Mis on võnkumiste tüübid. Mehaanilised vibratsioonid. Võnkuva liikumise parameetrid. Kõikumised. Perioodilised kõikumised
Võnkesüsteemis toimub perioodiline ühe energialiigi üleminek teisele, mil potentsiaalne energia (energia sõltuvalt süsteemi asendist) muundatakse kineetiliseks energiaks (liikumisenergiaks) ja vastupidi.
Võnkumisprotsessi visuaalse esituse saab koostades graafiku üksiku massi võnkumiste kohta koordinaatides t(aeg) ja y(liikumine).
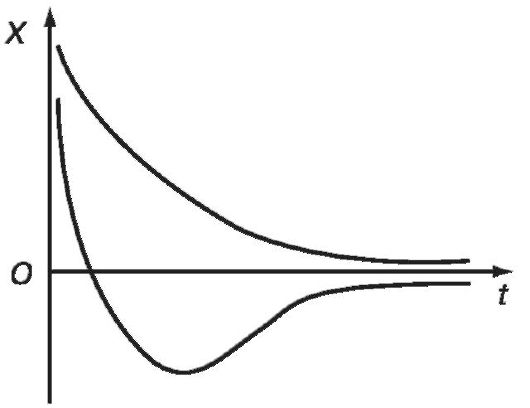
Kui võnkesüsteemi siseneb välisenergia, siis võnkumised suurenevad (joonis 16.6 a). Kui konservatiivset süsteemi ei anta välist energiat, on võnkumised summutamata (joonis 16.6 b). Kui süsteemi energia väheneb (näiteks hõõrdumise tõttu dissipatiivses süsteemis), siis võnkumised sumbuvad (joonis 16.6 c).
Võnkumisprotsessi oluline tunnus on võnkumiste kuju. Lainekuju - see on kõver, mis näitab võnkesüsteemi punktide asukohta tasakaaluasendi suhtes kindlal ajahetkel. Täheldada saab kõige lihtsamaid vibratsiooni vorme. Näiteks on selgelt näha kahe posti vahel rippuva traadi lainekujud ehk kitarrikeled.
Võnkumisi, mis tekivad väliskoormuse puudumisel, nimetatakse vabad vibratsioonid . Dissipatiivse süsteemi vabavõnkumised summutatakse, kuna selle koguenergia väheneb. Konservatiivse süsteemi energia jääb konstantseks ja selle vabad võnkumised ei summuta. Konservatiivseid süsteeme aga looduses ei eksisteeri, seega uuritakse nende võnkumisi vaid teoreetiliselt. Konservatiivsete süsteemide vaba vibratsiooni nimetatakse enda vibratsioonid .
Perioodilised kõikumised on vibratsioonid, mis vastavad tingimusele y(t)=y(t+T). Siin T on võnkeperiood, st. ühe võnkumise aeg. Perioodilistel võnkumistel on ka teisi olulisi omadusi. Näiteks, amplituud a on pool kiigest a=(y max – y min )/2 , ringsagedus on võnkumiste arv per 2 sekundit, tehniline sagedus f on vibratsioonide arv ühes sekundis. Mõlemad sagedused ja periood on omavahel seotud:
(Hz), (rad/s).
Harmoonilised vibratsioonid on võnkumised, mis muutuvad vastavalt seadusele või Siin – võnkefaas , – algfaas .
Sunnitud vibratsioonid tekivad välisjõudude mõjul.
Vibratsioon on sundvõnkumised, mis tekivad suhteliselt väikese amplituudiga ja mitte liiga madala sagedusega.
4. Dünaamiliste koormuste tüübid
Konstruktsiooni vibratsioon tekib dünaamilistest koormustest. Erinevalt staatilistest koormustest muutuvad dünaamilised koormused aja jooksul suuruse, suuna või asukoha poolest. Need teavitavad kiirendussüsteemi masse, põhjustavad inertsiaaljõude, mis võivad viia võnkumiste järsu suurenemiseni ja selle tulemusena kogu konstruktsiooni või selle osade hävimiseni.
Mõelge dünaamiliste koormuste peamistele tüüpidele.
on konstruktsioonile teatud perioodi järel rakenduv koormus. Perioodiliste koormuste allikateks on erinevad masinad ja mehhanismid: elektrimootorid, metallitöötlemismasinad, ventilaatorid, tsentrifuugid jne. Kui nende pöörlevad osad ei ole tasakaalus, siis need põhjustavad harmooniline koormus (koormuse muutumine vastavalt siinuse või koosinuse seadusele). Sellist koormust nimetatakse vibratsioonikoormus . Kolbkompressorid ja -pumbad, stantsimismasinad, purustid, vaiatõstukid jne loovad mitteharmooniline koormus .Impulsskoormused tekivad plahvatuse, langeva koormuse või elektrijaama osade (haamrid, vaiaajamid jne) tagajärjel.
Liikuvad koormad tekitavad rongid, mootortransport jne.
Nad on väga ohtlikud mittedeterministlik (juhuslik) koormused . Need on tuule-, seismi-, plahvatusohtlikud koormused.
1. Kõikumised. perioodilised kõikumised. Harmoonilised vibratsioonid.
2. Vaba vibratsioon. Sumbutamata ja summutatud võnkumised.
3. Sunnitud vibratsioon. Resonants.
4. Võnkumisprotsesside võrdlus. Summutamata harmooniliste võnkumiste energia.
5. Isevõnkumised.
6. Inimkeha võnkumised ja nende registreerimine.
7. Põhimõisted ja valemid.
8. Ülesanded.
1.1. Kõikumised. perioodilised kõikumised.
Harmoonilised vibratsioonid
kõikumised nimetatakse protsessideks, mis erinevad erineva kordusastme poolest.
korduv igas elusorganismis toimuvad pidevalt protsessid, näiteks: südame kokkutõmbed, kopsufunktsioon; me väriseme, kui meil on külm; kuuleme ja räägime tänu kuulmekilede ja häälepaelte vibratsioonile; Kõndimisel teevad meie jalad võnkuvaid liigutusi. Aatomid, mis panevad meid vibreerima. Maailm, milles me elame, on märkimisväärselt altid kõikumistele.
Korduva protsessi füüsikalise iseloomu järgi eristatakse võnkumisi: mehaanilisi, elektrilisi jne. See loeng käsitleb mehaanilised vibratsioonid.
Perioodilised kõikumised
perioodiline nimetatakse selliseid võnkumisi, kus teatud aja möödudes korduvad kõik liikumise tunnused.
Perioodiliste võnkumiste jaoks kasutatakse järgmisi omadusi:
võnkeperiood T, võrdne ajaga, mille jooksul toimub üks täielik võnkumine;
võnkesagedusν, võrdne võnkumiste arvuga sekundis (ν = 1/T);
võnke amplituud A, võrdne maksimaalse nihkega tasakaaluasendist.
Harmoonilised vibratsioonid
Perioodiliste kõikumiste hulgas on eriline koht harmooniline kõikumised. Nende tähtsus tuleneb järgmistest põhjustest. Esiteks on looduses ja tehnikas esinevatel võnkumistel sageli harmoonilisele väga lähedane iseloom, teiseks võib erineva kujuga perioodilisi protsesse (erineva ajasõltuvusega) kujutada mitme harmoonilise võnke superpositsioonina.
Harmoonilised vibratsioonid- need on võnkumised, mille puhul vaadeldav väärtus muutub ajas vastavalt siinuse või koosinuse seadusele:
Matemaatikas nimetatakse seda tüüpi funktsioone harmooniline, seetõttu nimetatakse selliste funktsioonidega kirjeldatud võnkumisi ka harmoonilisteks.
Võnkuvat liikumist sooritava keha asendit iseloomustab nihe tasakaaluasendi kohta. Sel juhul on suurustel valemis (1.1) järgmine tähendus:
X- eelarvamus keha ajahetkel t;
AGA - amplituud kõikumised, mis on võrdsed maksimaalse nihkega;
ω - ringsagedus võnkumised (võnkumiste arv 2-s π sekundit), mis on seotud võnkesageduse suhtega
φ = (ωt +φ 0) - faasis kõikumised (ajahetkel t); φ 0 - algfaas võnkumised (at = 0 juures).
 Riis. 1.1. Nihke ja aja graafikud x(0) = A ja x(0) = 0 korral
Riis. 1.1. Nihke ja aja graafikud x(0) = A ja x(0) = 0 korral
 1.2. Vaba vibratsioon. Sumbutamata ja summutatud võnkumised
1.2. Vaba vibratsioon. Sumbutamata ja summutatud võnkumised
Tasuta või oma nimetatakse selliseid võnkumisi, mis tekivad iseendale jäetud süsteemis pärast seda, kui see on tasakaalust välja viidud.
Näiteks võib tuua keermele riputatud kuuli võnkumise. Vibratsiooni tekitamiseks peate kuuli kas lükkama või kõrvale nihutades vabastama. Tõukamisel teavitatakse palli kineetiline energia ja kõrvalekallete korral - potentsiaal.
Vabavõnkumisi teostatakse tänu esialgsele energiavarule.
Vaba summutamata vibratsioon
Vabavõnkumisi saab summutada ainult hõõrdejõu puudumisel. Vastasel juhul kulub esialgne energiavaru selle ületamiseks ja võnkeulatus väheneb.
Vaatleme näiteks kaaluta vedrul rippuva keha vibratsioone, mis tekivad pärast keha allasuunamist ja seejärel vabastamist (joonis 1.2).
 Riis. 1.2. Keha vibratsioon vedrul
Riis. 1.2. Keha vibratsioon vedrul
Venitatud vedru küljelt toimib keha elastsusjõud F võrdeline nihke suurusega X:
Konstantset tegurit k nimetatakse kevadmäär ja sõltub selle suurusest ja materjalist. Märk "-" näitab, et elastsusjõud on alati suunatud nihkesuunale vastupidises suunas, st. tasakaaluasendisse.
Hõõrdumise puudumisel on elastsusjõud (1,4) ainus jõud, mis kehale mõjub. Vastavalt Newtoni teisele seadusele (ma = F):
 Pärast kõigi liikmete ülekandmist vasakule ja kehamassiga (m) jagamist saame diferentsiaalvõrrandi vabade võnkumiste jaoks hõõrdumise puudumisel:
Pärast kõigi liikmete ülekandmist vasakule ja kehamassiga (m) jagamist saame diferentsiaalvõrrandi vabade võnkumiste jaoks hõõrdumise puudumisel:
 Väärtus ω 0 (1,6) osutus võrdseks tsüklilise sagedusega. Seda sagedust nimetatakse oma.
Väärtus ω 0 (1,6) osutus võrdseks tsüklilise sagedusega. Seda sagedust nimetatakse oma.
Seega on vabad vibratsioonid hõõrdumise puudumisel harmoonilised, kui tasakaaluasendist kõrvalekaldumisel elastsusjõud(1.4).
Enda ringkiri sagedus on vabade harmooniliste võnkumiste põhiomadus. See väärtus sõltub ainult võnkesüsteemi omadustest (vaatlusalusel juhul keha massist ja vedru jäikusest). Järgnevalt kasutatakse tähistamiseks alati sümbolit ω 0 loomulik ringsagedus(st sagedus, mille juures tekiks vibratsioon hõõrdumise puudumisel).
Vabade vibratsioonide amplituud määrab võnkesüsteemi omadused (m, k) ja sellele algsel ajahetkel antud energia.
Hõõrdumise puudumisel tekivad harmoonilistele lähedased vabavõnked ka teistes süsteemides: matemaatilistes ja füüsikalistes pendlites (nende küsimuste teooriat ei käsitleta) (joon. 1.3).
Matemaatiline pendel- kaaluta niidile riputatud väike keha (materjal punkt) (joonis 1.3 a). Kui niit nihutatakse tasakaaluasendist väikese (kuni 5°) nurga α võrra ja vabastatakse, siis keha võngub valemiga määratud perioodiga.
 kus L on keerme pikkus, g on vabalangemise kiirendus.
kus L on keerme pikkus, g on vabalangemise kiirendus.
 Riis. 1.3. Matemaatiline pendel (a), füüsiline pendel (b)
Riis. 1.3. Matemaatiline pendel (a), füüsiline pendel (b)
füüsiline pendel– jäik keha, mis võngub raskusjõu toimel ümber fikseeritud horisontaaltelje. Joonis 1.3 b skemaatiliselt kujutab füüsilist pendlit suvalise kujuga keha kujul, mis on tasakaaluasendist kõrvale kaldunud nurga α võrra. Füüsikalise pendli võnkeperioodi kirjeldatakse valemiga
 kus J on keha inertsimoment telje suhtes, m on mass, h on raskuskeskme (punkt C) ja vedrustuse telje (punkt O) vaheline kaugus.
kus J on keha inertsimoment telje suhtes, m on mass, h on raskuskeskme (punkt C) ja vedrustuse telje (punkt O) vaheline kaugus.
Inertsmoment on suurus, mis sõltub keha massist, selle mõõtmetest ja asendist pöörlemistelje suhtes. Inertsmoment arvutatakse spetsiaalsete valemite abil.
Vaba summutatud vibratsioon
Reaalsetes süsteemides mõjuvad hõõrdejõud muudavad oluliselt liikumise olemust: võnkesüsteemi energia väheneb pidevalt ja võnkumised kas hääbuma või ei esine üldse.
Vastupanujõud on suunatud keha liikumisele vastupidises suunas ja mitte väga suurtel kiirustel on see võrdeline kiirusega:
 Selliste kõikumiste graafik on näidatud joonisel fig. 1.4.
Selliste kõikumiste graafik on näidatud joonisel fig. 1.4.
Sumbumisastme tunnusena kasutatakse dimensioonita suurust, nn logaritmilise summutuse vähenemineλ.
 Riis. 1.4. Summutatud võnkumiste nihe versus aeg
Riis. 1.4. Summutatud võnkumiste nihe versus aeg
Logaritmilise summutuse vähenemine on võrdne eelmise võnke amplituudi ja järgneva võnke amplituudi suhte naturaallogaritmiga.
kus i on võnke järgarv.
On lihtne näha, et logaritmilise summutuse vähenemine leitakse valemiga
Tugev sumbumine. Kell
kui tingimus β ≥ ω 0 on täidetud, naaseb süsteem võnkumata tasakaaluasendisse. Sellist liikumist nimetatakse perioodiline. Joonisel 1.5 on näidatud kaks võimalikku viisi tasakaaluasendisse naasmiseks perioodilise liikumise ajal.
 Riis. 1.5. perioodiline liikumine
Riis. 1.5. perioodiline liikumine
1.3. Sundvibratsioonid, resonants
Hõõrdejõudude juuresolekul tekkivad vabad vibratsioonid summutatakse. Perioodilise välistegevuse abil saab tekitada pidevaid võnkumisi.
sunnitud nimetatakse selliseid võnkumisi, mille käigus võnkuv süsteem puutub kokku välise perioodilise jõuga (seda nimetatakse edasiviivaks jõuks).
Laske liikumapanev jõud muutuda harmoonilise seaduse järgi
 Sundvõnkumiste graafik on näidatud joonisel fig. 1.6.
Sundvõnkumiste graafik on näidatud joonisel fig. 1.6.
 Riis. 1.6. Sundvibratsiooni nihke ja aja graafik
Riis. 1.6. Sundvibratsiooni nihke ja aja graafik
On näha, et sundvõnkumiste amplituud saavutab järk-järgult püsiva väärtuse. Püsivad sundvõnked on harmoonilised ja nende sagedus on võrdne liikumapaneva jõu sagedusega:
Püsivate sundvõnkumiste amplituud (A) leitakse valemiga:
 Resonants nimetatakse sundvõnkumiste maksimaalse amplituudi saavutamist liikuva jõu sageduse teatud väärtusel.
Resonants nimetatakse sundvõnkumiste maksimaalse amplituudi saavutamist liikuva jõu sageduse teatud väärtusel.
Kui tingimus (1.18) ei ole täidetud, siis resonantsi ei teki. Sel juhul, liikuva jõu sageduse kasvades, sundvõnkumiste amplituud väheneb monotoonselt, kaldudes nulli.
Sundvõnkumiste amplituudi A graafiline sõltuvus liikuva jõu ringsagedusest summutusteguri erinevate väärtuste korral (β 1 > β 2 > β 3) on näidatud joonisel fig. 1.7. Sellist graafikute kogumit nimetatakse resonantskõverateks.
Mõnel juhul on resonantsi võnkumiste amplituudi tugev tõus süsteemi tugevusele ohtlik. On juhtumeid, kui resonants viis struktuuride hävimiseni.
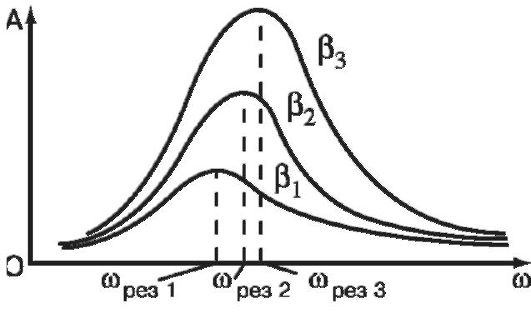 Riis. 1.7. Resonantskõverad
Riis. 1.7. Resonantskõverad
1.4. Võnkumisprotsesside võrdlus. Summutamata harmooniliste võnkumiste energia
Tabelis 1.1 on toodud vaadeldavate võnkeprotsesside omadused.
Tabel 1.1. Vaba- ja sundvibratsiooni tunnused
 Summutamata harmooniliste võnkumiste energia
Summutamata harmooniliste võnkumiste energia
Harmooniliste võnkumist teostaval kehal on kahte tüüpi energiat: liikumise kineetiline energia E k \u003d mv 2 / 2 ja potentsiaalne energia E p, mis on seotud elastse jõu toimega. Teatavasti määratakse elastsusjõu (1.4) toimel keha potentsiaalne energia valemiga E p = kx 2 /2. Sumbutamata võnkumiste jaoks X= A cos(ωt) ja keha kiirus määratakse valemiga v= - A ωsin(ωt). Sellest saadakse summutamata võnkumist sooritava keha energiate avaldised:
 Süsteemi koguenergia, milles tekivad summutamata harmoonilised võnkumised, on nende energiate summa ja jääb muutumatuks:
Süsteemi koguenergia, milles tekivad summutamata harmoonilised võnkumised, on nende energiate summa ja jääb muutumatuks:
Siin m on keha mass, ω ja A on võnkumiste ringsagedus ja amplituud, k on elastsustegur.
1.5. Isevõnkumised
On süsteeme, mis ise reguleerivad kaotsiläinud energia perioodilist täiendamist ja võivad seetõttu pikka aega kõikuda.
Isevõnkumised- summutamata võnkumised, mida toetab väline energiaallikas, mille varustamist reguleerib võnkesüsteem ise.
Süsteeme, milles sellised võnkumised esinevad, nimetatakse isevõnkuv. Isevõnkumiste amplituud ja sagedus sõltuvad isevõnkuva süsteemi enda omadustest. Isevõnkuvat süsteemi saab esitada järgmise skeemi abil:
 Sel juhul mõjutab võnkesüsteem ise tagasisidekanali kaudu energiaregulaatorit, teavitades seda süsteemi olekust.
Sel juhul mõjutab võnkesüsteem ise tagasisidekanali kaudu energiaregulaatorit, teavitades seda süsteemi olekust.
Tagasiside nimetatakse mis tahes protsessi tulemuste mõjuks selle kulgemisele.
Kui selline mõju toob kaasa protsessi intensiivsuse suurenemise, siis kutsutakse tagasisidet positiivne. Kui mõju viib protsessi intensiivsuse vähenemiseni, siis kutsutakse tagasisidet negatiivne.
Isevõnkuvas süsteemis võib esineda nii positiivset kui negatiivset tagasisidet.
Isevõnkuva süsteemi näiteks on kell, mille puhul pendel saab lööke ülestõstetud raskuse või väänatud vedru energia tõttu ja need löögid tekivad neil hetkedel, mil pendel läbib keskasendi.
Bioloogiliste isevõnkuvate süsteemide näideteks on sellised organid nagu süda ja kopsud.
1.6. Inimkeha võnkumised ja nende registreerimine
Inimkeha või selle üksikute osade tekitatud võnkumiste analüüsi kasutatakse laialdaselt meditsiinipraktikas.
Inimkeha võnkuvad liigutused kõndimisel
Kõndimine on keeruline perioodiline liikumisprotsess, mis tuleneb kehatüve ja jäsemete skeletilihaste koordineeritud tegevusest. Kõndimisprotsessi analüüs pakub palju diagnostilisi tunnuseid.
Kõndimise iseloomulikuks tunnuseks on tugiasendi perioodilisus ühe jalaga (ühekordne tugiperiood) või kahe jalaga (topelttugiperiood). Tavaliselt on nende perioodide suhe 4:1. Kõndimisel toimub massikeskme (CM) perioodiline nihkumine piki vertikaaltelge (tavaliselt 5 cm) ja kõrvalekalle küljele (tavaliselt 2,5 cm). Sel juhul liigub CM piki kõverat, mida saab ligikaudu esitada harmoonilise funktsiooniga (joonis 1.8).
 Riis. 1.8. Inimkeha CM vertikaalne nihe kõndimise ajal
Riis. 1.8. Inimkeha CM vertikaalne nihe kõndimise ajal
Komplekssed võnkuvad liigutused, säilitades samal ajal keha vertikaalse asendi.
Vertikaalselt seisev inimene kogeb tugitasandil jalgade ühise massikeskme (MCM) ja survekeskme (CP) keerulisi võnkumisi. Nende kõikumiste analüüsi põhjal statokinemeetria– meetod, mille abil hinnata inimese võimet hoida püstiasendit. Hoides GCM projektsiooni toetusala piiri koordinaatides. Seda meetodit rakendatakse stabilomeetrilise analüsaatori abil, mille põhiosa moodustab stabiloplatvorm, millel uuritav on vertikaalses asendis. Objekti CP poolt vertikaalset poosi säilitades tekitatud võnked edastatakse stabiloplatvormile ja registreeritakse spetsiaalsete tensomõõturite abil. Tensomõõturi signaalid edastatakse salvestusseadmesse. Samal ajal salvestatakse statokinesigramm - katsealuse liikumise trajektoor horisontaaltasandil kahemõõtmelises koordinaatsüsteemis. Harmoonilise spektri järgi statokinesigrammid vertikaalsuse tunnuseid on võimalik hinnata normis ja sellest kõrvalekalletega. See meetod võimaldab analüüsida inimese statokineetilise stabiilsuse (SCR) näitajaid.
Südame mehaanilised vibratsioonid
Südame uurimiseks on erinevaid meetodeid, mis põhinevad mehaanilistel perioodilistel protsessidel.
Ballistokardiograafia(BCG) - meetod südametegevuse mehaaniliste ilmingute uurimiseks, mis põhineb keha pulsi mikroliigutuste registreerimisel, mis on põhjustatud vere väljutamisest südame vatsakestest suurtesse anumatesse. See põhjustab nähtuse naaseb. Inimkeha asetatakse spetsiaalsele teisaldatavale platvormile, mis asub massiivsel fikseeritud laual. Platvorm satub tagasilöögi tagajärjel keerukasse võnkuvasse liikumisse. Platvormi nihke sõltuvust kehast ajast nimetatakse ballistokardiogrammiks (joonis 1.9), mille analüüs võimaldab hinnata vere liikumist ja südametegevuse seisundit.
Apekskardiograafia(AKG) - meetod rindkere madalsageduslike võnkumiste graafiliseks registreerimiseks tipulöögi piirkonnas, mis on põhjustatud südame tööst. Apekskardiogrammi registreerimine toimub reeglina mitmekanalilisel elektrokardiogrammil.
 Riis. 1.9. Balistokardiogrammi salvestamine
Riis. 1.9. Balistokardiogrammi salvestamine
graafiku abil piesokristallilise anduri abil, mis muundab mehaanilised vibratsioonid elektrilisteks. Enne rindkere esiseinale salvestamist määratakse palpatsiooniga maksimaalse pulsatsiooni punkt (tipulöögi punkt), millesse andur on fikseeritud. Anduri signaalide põhjal koostatakse automaatselt apekskardiogramm. Tehakse ACG amplituudianalüüs - kõvera amplituude võrreldakse südame töö erinevates faasides maksimaalse kõrvalekaldega nulljoonest - EO segmendist, mis võetakse 100%. Joonis 1.10 näitab apekskardiogrammi.
 Riis. 1.10. Apekskardiogrammi registreerimine
Riis. 1.10. Apekskardiogrammi registreerimine
Kinetokardiograafia(KKG) - meetod rindkere seina madala sagedusega vibratsiooni registreerimiseks, mis on põhjustatud südametegevusest. Kinetokardiogramm erineb apekskardiogrammist: esimene registreerib rindkere seina absoluutsed liikumised ruumis, teine roietevaheliste ruumide kõikumised roiete suhtes. See meetod määrab rindkere võnkumiste nihke (KKG x), liikumiskiiruse (KKG v) ja kiirenduse (KKG a). Joonis 1.11 näitab erinevate kinetokardiogrammide võrdlust.
 Riis. 1.11. Kinetokardiogrammide salvestamine nihke (x), kiiruse (v), kiirenduse (a) kohta
Riis. 1.11. Kinetokardiogrammide salvestamine nihke (x), kiiruse (v), kiirenduse (a) kohta
Dünamokardiograafia(DKG) - meetod rindkere raskuskeskme liikumise hindamiseks. Dünamokardiograaf võimaldab registreerida inimese rinnast mõjuvaid jõude. Dünamokardiogrammi salvestamiseks asetatakse patsient lauale, lamades selili. Rindkere all on tajuseade, mis koosneb kahest jäigast metallplaadist mõõtmetega 30x30 cm, mille vahel on elastsed elemendid, millele on paigaldatud pingeandurid. Perioodiliselt muutuv suurus ja rakenduskoht, vastuvõtvale seadmele mõjuv koormus koosneb kolmest komponendist: 1) konstantne komponent - rindkere mass; 2) muutuv - hingamisliigutuste mehaaniline mõju; 3) muutuv - südame kontraktsiooniga kaasnevad mehaanilised protsessid.
Dünamokardiogrammi salvestamine toimub subjekti hinge kinni hoides kahes suunas: vastuvõtva seadme piki- ja põiktelje suhtes. Erinevate dünamokardiogrammide võrdlus on näidatud joonisel fig. 1.12.
Seismokardiograafia põhineb inimese keha mehaaniliste vibratsioonide registreerimisel, mis on põhjustatud südame tööst. Selle meetodi puhul registreeritakse xiphoid protsessi aluse piirkonda paigaldatud andurite abil südame impulss, mis on tingitud südame mehaanilisest aktiivsusest kontraktsiooniperioodil. Samal ajal toimuvad protsessid, mis on seotud veresoonte voodi koe mehhanoretseptorite aktiivsusega, mis aktiveeruvad tsirkuleeriva vere mahu vähenemisel. Seismokardiosignaal moodustab rinnaku võnkumiste kuju.
 Riis. 1.12. Normaalsete pikisuunaliste (a) ja põiksuunaliste (b) dünamokardiogrammide registreerimine
Riis. 1.12. Normaalsete pikisuunaliste (a) ja põiksuunaliste (b) dünamokardiogrammide registreerimine
Vibratsioon
Erinevate masinate ja mehhanismide laialdane kasutuselevõtt inimelus suurendab tööviljakust. Paljude mehhanismide töö on aga seotud inimesele edasi kanduvate ja talle kahjulikku mõju avaldavate vibratsioonide tekkimisega.
Vibratsioon- keha sundvõnkumised, mille puhul võngub kas kogu keha tervikuna või selle eraldi osad erineva amplituudi ja sagedusega.
Inimene kogeb pidevalt erinevaid vibratsiooniefekte transpordis, tööl, kodus. Vibratsioon, mis on tekkinud ükskõik millises kehakohas (näiteks tungraua käes hoidva töötaja käes), levib elastsete lainetena kogu kehas. Need lained põhjustavad keha kudedes erinevat tüüpi muutuvaid deformatsioone (surumine, pinge, nihke, painutamine). Vibratsioonide mõju inimesele on tingitud paljudest vibratsiooni iseloomustavatest teguritest: sagedus (sagedusspekter, põhisagedus), amplituud, võnkepunkti kiirus ja kiirendus, võnkeprotsesside energia.
Pikaajaline kokkupuude vibratsiooniga põhjustab organismi normaalsete füsioloogiliste funktsioonide püsivaid häireid. Võib tekkida "vibratsioonihaigus". See haigus põhjustab inimkehas mitmeid tõsiseid häireid.
Vibratsiooni mõju kehale sõltub vibratsiooni intensiivsusest, sagedusest, kestusest, nende rakendamise kohast ja suunast keha suhtes, kehaasendist, aga ka inimese seisundist ja tema individuaalsetest omadustest.
Kõikumised sagedusega 3-5 Hz põhjustavad vestibulaarse aparatuuri reaktsioone, vaskulaarseid häireid. Sagedustel 3-15 Hz täheldatakse üksikute elundite (maks, magu, pea) ja kogu keha resonantsvibratsiooniga seotud häireid. Sagedustega 11–45 Hz kõikumine põhjustab nägemise hägustumist, iiveldust ja oksendamist. Sagedustel üle 45 Hz tekivad ajuveresoonte kahjustused, vereringe häired jne. Joonisel 1.13 on toodud inimesele ja tema organsüsteemidele kahjulikku mõju avaldavad vibratsiooni sagedusvahemikud.
 Riis. 1.13. Vibratsiooni inimesele kahjuliku mõju sagedusvahemikud
Riis. 1.13. Vibratsiooni inimesele kahjuliku mõju sagedusvahemikud
Samal ajal kasutatakse meditsiinis teatud juhtudel vibratsiooni. Näiteks valmistab hambaarst spetsiaalse vibraatori abil amalgaami. Kõrgsageduslike vibratsiooniseadmete kasutamine võimaldab puurida hambasse keeruka kujuga augu.
Vibratsiooni kasutatakse ka massaažis. Manuaalse massaaži korral viiakse masseeritavad koed massaažiterapeudi käte abil võnkuvasse liikumisse. Riistvaralise massaaži puhul kasutatakse vibraatoreid, mille puhul kasutatakse erineva kujuga otsikuid võnkuvate liigutuste edastamiseks kehale. Vibratsiooniseadmed jagunevad üldvibratsiooni seadmeteks, mis põhjustavad kogu keha värisemist (vibreeriv "tool", "voodi", "platvorm" jne) ja seadmeteks, mis võimaldavad lokaalset vibratsiooni mõju üksikutele kehaosadele.
Mehhanoteraapia
Füsioteraapia harjutustes (LFK) kasutatakse simulaatoreid, millel tehakse inimkeha erinevate osade võnkuvaid liigutusi. Neid kasutatakse sisse mehhanoteraapia - harjutusravi vorm, mille üheks ülesandeks on doseeritud rütmiliselt korduvate füüsiliste harjutuste läbiviimine liigeste treenimise või liikuvuse taastamise eesmärgil pendel-tüüpi seadmetel. Nende seadmete aluseks on tasakaalustamine (alates fr. tasakaalustaja- kiik, tasakaal) pendel, mis on kahe käega kang, mis teeb võnkuvaid (kiikuvaid) liigutusi ümber fikseeritud telje.
1.7. Põhimõisted ja valemid
 Tabeli jätk
Tabeli jätk
 Tabeli jätk
Tabeli jätk
 Tabeli lõpp
Tabeli lõpp
 1.8. Ülesanded
1.8. Ülesanded
1. Tooge näiteid inimeste võnkesüsteemide kohta.
2. Täiskasvanul teeb süda 70 kontraktsiooni minutis. Määrake: a) kontraktsioonide sagedus; b) kärbete arv 50 aasta jooksul
Vastus: a) 1,17 Hz; b) 1,84 x 10 9 .
3. Kui pikk peab olema matemaatiline pendel, et selle võnkeperiood oleks võrdne 1 sekundiga?
 4.
Õhuke sirge 1 m pikkune homogeenne varras riputatakse selle otsast teljel. Määrake: a) milline on selle võnkeperiood (väike)? b) kui pikk on sama võnkeperioodiga matemaatiline pendel?
4.
Õhuke sirge 1 m pikkune homogeenne varras riputatakse selle otsast teljel. Määrake: a) milline on selle võnkeperiood (väike)? b) kui pikk on sama võnkeperioodiga matemaatiline pendel?
 5.
Keha massiga 1 kg võngub vastavalt seadusele x = 0,42 cos (7,40t), kus t mõõdetakse sekundites ja x mõõdetakse meetrites. Leia: a) amplituud; b) sagedus; c) koguenergia; d) kineetilised ja potentsiaalsed energiad x = 0,16 m juures.
5.
Keha massiga 1 kg võngub vastavalt seadusele x = 0,42 cos (7,40t), kus t mõõdetakse sekundites ja x mõõdetakse meetrites. Leia: a) amplituud; b) sagedus; c) koguenergia; d) kineetilised ja potentsiaalsed energiad x = 0,16 m juures.
 6.
Hinnake kiirust, millega inimene sammu pikkusega kõnnib l= 0,65 m. Jala pikkus L = 0,8 m; raskuskese asub jalast H = 0,5 m kaugusel. Jala inertsmomendi määramiseks puusaliigese suhtes kasutage valemit I = 0,2 ml 2 .
6.
Hinnake kiirust, millega inimene sammu pikkusega kõnnib l= 0,65 m. Jala pikkus L = 0,8 m; raskuskese asub jalast H = 0,5 m kaugusel. Jala inertsmomendi määramiseks puusaliigese suhtes kasutage valemit I = 0,2 ml 2 .
 7.
Kuidas saate määrata kosmosejaama pardal oleva väikese keha massi, kui teie käsutuses on kell, vedru ja raskuste komplekt?
7.
Kuidas saate määrata kosmosejaama pardal oleva väikese keha massi, kui teie käsutuses on kell, vedru ja raskuste komplekt?
 8.
Summutatud võnkumiste amplituud väheneb 10 võnke korral 1/10 oma esialgsest väärtusest. Võnkeperiood T = 0,4 s. Määrake logaritmiline dekrement ja summutustegur.
8.
Summutatud võnkumiste amplituud väheneb 10 võnke korral 1/10 oma esialgsest väärtusest. Võnkeperiood T = 0,4 s. Määrake logaritmiline dekrement ja summutustegur.
Sissejuhatus………………………………………………………………….
- Vibratsiooni liigid ja omadused.
- Mehaanilised vibratsioonid ……………………………………………….
- Elektromagnetilised võnked ……………………………
Kirjandus……………………………………………………………………….
Sissejuhatus.
Vibratsioon on looduses ja tehnikas üks levinumaid protsesse. Kõrghooned ja kõrgepingejuhtmed võnguvad tuule mõjul, haavakella ja auto pendel vedrudel liikumisel, jõe tase aasta jooksul ja inimkeha temperatuur haigestumisel.
Heli on õhu tiheduse ja rõhu kõikumine, raadiolained on perioodilised elektri- ja magnetvälja tugevuse muutused, nähtav valgus on samuti elektromagnetilised võnked, ainult veidi erineva lainepikkuse ja sagedusega. Maavärinad - pinnase vibratsioonid, looded - merede ja ookeanide taseme muutused, mis on põhjustatud Kuu ligitõmbamisest ja ulatuvad mõnel pool 18 meetrini, pulsilöögid - inimese südamelihase perioodilised kokkutõmbed jne. Muutus ärkvelolekus ja unes, tööl ja puhkusel, talvel ja suvel...
Isegi meie igapäevane tööle minemine ja koju naasmine kuuluvad kõikumiste definitsiooni alla, mida tõlgendatakse protsessidena, mis korduvad täpselt või ligikaudu korrapäraste ajavahemike järel.
Vibratsioonid on mehaanilised, elektromagnetilised, keemilised, termodünaamilised ja mitmesugused muud. Vaatamata sellele mitmekesisusele on neil kõigil palju ühist ja seetõttu kirjeldatakse neid samade diferentsiaalvõrranditega. Füüsika eriharu – võnketeooria – tegeleb nende nähtuste seaduspärasuste uurimisega. Neid peavad teadma laeva- ja lennukiehitajad, tööstuse ja transpordi spetsialistid, raadiotehnika ja akustikaseadmete loojad.
Kõiki kõikumisi iseloomustab amplituud - teatud väärtuse suurim kõrvalekalle selle nullväärtusest, periood ( T) või sagedus ( v). Kaks viimast suurust on omavahel seotud pöördvõrdelise suhtega: T= 1/v. Võnkesagedust väljendatakse hertsides (Hz). Mõõtühik on oma nime saanud kuulsa saksa füüsiku Heinrich Hertzi (1857-1894) järgi. 1 Hz on üks võnkumine sekundis. See on inimese südame löögisagedus. Sõna "herts" tähendab saksa keeles "süda". Soovi korral võib seda kokkulangevust vaadelda omamoodi sümboolse seosena.
Esimesed teadlased, kes võnkumisi uurisid, olid Galileo Galilei (1564...1642) ja Christian Huygens (1629...1692). Galileo kehtestas väikeste võnkumiste isokronismi (perioodi sõltumatuse amplituudist), jälgides katedraalis lühtri õõtsumist ja mõõtes aega oma käel pulsi löökide järgi. Huygens leiutas esimese pendelkella (1657) ja oma monograafia "Pendli kell" (1673) teises väljaandes uuris mitmeid pendli liikumisega seotud probleeme, eelkõige leidis füüsilise pendli löögikeskme.
Suure panuse võnkumiste uurimisse andsid paljud teadlased: inglise keel - W. Thomson (lord Kelvin) jaJ. Rayleigh , venelased - A.S. Popov ja P.N. Lebedev, Nõukogude – A.N. Krylov, L.I. Mandelstam, N.D. Papaleksi, N.N. Bogoljubov, A.A. Andronov ja teised.
1. Võnkumiste liigid ja nende omadused.
võnkuv protsesse (võnkumisi) nimetatakse liikumisteks või olekumuutusteks, millel on ajas üks või teine kordusaste.
Võnkumist nimetatakse perioodilisteks, kui võnkeprotsessis muutuvate füüsikaliste suuruste väärtusi korratakse korrapäraste ajavahemike järel T, mida nimetatakse perioodiks.
Sõltuvalt võnkumiste füüsikalisest olemusest ja ergutamise mehhanismist eristatakse:
- mehaanilised vibratsioonid (pendlite, nööride, talade, masinate ja mehhanismide osade võnkumine, laevade veeremine, merelained, rõhukõikumised heli levimisel gaasis, vedelikus, tahkes aines jne);
- elektromagnetilised võnked (vahelduvvool, voolu kõikumised, laeng, vektorid E ja H võnkeahelates jne);
- elektromehaanilised vibratsioonid(telefonimembraanide võnkumised, elektrodünaamiliste kõlarite difuusorid jne).
Võnkuvad liigutused erinevad teist tüüpi liigutustest. Neid iseloomustavad mõned ühised tunnused. Võnkumisteooria keeles kaovad erinevused keha võnkeliikumise ja võnkuvates elektromagnetahelates toimuvate protsesside vahel, kui läheneda neile üldiste printsiipide seisukohalt. Seda lähenemist nimetatakse elektromehaaniliseks analoogiaks.
Süsteemi, mis võngub, nimetatakse võnkesüsteemiks.
Võnkumisi, mis tekivad süsteemi mis tahes esialgsest kõrvalekaldest selle stabiilsest tasakaalust, nimetatakse loomulikeks võnkumisteks.
Võnkumisi, mis tekivad süsteemis muutuva välismõju mõjul, nimetatakse sundvõnkudeks.
Erinevatele võnkesüsteemidele ühised üldised tunnused ja kontseptsioonid on järgmised:
- diferentsiaalvõrrand (selle vorm on kõigi võnkesüsteemide puhul sama);
- võnkevõrrand;
- amplituud;
- võnkesagedus või periood;
- faas;
- algfaas.
Vaatleme mehaaniliste ja elektromagnetiliste süsteemide kõikumisi, tuues välja täpselt ülaltoodud omadused.
1.1 Mehaaniline vibratsioon.
Olenevalt võnkesüsteemile avalduva löögi iseloomust eristatakse vabavõnkumisi, sundvõnkumisi, isevõnkumisi ja parameetrilisi võnkumisi.
Vabad vibratsioonid on need, mis tekivad süsteemis, mis on jäetud endale pärast seda, kui sellele on antud tõuge või see on tasakaalust välja viidud. Näiteks võib tuua keermele riputatud kuuli võnkumise (pendli). Vibratsiooni tekitamiseks võite kuuli lükata või kõrvale võtta ja vabastada.
Sundvõnkumisteks nimetatakse selliseid võnkumisi, mille käigus võnkuv süsteem puutub kokku välise perioodiliselt muutuva jõuga. Näiteks võib tuua silla vibratsiooni, mis tekib siis, kui sammul kõndivad inimesed sellest üle lähevad.
Isevõnkumistega, aga ka sundvõnkumisega kaasneb välisjõudude mõju võnkesüsteemile, kuid nende mõjude toimumise ajahetked määrab võnkesüsteem ise – välismõju kontrollib süsteem ise. . Isevõnkuva süsteemi näiteks on kell, mille puhul pendel saab lööke ülestõstetud raskuse või väänatud vedru energia mõjul ja need löögid tekivad pendli keskasendit läbivatel hetkedel. Parameetriliste võnkumiste korral toimub välismõjul perioodiline muutus mõnes süsteemi parameetris, näiteks keerme pikkuses, mille külge kuul riputatakse, tekitades võnkumisi.
Lihtsamad on harmoonilised võnkumised, s.o. sellised võnked, mille puhul võnkeväärtus (näiteks pendli hälve) muutub ajas vastavalt siinuse või koosinuse seadusele. Seda tüüpi võnkumine on eriti oluline järgmistel põhjustel: esiteks on looduses ja tehnikas esinevad võnkumised sageli harmoonilisele väga lähedase iseloomuga ja teiseks saab erineva kujuga perioodilisi protsesse (erineva ajasõltuvusega) kujutada ülekattena. mitu harmoonilist vibratsiooni.
Mehaanilise võnkesüsteemina, mille näitel vaatleme võnkumisi, valime vedru pendel: väike keha (materjali punkt) massiga m on riputatud vedrule, mille jäikus on k (joonis 2).
Koormamata vedru pikkus oli l 0 . Kere rippumisel pikenes vedru ∆l võrra. Tekkinud elastsusjõud tasakaalustas gravitatsioonijõu. See suhe võimaldab meil kindlaks teha vedrupendli tasakaaluasend. Kui nüüd keha nihkuda tasakaaluasendi suhtes kauguse x võrra, siis mõjuvad kehale elastsusjõud ja raskusjõud.
Nende jõudude resultant on:
Miinusmärk tähendab, et jõu suund F ex. ja nihke suund x on vastupidised. F nt. - elastsusjõud, mis tekib keha nihkumisel tasakaaluasendi suhtes vedru kokkusurumise või pinge tõttu (olenevalt sellest, kummale poole keha tasakaaluasendist kõrvale kaldub). Kvalitatiivselt on joonisel 1.1 kujutatud elastsusjõu mõju tulemus (mida suurem nihe, seda suurem F kontroll).
Joonis 1.1 – Vedrupendli asend ühel võnkeperioodil.
Kui süsteem võngub võnkesüsteemis endas arenevate jõudude toimel ilma välismõjudeta ja takistusjõude arvestamata, siis võnkumisi nn. summutamata loomulikud võnkumised.
Võnkumise summutuse puudumine on iseloomulik ideaalsele võnkesüsteemile, mis on füüsiline mudel reaalsed füüsikalised protsessid.
Diferentsiaalvõrrand, mis vastab vedrupendli võnkumisele, saab selle liikumise seadusest, mis on Newtoni 2. seadus ma = F.
Arvestades, et kiirendus on nihke teine tuletis aja suhtes
,
ja kehale mõjuv jõud on elastsusjõud, mis on määratud keha väikeste nihkumiste korral tasakaaluasendist vastavalt Hooke'i seadusele, nagu saame
või
.
See on teist järku diferentsiaalvõrrand summutamata võnkumiste jaoks. Selle peamiseks eristavaks tunnuseks on asjaolu, et nihke teine tuletis aja (st kiirenduse) suhtes on võrdeline nihkega. Nimetatakse diferentsiaalvõrrand, milles x väärtus sisaldub nullis või esimeses astmes lineaarne diferentsiaalvõrrand. Järgnevalt näitame, et seda tüüpi võrrandid on iseloomulikud summutamata võnkudele igas ideaalses võnkesüsteemis.
Viime kõik võrrandi liikmed vasakule poole ja viime diferentsiaalvõrrandi kujule:
Väärtus, tähista seda, me saame
Seda tüüpi diferentsiaalvõrrandi lahendused on võrrandid:
Või
Neid lahendusi nimetatakse võnkevõrrandid, need võimaldavad arvutada vedrupendli nihke x igal ajahetkel.
Nimetatakse võnkumisi, milles neid iseloomustavad füüsikalised suurused muutuvad vastavalt siinuse või koosinuse seadusele harmooniline.
Siinus- ja koosinusfunktsiooni argumentide erinevus on s.o. .
Järgnevalt kasutame kõige sagedamini diferentsiaalvõrrandi lahendit kujul
Võnkuvõrrandis:
AGA - nihke amplituud on pendli maksimaalne kõrvalekalle tasakaaluasendist;
X - eelarvamus pendel, st. võnkepunkti (keha) kõrvalekalle tasakaaluasendist ajahetkel t;
– võnkefaas- väärtus, mis määrab võnkepunkti asukoha igal ajahetkel t;
α – algfaas määrab pendli asukoha algajal (t = 0).
Periood T on lühim ajavahemik, mille jooksul süsteem naaseb algasendisse. Võnkeperioodil sooritab süsteem ühe täieliku võnkumise.
Sagedus perioodilisi võnkumisi nimetatakse väärtuseks, mis võrdub võnkumiste arvuga ajaühikus.
Tsükliline või ringsagedus perioodilisi võnkumisi nimetatakse väärtuseks, mis võrdub ajaühikus sooritatud võnkumiste arvuga.
Vedrupendli puhul on loomulike võnkumiste sagedus ja periood sõltuvalt süsteemi parameetritest järgmine:
, .
Teades vedrupendli nihkevõrrandit, saame sarnased võrrandid ka teistele füüsikalistele suurustele. Leiame kiiruse, kiirenduse, vibratsioonienergia, kui vedrupendli nihkevõrrand on antud kujul.
Kiirus pendli võnkumised on nihke esmakordne tuletis:
Lühike kirjeldus
Vibratsioon on looduses ja tehnikas üks levinumaid protsesse. Kõrghooned ja kõrgepingejuhtmed võnguvad tuule mõjul, haavakella ja auto pendel vedrudel liikumisel, jõe tase aasta jooksul ja inimkeha temperatuur haigestumisel.
Mehaanilised vibratsioonid ……………………………………………….
Elektromagnetilised võnked ……………………………
Kirjandus……………………………………………………………………..
kõikumised- Need on liigutused või protsessid, mis korduvad täpselt või ligikaudu teatud ajavahemike järel.
Mehaanilised võnked - mehaaniliste suuruste kõikumised (nihe, kiirus, kiirendus, rõhk jne).
Mehaanilised vibratsioonid (olenevalt jõudude olemusest) on järgmised:
tasuta;
sunnitud;
isevõnkumised.
Tasuta nimetatakse vibratsioonideks, mis tekivad välisjõu ühekordsel toimel (energia algsõnum) ja välismõjude puudumisel võnkesüsteemile.
Tasuta (või oma)- need on võnked süsteemis sisejõudude mõjul pärast süsteemi tasakaalust välja viimist (reaalsetes tingimustes on vabad võnked alati summutatud).
Tingimused vabavõnkumiste tekkeks
1. Võnkesüsteemil peab olema stabiilne tasakaaluasend.
2. Kui süsteem viiakse tasakaalust välja, peab tekkima resultantjõud, mis viib süsteemi tagasi algasendisse
3. Hõõrdejõud (takistus) on väga väikesed.
Sunnitud vibratsioonid- kõikumised, mis tekivad ajas muutuvate välisjõudude mõjul.
Isevõnkumised- summutamata võnkumised süsteemis, mida toetavad sisemised energiaallikad välise muutuva jõu puudumisel.
Isevõnkumiste sagedus ja amplituud on määratud võnkesüsteemi enda omadustega.
Isevõnkumised erinevad vabast võnkumisest amplituudi sõltumatuse ajast ja võnkeprotsessi ergastavast algtegevusest.
Isevõnkuv süsteem koosneb: võnkesüsteemist; energiaallikas; tagasisideseade, mis reguleerib energia voolu sisemisest energiaallikast võnkesüsteemi.
Perioodil allikast tulev energia on võrdne võnkesüsteemi poolt samal ajal kaotatud energiaga.
Mehaanilised vibratsioonid jagunevad:
hääbuv;
summutamata.
summutatud vibratsioonid- fluktuatsioonid, mille energia aja jooksul väheneb.
Võnkuva liikumise omadused:
püsiv:
amplituud (A)
periood (T)
sagedus ()
Võnkuva keha suurim (absoluutväärtuses) kõrvalekalle tasakaaluasendist on nn. vibratsiooni amplituud. Tavaliselt tähistatakse amplituudi tähega A.
Nimetatakse ajavahemikku, mille jooksul keha lõpetab ühe täieliku võnkumise võnkeperiood.
Võnkeperioodi tähistatakse tavaliselt tähega T ja SI-s mõõdetakse sekundites (s).
Võnkumiste arvu ajaühikus nimetatakse võnkesagedus.
Sagedus on tähistatud tähega v (“nu”). Sageduse ühik on üks võnkumine sekundis. Seda ühikut nimetatakse hertsiks (Hz) saksa teadlase Heinrich Hertzi auks.
võnkeperiood T ja võnkesagedus v on seotud järgmise seosega:
T = 1/ või = 1/T.
Tsükliline (ringikujuline) sagedus ω on võnkumiste arv 2π sekundis
Harmoonilised vibratsioonid- mehaanilised vibratsioonid, mis tekivad nihkega võrdelise ja sellele vastupidise jõu mõjul. Harmoonilised võnked tekivad siinuse või koosinuse seaduse järgi.
Laske materiaalsel punktil teostada harmoonilisi võnkumisi.
Harmooniliste võnkumiste võrrandil on vorm:

a - kiirendus V - kiirus q - laeng A - amplituud t - aeg
(või loomulikud vibratsioonid) on võnkesüsteemi vibratsioonid, mis tulenevad ainult algselt teatatud energiast (potentsiaalsest või kineetilisest) välismõjude puudumisel.
Potentsiaalset või kineetilist energiat saab edastada näiteks mehaanilistes süsteemides algnihke või algkiiruse kaudu.
Vabalt võnkuvad kehad suhtlevad alati teiste kehadega ja moodustavad koos nendega kehade süsteemi nn võnkesüsteem.
Näiteks vedru, kuul ja vertikaalpost, mille külge on kinnitatud vedru ülemine ots (vt joonist allpool), kuuluvad võnkesüsteemi. Siin libiseb pall vabalt mööda nööri (hõõrdejõud on tühine). Kui võtate palli paremale ja jätate selle endale, võngub see vabalt ümber tasakaaluasendi (punkt O) tasakaaluasendi poole suunatud vedru elastsusjõu toimel.
Teine klassikaline näide mehaanilisest võnkesüsteemist on matemaatiline pendel (vt joonist allpool). Sel juhul sooritab pall vabavõnkumisi kahe jõu toimel: gravitatsioon ja niidi elastsusjõud (võnkesüsteemi siseneb ka Maa). Nende resultant suunatakse tasakaaluasendisse.

Võnkusüsteemi kehade vahel mõjuvaid jõude nimetatakse sisemised jõud. Välised jõud nimetatakse jõududeks, mis mõjuvad süsteemile kehadest, mis sellesse ei kuulu. Sellest vaatenurgast võib vabavõnkumisi määratleda kui võnkumisi süsteemis sisejõudude mõjul pärast süsteemi tasakaalust välja viimist.
Vaba vibratsiooni tekkimise tingimused on järgmised:
1) nendes jõu tekkimine, mis viib süsteemi pärast selle seisundist väljaviimist tagasi stabiilsesse tasakaaluasendisse;
2) süsteemis puudub hõõrdumine.
Vabavõnkumiste dünaamika.
Keha vibratsioon elastsusjõudude mõjul. Keha võnkuva liikumise võrrand elastsusjõu mõjul F() on võimalik saada, võttes arvesse Newtoni teist seadust ( F = ma) ja Hooke'i seadus ( F kontroll = -kx), kus m on kuuli mass ja on kiirendus, mille kuul saavutab elastsusjõu mõjul, k- vedru jäikuse koefitsient, X on keha nihkumine tasakaaluasendist (mõlemad võrrandid on kirjutatud projektsioonis horisontaalteljele Oh). Võrdstades nende võrrandite paremad pooled ja võttes arvesse, et kiirendus a on koordinaadi teine tuletis X(nihked), saame:
 .
.
Samamoodi kiirenduse avaldis a saame eristamise teel ( v = -v m sin ω 0 t = -v m x m cos (ω 0 t + π/2)):
a \u003d -a m cos ω 0 t,
kus a m = ω 2 0 x m on kiirenduse amplituud. Seega on harmooniliste võnkumiste kiiruse amplituud võrdeline sagedusega ja kiirenduse amplituud võrdeline võnkesageduse ruuduga.