid (aksiaalne ja tangentsiaalne) võimaldavad kasutada sellist masinat nii energiaallikana kui ka aktiivse (mittereaktiivse) tõukeseadmena näiteks õhusõiduki või muu transpordivahendina. lennu-, mere-, jõe-, maantee- või raudteetranspordi jaoks.
Leiutaja Viktor Schaubergeri ajalugu on väga huvitav, eriti seetõttu, et ta leidis kõik oma masinate põhimõtted looduse vaatlustest. Tema põhitöökoht on metsandus Austrias, kus ta töötas välja agrotehnilisi tehnoloogiaid, mis kajastuvad tema patentides.
Selle paigaldamise üldine skeem on meile juba Clemi töödest tuttav. Masina versioon, mis on näidatud joonisel fig. 39, vasakul, soovitas Leopold Sheriju. On teada, et seda ei rakendatud, kuna sellel on vigu. Nõus, skeem on väga sarnane Richard Clemi disainiga, kuid Sherjul pole koonusrootorit. Minu arvates on see puudujääk kriitiline. Vedeliku pöörlemine tekitab tsentrifugaaljõu, mida peame kasutama töövedeliku kineetilise energia suurendamiseks. Selle tingimuse täitmiseks peab vedeliku pöörlemisraadius järk-järgult suurenema, eelistatavalt mööda logaritmilise spiraali trajektoori, mis võimaldab tsentrifugaaljõu mõjul suurendada vedeliku kiiruse radiaalset komponenti.
Riis. 39. Leopold Sherzhyu generaatori (vasakul) ja Frolovi tsentrifugaalmasina (paremal) skemaatiline diagramm
See lahendus on välja pakutud joonisel fig. 39, paremal, Frolovi kujundus, 2011. a. Hetkel on arenemas töötava Schaubergeri generaatori loomise projekt ning kutsume projektist osa võtma huvitatud investoreid ja tootmispartnereid.
Huvitav, kas Richard Clem teadis Viktor Schaubergeri loomingust? See näib ebatõenäoline, kuna Richard töötas raskete seadmete, eriti kuuma asfaldipritsimise lihtsa operaatorina. Tõenäoliselt on need kaks leiutist kaks sõltumatut projekti, mille kaalumisel on kasulik leida analooge ja teha järeldusi seda tüüpi masinate projekteerimiseks.
Fotod originaalsest Schaubergeri seadmest, mida hoitakse Austria muuseumis, avaldatakse Schaubergeri perekonna loal, nende veebisait www.pks.or.at Joonisel fig. 40 on kujutatud autor ja tema "kodugeneraator". Vesi siseneb ülalt, koonuse kitsas osas. Tuleb märkida, et lisaks veele on torudes alati ka väike kogus õhku ja seda tingimust peetakse seadme edukaks tööks vajalikuks. Fotol on kuulikujuline õhufilter. Masina seadistamisel oli oluline valida klappide ja juhtkraanide abil torudesse vajalik vee ja õhu kombinatsioon.
Riis. 40. Viktor Schauberger ja tema "kodugeneraator"
All vasakul on elektrigeneraator ja rihmaratas. Rootor on valmistatud vasktorudest, mis keerduvad ümber koonuse, nagu on näidatud joonisel fig. 41.
Riis. 41. Seade Schaubergeri muuseumis Austrias
Aereeritud vedelikul on elastsus, mis võimaldab tal koguda potentsiaalset energiat vedeliku kokkusurumisel tsentrifugaaljõudude toimel ja seejärel muuta see rootori kineetiliseks energiaks. Oleme selle nüansi juba märkinud: töövedeliku elastsus on sellistes konstruktsioonides vajalik potentsiaalse energia muundamiseks. Tsentrifugaaljõud surub töömassi kokku, see suurendab potentsiaalset energiat. Veelgi enam, raadiuse suurenemisega spiraalis liikudes muundatakse see energia töömassi kineetiliseks energiaks, selle kiirenduseks ja ka rootori pöördemomendi suurenemiseks.
Lisaks on vajalik elastne keskkond, kuna kokkusurumatud vedelikud ei saa liikuda pidevas voolus kiirendusega, ilma katkestuste ja turbulentsita.
Schaubergeri masina otsiku huvitav disainifunktsioon: kasutatakse sisendit, mis ei pöörle, vaid tekitab toru väljalaskeava juures vee spiraalse pöörlemise, joon. 42.
Riis. 42. Otsik toru otsas "kodugeneraator" Schauberger
See tehniline lahendus on laialdaselt tuntud seadmete projekteerijatele, mille puhul on vaja suurendada joa kiirust düüsi väljalaskeava juures. Veevoolu pöörlemise tekitamisel ümber oma telje tekivad selle perifeeriale mikropöörised, mis täidavad omamoodi laagri "pallide" rolli, mis vähendab vee hõõrdumist vastu toru seinu. Meie disainis, mida arendame sarnase skeemi järgi, on joonisel fig. 39, õige, kehtib sarnane lahendus. Teema on paljulubav, arvutused näitavad, et 30 cm raadiusega rootor suudab 3000 p/min juures anda võllile 40 kilovatti võimsust. Üksikasjad - saidil http://alexfrolov.narod.ru
Teadaolevalt ei astunud Schaubergeri seade mitte ainult isepöörlemisrežiimi, vaid tekitas ka suure aksiaalse (vertikaalse) tõukejõu. Üks Schaubergeri seadeldistest tõusis testimise käigus õhku, läbistas katuse ja hävitas osa hoonest.
Leiutaja saatus viis ta Ameerikasse, kus ta tülitses partneritega, kuigi tema generaator töötas väga hästi. Pärast ingliskeelse lepingu allkirjastamist, millest ta aru ei saanud, naasis Schauberger Euroopasse. Hiljem sai ta teada, et lepingu alusel andis ta kõik oma arenduste õigused ameeriklastele üle ning tal endal pole enam õigust nende õpingutega tegeleda.
Jevgeni Arsentiev räägib sellest ja teistest selleteemalistest kujundustest üksikasjalikult oma veebisaidil www.evgars.com. Samuti on teada Moskva autori Jevgeni Stepanovitš Papušini katsed ehitada sarnase tööpõhimõttega "isepöörlevat masinat", kuid tema skeemid ja tulemused pole avaldamiseks kättesaadavad.
Sarnane arendus õhu abil oli teada 1960. aastatel USA-s. Kirjutas Karl Haskell. Praegu töötab seda välja Ron Rockweli juhitud meeskond. Sellel leiutisel pole patenti ja teavet on väga vähe, kuid selle isemajandava turbiini omadusi võib märkida: pöörded ulatuvad 100 tuhande pöördeni minutis. Turbiinile antakse suur elektripotentsiaal, ilmselt hõõrdumise vähendamiseks, seetõttu ioniseeritakse õhk töötamise ajal.
Toon veel ühe näite tsentrifugaaljõudude ehk eetri rõhugradiendi kasutamisest pöörleval kehal energiavormide muundamise efektiivsuse tõstmiseks. 1999. aastal koostasin ettekande Peterburi ülikoolis toimunud konverentsile teemal "Väga tõhus vee elektrolüüs". Pakuti välja tehniline lahendus gaasi moodustumise tingimuste muutmiseks elektroodide pinnal. See lahendus oli raku pöörlemise loomine. Kavandatud skeem on näidatud joonisel fig. 43.
Riis. 43. Tsentrifugaalelektrolüsaatori Frolov skeem
Leiutise olemus seisneb selles, et pöörlemisel tekkivad tsentrifugaaljõud mõjuvad gaasikihile ja rebivad selle elektroodide pinnalt lahti. Selles konstruktsioonis kogutud gaas (vesinik) kogutakse pöörlemistelje lähedale ja seda saab sealt kasulikuks kasutamiseks eraldada. Selle konstruktsiooni puhul pidi hapnik atmosfääri paiskama (augud kaanes). Protsessi efektiivsust määrava tsentrifugaaljõu suurus peab olema maksimaalne, mida piiravad vaid projekteerimisvõimalused. Ajami energiakulu on vajalik rootori kiirenduse etapis, kuid pöörlemise säilitamiseks on vaja minimaalseid kulusid. Selles tsentrifugaalses elektrolüsaatoris määrab efektiivsuse optimaalsete tingimuste loomine veemolekulide polariseerimiseks elektroodide pinna lähedal, kui sellel puudub gaasikile (või selle mõju osaline vähenemine). Tegelikult vähendab see meetod esialgset dissotsiatsioonipinget, mis viib energiatarbimise vähenemiseni. Projekti arendamine ja katsetused minu pakutud meetodil on võimalikud, kui leidub antud teemast huvitatud klient. Ma ei ole seda meetodit patenteerinud. Selle välismaised analoogid on tuntud näiteks Jaapani teadlase Ohmasa (Japan Techno) töödes, elektrolüsaatoris kasutatakse madala sagedusega vibratsioone ja need tagavad täpselt vee pöörlemise, mitte ainult vibratsiooni, mis eemaldab tõhusalt gaasikiht elektroodide pinnalt. Tehnoloogiat on kirjeldatud rahvusvahelises patendis WO 03/048424A1, mis esitati 2004. aastal.
Teise tsentrifugaalelektrolüüsi meetodi töötasid välja autorid Studennikov V.V. ja Kudinov, Venemaa taotlus nr 2003104497/12, 17. veebruar 2003. Rahvusvaheline taotlus PCT/RU 03/00413, 18. september 2003 “Installation for water decomposition by electrolysis”. Nende leiutis kuulub elektrokeemia valdkonda. Skeem on näidatud joonisel fig. 44.
Riis. 44. Studennikovi ja Kudinovi pöörleva elektrolüütielemendi skeem
Autorite kasutatud elektrolüüdi keemilise koostise eripäraks on see, et see sisaldab raskeid anioone ja kergeid katioone. Elektrolüüt juhitakse suurel kiirusel pöörlevasse rootorisse. Elektrolüüdis olevate tsentrifugaaljõudude väljas jagatakse keskkond kergeteks ja rasketeks ioonideks, mis põhjustab radiaalse potentsiaali erinevuse ilmnemise ja seejärel elektrivoolu ilmnemise, mille ahel suletakse pöörleva voolu kaudu. metallist rootor. Ajami võimsus oli autorite katsetes 5 kW. Pöörlemiskiirus - 1500 kuni 40 000 pööret minutis. Seega ei ole siin elektrolüüsi jaoks vaja välist toiteallikat. On vaja viia elektrolüüt pöörlema ja seejärel tekib elektrolüüdis potentsiaalide erinevus, mis toetab dissotsiatsiooniprotsessi. Kui välisahel on suletud, voolab selles juhtivusvool, mis võib anda kasulikus koormuses märkimisväärse võimsuse, samal ajal kui protsess toimub gaasi (hapniku ja vesiniku) vabanemisega elektrolüüdist.
Happelise elektrolüüdi kasutamisel tekivad pöörlemistelje lähedal positiivsed vesinikuioonid. Olles saanud metallkorpusest elektronid, rekombineeruvad need vesiniku molekulideks. Raskemad anioonid kogunevad pöörleva ruumala perifeeriasse, loovutavad metallrootori korpusele elektrone, mis viib hapnikumolekulide moodustumiseni.
Tsentrifugaaljõudude toimel surutakse kerged hapnikumolekulid raskemate ioonide poolt pöörleva elektrolüüdi mahu telje suunas. Võlli aukude kaudu eemaldatakse pöörlevast mahust tekkivad hapniku- ja vesiniku molekulid ning suunatakse need tarbijale. See vee lagunemise elektrokeemiline reaktsioon on endotermiline, see tähendab, et see võib jätkuda ainult soojusvahetuse juuresolekul väliskeskkonnaga. Selleks siseneb pöörleva mahu perifeeriasse mahajahtunud sade soojusvaheti sisselaskeavasse ja ümbritseva õhu temperatuurini kuumutatud elektrolüüt suunatakse pöörleva mahu keskossa. Väljastpoolt puhta vee lisamine on vajalik, kuna vesi laguneb hapnikuks ja vesinikuks.
Autorite-arendajate sõnul neeldub teoreetiliselt iga tarbitud mehaanilise võimsuse vati kohta väliskeskkonnast 20 kuni 88 vatti soojust, mis vastab veest toodetud gaasi kogusele. See tähendab kasutegur 20:1 või isegi 88:1. Sellise konstruktsiooni puhul võimaldaks üks kuupmeeter elektrolüsaatori tavapärasest töömahust toota 3,5 kuupmeetrit vesinikku sekundis.
Kui omal ajal äratas autorite info nende arengu kohta suurt huvi investorites, ka välismaistes, siis hiljem ei leidnud paljud autorite väited katseliselt kinnitust. 2010. aastal ei ole see projekt veel jõudnud kommertsialiseerimise tasemele. Teemaga tegeles Moskvas Alambik Alfa. Kasulikud artiklid teemal "Studennikovi kemoelektriline gravitolüüs" avaldas Andrei Fadejevitš Makarov Kemerovost. Lisainfot leiab ajakirjast Uus Energia, meie kodulehelt.
Me ei käsitle üksikasjalikult soojuse tootmist kavitatsiooni abil erinevate vee pöörlemismeetoditega. Soovin, et uuriksite keerissoojusgeneraatorite (VTG) põhitõdesid, soovitan Internetist leida Juri Semenovitš Potapovi tööd. Minu arvates on sellistes seadmetes liigne soojusenergia ka eetri vaba energia muundamise tulemus töövedeliku pöörlemise ajal tekkivate tsentrifugaalsete inertsiaalsete efektide abil: pöörlemine tekitab survet, töövedelik ja selle potentsiaalse energia suurenemine, mida saab kasutada autonoomsete energiaallikate loomiseks. Kõik muud efektid kavitatsiooni tüüpi seadmetes on teisejärgulised.
Muide, üht neist VTG kaudsetest mõjudest uurisime ühisprojektis Valeri Vladimirovitš Lazareviga, Peterburi ülikoolist. Meie katse idee oli kavitatsiooni mõju kontrollimine radioaktiivsuse astmele vedelik, mis ringleb WTG-s. Oleme kahe erineva katsega edukalt näidanud, et kavitatsiooniprotsess ei vähenda mitte ainult vedeliku enda radioaktiivsuse taset, vaid ka üldist radioaktiivset tausta töötava WTG ümber. Üksikasjad leiate meie veebisaidilt www.faraday.ru.
Sellel põhimõttel põhinevate energiaautonoomsete seadmete loomisel on praktilisi edusamme edukalt ja pikka aega arendatud, näiteks Potapovi "kvantsoojuselektrijaamad", joon. 45.
Riis. 45. Kaheastmelise elektrijaama skeem KTES Potapov
Neis ei soojendata mitte ainult vedelikku, vaid tekib ka pumpadele ja välistarbijale vajalik elekter. Mõelge skeemile: Pump 6 pumpab vett "tsüklonisse" 3 ja pärast vee kiirendamist väljub see läbi düüsi 9 hüdroturbiini 11, mis on ühendatud elektrigeneraatoriga. Alumises mahutis 13 on paigaldatud teine hüdroturbiin 14, mis on samuti ühendatud elektrigeneraatoriga. Keerissoojusgeneraatori düüsi 9 väljalaskeava juures on töökeskkonna temperatuur umbes 70–100 kraadi Celsiuse järgi ja rõhk 8–10 atm. See vool annab esimese turbiini. Alumises anumas asuvat turbiini juhib ülemisest anumast oma raskuse all liikuv vedelik. Seega samaaegselt soojusenergia tootmisega, mille vastuvõtmise tagab soojusgeneraator 1, toodetakse paigaldises elektrienergiat. Selle elektri ja soojuse saamine ei nõua kütusekulu, selle tootmine on keskkonnasõbralik. Meil puuduvad andmed selliste elektrijaamade tootja, katseprotokollid ja kasutuskogemuse kohta.
Raamatust Factor Four. Kulud - pool, tagastus - kahekordne autor Weizsäcker Ernst Ulrich vonIsolatsiooni loov jõud Darwin leidis oma teooriale tugevaimad tõendid saarte elupaikadest, nagu Galapagose saared. Tema esmakirjeldatud vindid erinesid väga palju mujal maailmas leiduvatest vintidest. Saarte puudumisel
Raamatust Isamaa kaardi kohal autor Mihhailov Nikolai NikolajevitšMAGNETI JÕUD Juba ammu enne revolutsiooni märgati, et kompass on Kurski steppides ulakas. Selle nool ei vaata otse lõunast põhja, vaid kaldub kõrvale: erinevates kohtades eri suundades ja erineva tugevusega.Neid magnetilisi deklinatsioone märkides joonistas Moskva geofüüsik Ernest Leist
Raamatust Virtual Reality: How It Begin autor Melnikov LevVOOLU VÕIMSUS Suurem osa meie elektrijaamu on ehitatud odavale kütusele, mida varem peeti jäätmeteks: pruunsöel, turbal, kivisöel. Aga jaamu on jõgedel ikka - odava energiaallika peal.. Suurt hüdroelektrijaama pole lihtne ehitada. Vajalik
Raamatust Habitable Space Stations autor Bubnov Igor NikolajevitšKunsti tervendav jõud Teine tuntud nõukogude psühholoog L.S. Võgotski väitis, et kunstil on kompenseeriv funktsioon. See muudab selle eriti oluliseks astronaudi psühhofüüsilise seisundi stabiliseerimiseks ja korrigeerimiseks. Sel juhul kõige tõhusam
Raamatust Sõjalaevad autor Perlja Zigmund NaumovitšKUNSTILINE GRAVITSIOON Paljud kosmosemeditsiini eksperdid on pikka aega tegelenud kaaluta inimese probleemiga, kuid vaatamata eksperimentaalsete andmete olemasolule jäävad paljud kaaluta oleku mõjuga seotud küsimused inimesele lahendamata.
Raamatust New Space Technologies autor Frolov Aleksander VladimirovitšTugevus ja kiirus Suur kiirus on lahingus väga oluline eelis. Kiirem laev valib endale soodsa asukoha ja lahingukauguse. Kui tema ülem soovib, võib ta alati distantsi suurendada või vähendada; kui vastane väldib võitlust, saab ta seda teha
Raamatust Underground Thunderstorm autor Orlov Vladimir3. peatükk Magnuse efekt ja Lorentzi jõud Sarnaselt Žukovski-Chaplygini tiivaga tekib Magnuse jõud pöörleva silindri pinnal oleva keskkonna voolu rõhu erinevuse tõttu. Selle efekti avastas saksa teadlane H. G. Magnus 1852. aastal. Joonisel fig. 8 näidatud
Raamatust 100 suurepärast saavutust tehnikamaailmas autor Zigunenko Stanislav Nikolajevitš27. peatükk Krooniline liikumapanev jõud Arendades Veiniku ideed, et objekti (keha) substantsi mis tahes "intensiaali" saab kasutada kroonvälja genereerimiseks ja antud materiaalse objekti aja kiiruse muutmiseks, vaatleme lihtsat näidet.
Ankrute raamatust autor Skrjagin Lev NikolajevitšSAMOVARI MUUNDUMISE MILJARDIDE JÕUD Alustuseks paneme samovari. Kus on söed, näiteks kus? Läbi põlenud. Kombineeritud hapnikuga. Muutus lenduvaks gaasiks ja lendas torusse. Kõik teavad seda. Kes ei usuks
Raamatust Nanotehnoloogia [Teadus, innovatsioon ja võimalused] autor Foster LynnMILJARDIDE JÕUD Kui tavaline orkaan hävitab terveid külasid, siis mida saab teha plahvatus - raudne torm? Võib-olla puhub plahvatus terves linnas majad maha nagu puru teelaualt. Tegelikkuses seda ei juhtu. Muidugi juhtub, et maja plahvatuse tõttu õhku tõuseb. Aga naabermajad
Raamatust Leiutamisalgoritm autor Altshuller Heinrich SaulovitšVaateklaasi jõud Arieli kombel õhku tõusta ... See pole mitte ainult ulmekirjanike, vaid ka paljude teadlaste unistus. Nähtust, mis võimaldab materiaalsel kehal ruumis vabalt liikuda, on nad pikka aega nimetanud levitatsiooniks (kreeka keelest levitas - "tõus"). magnetiline levitatsioon. See termin
Autori raamatust Autori raamatust10.2. Idee jõud. Mis on tõesti hea idee? Iga inimtegevus, sealhulgas organisatsioonide loomine ja loovus, saab alguse ideest. Õigel ajal väljendatud suurepärasel ideel on uskumatu jõud ja loominguline võime. Äri jaoks
Autori raamatustFantaasia jõud On muutunud üldlevinud tõeks, et fantaasia mängib tohutut rolli igasuguses loomingulises tegevuses, sealhulgas teaduslikus ja tehnilises tegevuses. Kuid on hämmastav paradoks: fantaasia suurima väärtuse tunnustamisega ei kaasne süstemaatilisi jõupingutusi selle elluviimiseks.