Czym są oscylacje rodzaje oscylacji. Drgania mechaniczne. Parametry ruchu oscylacyjnego. Wahania. Okresowe wahania
W układzie oscylacyjnym następuje okresowe przejście jednego rodzaju energii na inny, gdy energia potencjalna (energia zależna od położenia układu) jest zamieniana na energię kinetyczną (energię ruchu) i odwrotnie.
Wizualną reprezentację procesu oscylacyjnego można uzyskać, konstruując wykres drgań pojedynczej masy we współrzędnych t(czas i tak(ruch).
Jeśli energia zewnętrzna wejdzie do układu oscylacyjnego, oscylacje będą wzrastać (rys. 16.6 a). Jeśli do systemu zachowawczego nie jest dostarczana energia zewnętrzna, oscylacje będą nietłumione (rys. 16.6 b). Jeśli energia układu zmniejszy się (na przykład z powodu tarcia w układzie dyssypacyjnym), oscylacje zostaną wytłumione (rys. 16.6 c).
Ważną cechą procesu oscylacyjnego jest kształt oscylacji. Przebieg - jest to krzywa pokazująca położenie punktów układu oscylacyjnego względem położenia równowagi w ustalonym punkcie czasu. Można zaobserwować najprostsze formy drgań. Na przykład wyraźnie widoczne są kształty fali drutu wiszącego między dwoma biegunami lub struny gitary.
Nazywane są oscylacje, które występują przy braku obciążenia zewnętrznego swobodne wibracje . Oscylacje swobodne układu rozpraszającego są tłumione, ponieważ zmniejsza się jego całkowita energia. Energia konserwatywnego systemu pozostaje stała, a jego swobodne oscylacje będą nietłumione. Jednak systemy konserwatywne nie istnieją w naturze, więc ich oscylacje są badane tylko teoretycznie. Nazywane są drgania swobodne układów zachowawczych własne wibracje .
Okresowe wahania są wibracje, które spełniają warunek y(t)=y(t+T). Tutaj T to okres oscylacji, tj. czas jednej oscylacji. Oscylacje okresowe mają również inne ważne cechy. Na przykład, amplituda a to połowa huśtawki? a=(y maks – tak min )/2 , częstotliwość kołowa to liczba oscylacji na 2 sekundy, częstotliwość techniczna f to liczba wibracji na sekundę. Obie te częstotliwości i okres są ze sobą powiązane:
(Hz), (rad/s).
Wibracje harmoniczne są oscylacje, które zmieniają się zgodnie z prawem lub Tutaj – faza oscylacji , – faza początkowa .
Wibracje wymuszone powstają pod wpływem sił zewnętrznych.
Wibracja to wymuszone oscylacje, które występują ze stosunkowo małą amplitudą i niezbyt niską częstotliwością.
4. Rodzaje obciążeń dynamicznych
Drgania konstrukcji powstają od obciążeń dynamicznych. W przeciwieństwie do obciążeń statycznych, obciążenia dynamiczne zmieniają się w czasie pod względem wielkości, kierunku lub położenia. Informują masy układu przyspieszenia, wywołują siły bezwładności, które mogą prowadzić do gwałtownego wzrostu drgań, a w efekcie do zniszczenia całej konstrukcji lub jej części.
Rozważ główne rodzaje obciążeń dynamicznych.
jest obciążeniem przyłożonym do konstrukcji po pewnym czasie. Źródłem obciążeń okresowych są różne maszyny i mechanizmy: silniki elektryczne, obrabiarki do metalu, wentylatory, wirówki itp. Jeżeli ich części wirujące nie są wyważone, to powodują obciążenie harmoniczne (zmiana obciążenia zgodnie z prawem sinusa lub cosinusa). Taki ładunek nazywa się obciążenie wibracjami . Sprężarki i pompy tłokowe, maszyny do tłoczenia, kruszarki, kafary itp. tworzą obciążenie nieharmoniczne .Obciążenia impulsowe powstają w wyniku wybuchu, spadających ładunków lub części elektrowni (młotów, kafarów itp.).
Przenoszenie ładunków są tworzone przez pociągi, transport samochodowy itp.
Są bardzo niebezpieczne niedeterministyczny (losowy) masa . Są to ładunki wiatrowe, sejsmiczne, wybuchowe.
1. Wahania. okresowe wahania. Wibracje harmoniczne.
2. Swobodne wibracje. Oscylacje nietłumione i tłumione.
3. Wibracje wymuszone. Rezonans.
4. Porównanie procesów oscylacyjnych. Energia nietłumionych oscylacji harmonicznych.
5. Samooscylacje.
6. Drgania ciała ludzkiego i ich rejestracja.
7. Podstawowe pojęcia i formuły.
8. Zadania.
1.1. Wahania. okresowe wahania.
Wibracje harmoniczne
wahania procesy różniące się różnym stopniem powtarzalności nazywane są tzw.
powtarzający się procesy zachodzą stale w każdym żywym organizmie, na przykład: skurcze serca, czynność płuc; drżymy, gdy jest nam zimno; słyszymy i mówimy dzięki wibracjom bębenków i strun głosowych; Podczas chodzenia nasze nogi wykonują ruchy oscylacyjne. Atomy, które sprawiają, że wibrujemy. Świat, w którym żyjemy, jest niezwykle podatny na wahania.
W zależności od fizycznego charakteru powtarzającego się procesu rozróżnia się oscylacje: mechaniczne, elektryczne itp. Ten wykład omawia wibracje mechaniczne.
Okresowe wahania
okresowy zwane takimi oscylacjami, w których wszystkie cechy ruchu powtarzają się po pewnym czasie.
W przypadku oscylacji okresowych stosuje się następujące cechy:
okres oscylacji T, równy czasowi, w którym ma miejsce jedna pełna oscylacja;
częstotliwość oscylacji v, równa liczbie oscylacji na sekundę (ν = 1/T);
amplituda oscylacji A, równe maksymalnemu przemieszczeniu z położenia równowagi.
Wibracje harmoniczne
Szczególne miejsce wśród okresowych wahań zajmuje harmoniczny wahania. Ich znaczenie wynika z następujących powodów. Po pierwsze, oscylacje w przyrodzie i technologii mają często charakter bardzo zbliżony do harmonicznych, a po drugie, procesy okresowe o różnej postaci (o różnej zależności czasowej) można przedstawić jako superpozycję kilku oscylacji harmonicznych.
Wibracje harmoniczne- są to oscylacje, w których obserwowana wartość zmienia się w czasie zgodnie z prawem sinusa lub cosinusa:
W matematyce funkcje tego rodzaju są nazywane harmoniczny, dlatego oscylacje opisane przez takie funkcje są również nazywane harmonicznymi.
Pozycja ciała wykonującego ruch oscylacyjny charakteryzuje się: przemieszczenie o pozycji równowagi. W tym przypadku wielkości we wzorze (1.1) mają następujące znaczenie:
X- stronniczość ciało w czasie t;
ALE - amplituda wahania równe maksymalnemu przemieszczeniu;
ω - częstotliwość kołowa oscylacje (liczba oscylacji wykonanych w 2 π sekund), związane z częstotliwością drgań przez współczynnik
φ = ( t +φ 0) - faza wahania (w czasie t); φ 0 - faza początkowa oscylacje (w t = 0).
 Ryż. 1.1. Wykresy przesunięcia w funkcji czasu dla x(0) = A i x(0) = 0
Ryż. 1.1. Wykresy przesunięcia w funkcji czasu dla x(0) = A i x(0) = 0
 1.2. Swobodne wibracje. Oscylacje nietłumione i tłumione
1.2. Swobodne wibracje. Oscylacje nietłumione i tłumione
darmowy lub własny nazywamy takimi oscylacjami, które występują w układzie pozostawionym samemu sobie, po wyprowadzeniu go z równowagi.
Przykładem jest oscylacja kulki zawieszonej na nitce. Aby wywołać wibracje, musisz albo popchnąć kulkę, albo odsuwając ją na bok, puścić. Po pchnięciu piłka zostaje poinformowana kinetyczny energię, a w przypadku odchylenia - potencjał.
Drgania swobodne są wykonywane dzięki początkowej rezerwie energii.
Swobodne, nietłumione wibracje
Oscylacje swobodne mogą być nietłumione tylko w przypadku braku siły tarcia. W przeciwnym razie początkowa podaż energii zostanie wydana na jej pokonanie, a zakres oscylacji zmniejszy się.
Jako przykład rozważmy drgania ciała zawieszonego na nieważkości sprężyny, które pojawiają się po odchyleniu ciała w dół, a następnie zwolnieniu (rys. 1.2).
 Ryż. 1.2. Wibracje ciała na sprężynie
Ryż. 1.2. Wibracje ciała na sprężynie
Od strony rozciągniętej sprężyny działa ciało siła sprężystości F proporcjonalna do wielkości przemieszczenia X:
Stały współczynnik k nazywa się wiosenna stawka i zależy od jego rozmiaru i materiału. Znak „-” oznacza, że siła sprężystości jest zawsze skierowana w kierunku przeciwnym do kierunku przemieszczenia, tj. do pozycji równowagi.
Przy braku tarcia siła sprężystości (1.4) jest jedyną siłą działającą na ciało. Zgodnie z drugim prawem Newtona (ma = F):
 Po przeniesieniu wszystkich wyrazów na lewą stronę i podzieleniu przez masę ciała (m) otrzymujemy równanie różniczkowe dla oscylacji swobodnych przy braku tarcia:
Po przeniesieniu wszystkich wyrazów na lewą stronę i podzieleniu przez masę ciała (m) otrzymujemy równanie różniczkowe dla oscylacji swobodnych przy braku tarcia:
 Wartość ω 0 (1,6) okazała się równa częstotliwości cyklicznej. Ta częstotliwość nazywa się własny.
Wartość ω 0 (1,6) okazała się równa częstotliwości cyklicznej. Ta częstotliwość nazywa się własny.
Zatem drgania swobodne przy braku tarcia są harmoniczne, jeśli odbiegając od położenia równowagi, siła sprężystości(1.4).
Własny okólnik częstotliwość jest główną cechą swobodnych oscylacji harmonicznych. Wartość ta zależy tylko od właściwości układu oscylacyjnego (w rozpatrywanym przypadku od masy korpusu i sztywności sprężyny). W dalszej części symbol ω 0 będzie zawsze używany do oznaczenia własna częstotliwość kołowa(tj. częstotliwość, przy której wystąpiłyby wibracje przy braku tarcia).
Amplituda drgań swobodnych zależy od właściwości układu oscylacyjnego (m, k) i energii mu przekazanej w początkowym momencie czasu.
W przypadku braku tarcia oscylacje swobodne, bliskie harmonicznym, powstają także w innych układach: wahadłach matematycznych i fizycznych (nie uwzględnia się teorii tych zagadnień) (rys. 1.3).
Wahadło matematyczne- mały korpus (punkt materialny) zawieszony na nici nieważkości (rys. 1.3 a). Jeżeli nić odchyli się od położenia równowagi o mały (do 5°) kąt α i zwolni, to ciało będzie oscylować z okresem określonym wzorem
 gdzie L to długość nici, g to przyspieszenie swobodnego spadania.
gdzie L to długość nici, g to przyspieszenie swobodnego spadania.
 Ryż. 1.3. Wahadło matematyczne (a), wahadło fizyczne (b)
Ryż. 1.3. Wahadło matematyczne (a), wahadło fizyczne (b)
fizyczne wahadło- sztywny korpus, który oscyluje pod wpływem grawitacji wokół stałej osi poziomej. Rysunek 1.3b przedstawia schematycznie wahadło fizyczne w postaci ciała o dowolnym kształcie, odchylonego od położenia równowagi o kąt α. Okres drgań wahadła fizycznego jest opisany wzorem
 gdzie J to moment bezwładności ciała względem osi, m to masa, h to odległość między środkiem ciężkości (punkt C) a osią zawieszenia (punkt O).
gdzie J to moment bezwładności ciała względem osi, m to masa, h to odległość między środkiem ciężkości (punkt C) a osią zawieszenia (punkt O).
Moment bezwładności jest wielkością zależną od masy ciała, jego wymiarów i położenia względem osi obrotu. Moment bezwładności obliczany jest za pomocą specjalnych wzorów.
Swobodne tłumione drgania
Siły tarcia działające w rzeczywistych układach znacząco zmieniają charakter ruchu: energia układu oscylacyjnego stale się zmniejsza, a oscylacje albo zanikać lub w ogóle nie występują.
Siła oporu skierowana jest w kierunku przeciwnym do ruchu ciała, a przy niezbyt dużych prędkościach jest proporcjonalna do prędkości:
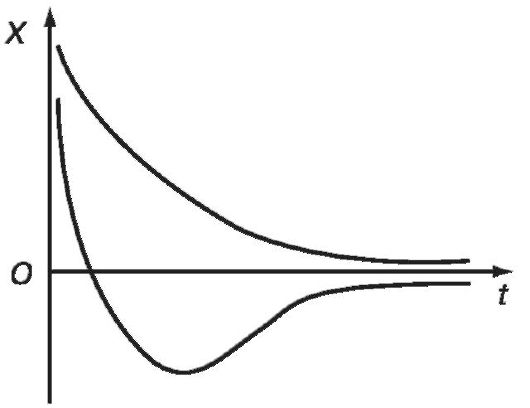
 Wykres takich wahań pokazano na ryc. 1.4.
Wykres takich wahań pokazano na ryc. 1.4.
Jako cechę stopnia tłumienia stosuje się wielkość bezwymiarową, zwaną logarytmiczny dekrement tłumieniaλ.
 Ryż. 1.4. Przemieszczenie w funkcji czasu dla drgań tłumionych
Ryż. 1.4. Przemieszczenie w funkcji czasu dla drgań tłumionych
Logarytmiczny dekrement tłumienia jest równy logarytmowi naturalnemu ze stosunku amplitudy poprzedniej oscylacji do amplitudy następnej oscylacji.
gdzie i jest liczbą porządkową oscylacji.
Łatwo zauważyć, że logarytmiczny dekrement tłumienia znajduje się we wzorze
Silne tłumienie. Na
jeżeli warunek β ≥ ω 0 jest spełniony, układ powraca do położenia równowagi bez oscylacji. Taki ruch nazywa się aperiodyczny. Rysunek 1.5 pokazuje dwa możliwe sposoby powrotu do pozycji równowagi podczas ruchu nieokresowego.
 Ryż. 1.5. ruch aperiodyczny
Ryż. 1.5. ruch aperiodyczny
1.3. Wibracje wymuszone, rezonans
Swobodne drgania w obecności sił tarcia są tłumione. Ciągłe oscylacje można tworzyć za pomocą okresowych działań zewnętrznych.
zmuszony nazywa się takie oscylacje, podczas których układ oscylacyjny jest wystawiony na działanie zewnętrznej siły okresowej (nazywa się to siłą napędową).
Niech siła napędowa zmieni się zgodnie z prawem harmonicznym
 Wykres oscylacji wymuszonych pokazano na ryc. 1.6.
Wykres oscylacji wymuszonych pokazano na ryc. 1.6.
 Ryż. 1.6. Wykres przemieszczenia w funkcji czasu dla drgań wymuszonych
Ryż. 1.6. Wykres przemieszczenia w funkcji czasu dla drgań wymuszonych
Widać, że amplituda oscylacji wymuszonych stopniowo osiąga stałą wartość. Drgania wymuszone ustalone są harmoniczne, a ich częstotliwość jest równa częstotliwości siły napędowej:
Amplitudę (A) stałych oscylacji wymuszonych określa wzór:
 Rezonans nazywa się osiągnięciem maksymalnej amplitudy wymuszonych oscylacji przy określonej wartości częstotliwości siły napędowej.
Rezonans nazywa się osiągnięciem maksymalnej amplitudy wymuszonych oscylacji przy określonej wartości częstotliwości siły napędowej.
Jeśli warunek (1.18) nie jest spełniony, rezonans nie powstaje. W tym przypadku wraz ze wzrostem częstotliwości siły napędowej amplituda drgań wymuszonych maleje monotonicznie, dążąc do zera.
Graficzną zależność amplitudy A oscylacji wymuszonych od częstotliwości kołowej siły napędowej przy różnych wartościach współczynnika tłumienia (β 1 > β 2 > β 3) pokazano na ryc. 1.7. Taki zestaw wykresów nazywamy krzywymi rezonansowymi.
W niektórych przypadkach silny wzrost amplitudy drgań przy rezonansie jest niebezpieczny dla wytrzymałości układu. Zdarzają się przypadki, gdy rezonans doprowadził do zniszczenia konstrukcji.
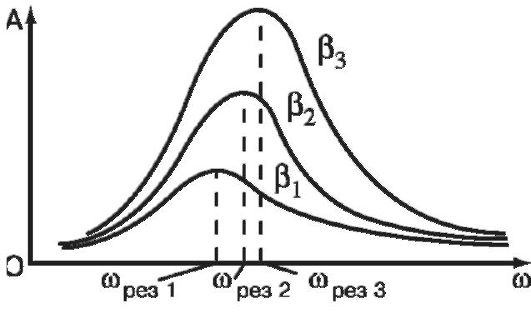 Ryż. 1.7. Krzywe rezonansowe
Ryż. 1.7. Krzywe rezonansowe
1.4. Porównanie procesów oscylacyjnych. Energia nietłumionych oscylacji harmonicznych
W tabeli 1.1 przedstawiono charakterystykę rozpatrywanych procesów oscylacyjnych.
Tabela 1.1. Charakterystyki drgań swobodnych i wymuszonych
 Energia nietłumionych oscylacji harmonicznych
Energia nietłumionych oscylacji harmonicznych
Ciało, które wykonuje oscylacje harmoniczne, ma dwa rodzaje energii: energię kinetyczną ruchu E k \u003d mv 2 / 2 i energię potencjalną E p związaną z działaniem siły sprężystej. Wiadomo, że pod działaniem siły sprężystości (1.4) energia potencjalna ciała jest określona wzorem E p = kx 2 /2. Dla nietłumionych oscylacji X= A cos(ωt), a prędkość ciała określa wzór v= - A ωsin(ωt). Z tego otrzymuje się wyrażenia dla energii ciała wykonującego nietłumione oscylacje:
 Całkowita energia układu, w którym występują nietłumione oscylacje harmoniczne, jest sumą tych energii i pozostaje niezmieniona:
Całkowita energia układu, w którym występują nietłumione oscylacje harmoniczne, jest sumą tych energii i pozostaje niezmieniona:
Tutaj m to masa ciała, ω i A to częstotliwość kołowa i amplituda drgań, k to współczynnik sprężystości.
1.5. Samooscylacje
Istnieją systemy, które same regulują okresowe uzupełnianie utraconej energii i dlatego mogą się wahać przez długi czas.
Samooscylacje- oscylacje nietłumione wspomagane przez zewnętrzne źródło energii, której zasilanie jest regulowane przez sam układ oscylacyjny.
Układy, w których występują takie oscylacje, nazywane są samooscylujące. Amplituda i częstotliwość samooscylacji zależą od właściwości samego układu samooscylującego. System samooscylacyjny można przedstawić za pomocą następującego schematu:
 W tym przypadku sam układ oscylacyjny poprzez kanał sprzężenia zwrotnego oddziałuje na regulator energii, informując go o stanie układu.
W tym przypadku sam układ oscylacyjny poprzez kanał sprzężenia zwrotnego oddziałuje na regulator energii, informując go o stanie układu.
Informacja zwrotna nazwano wpływem wyników dowolnego procesu na jego przebieg.
Jeżeli taki wpływ prowadzi do wzrostu intensywności procesu, wówczas sprzężenie zwrotne nazywa się pozytywny. Jeśli wpływ prowadzi do zmniejszenia intensywności procesu, wówczas nazywa się sprzężenie zwrotne negatywny.
W systemie samooscylującym może występować zarówno dodatnie, jak i ujemne sprzężenie zwrotne.
Przykładem systemu samooscylującego jest zegar, w którym wahadło otrzymuje wstrząsy pod wpływem energii podniesionego ciężaru lub skręconej sprężyny, a wstrząsy te występują w tych momentach, gdy wahadło przechodzi przez pozycję środkową.
Przykładami biologicznych układów samooscylacyjnych są takie narządy jak serce i płuca.
1.6. Drgania ludzkiego ciała i ich rejestracja
W praktyce medycznej szeroko stosowana jest analiza oscylacji wytwarzanych przez ludzkie ciało lub jego poszczególne części.
Ruchy oscylacyjne ludzkiego ciała podczas chodzenia
Chodzenie to złożony okresowy proces lokomotoryczny wynikający ze skoordynowanej aktywności mięśni szkieletowych tułowia i kończyn. Analiza procesu chodzenia dostarcza wielu funkcji diagnostycznych.
Cechą charakterystyczną chodzenia jest cykliczność pozycji podparcia jedną nogą (pojedynczy okres podparcia) lub dwiema nogami (podwójny okres podparcia). Zwykle stosunek tych okresów wynosi 4:1. Podczas chodzenia występuje okresowe przemieszczenie środka masy (CM) wzdłuż osi pionowej (zwykle o 5 cm) i odchylenie w bok (zwykle o 2,5 cm). W tym przypadku CM porusza się po krzywej, którą można w przybliżeniu przedstawić za pomocą funkcji harmonicznej (rys. 1.8).
 Ryż. 1.8. Przemieszczenie pionowe CM ciała ludzkiego podczas chodzenia
Ryż. 1.8. Przemieszczenie pionowe CM ciała ludzkiego podczas chodzenia
Złożone ruchy oscylacyjne przy zachowaniu pionowej pozycji ciała.
Osoba stojąca pionowo doświadcza złożonych oscylacji wspólnego środka masy (MCM) i środka nacisku (CP) stóp na płaszczyźnie podparcia. Na podstawie analizy tych wahań statokinezymetria- metoda oceny zdolności osoby do utrzymania wyprostowanej postawy. Utrzymując rzut GCM we współrzędnych granicy obszaru wsparcia. Metoda ta jest realizowana za pomocą analizatora stabilometrycznego, którego główną częścią jest stabiloplatforma, na której badany znajduje się w pozycji pionowej. Drgania wykonywane przez CP badanego przy zachowaniu pionowej postawy są przekazywane na stabiloplatformę i rejestrowane przez specjalne tensometry. Sygnały tensometryczne są przesyłane do urządzenia rejestrującego. W tym samym czasie jest nagrywany statokinesigram - trajektoria ruchu badanego w płaszczyźnie poziomej w dwuwymiarowym układzie współrzędnych. Zgodnie z widmem harmonicznym statokinesigramy można ocenić cechy pionizacji w normie iz odchyleniami od niej. Metoda ta umożliwia analizę wskaźników stabilności statokinetycznej (SCR) osoby.
Mechaniczne wibracje serca
Istnieją różne metody badania serca, które opierają się na mechanicznych procesach okresowych.
Balistokardiografia(BCG) - metoda badania mechanicznych objawów czynności serca, oparta na rejestracji pulsacyjnych mikroruchów ciała, wywołanych wyrzutem krwi z komór serca do dużych naczyń. Daje to początek zjawisku zwroty. Ciało ludzkie jest umieszczone na specjalnej ruchomej platformie umieszczonej na masywnym nieruchomym stole. Platforma w wyniku odrzutu wchodzi w złożony ruch oscylacyjny. Zależność przemieszczenia platformy z ciałem w czasie nazywa się balistokardiogramem (ryc. 1.9), którego analiza pozwala ocenić ruch krwi i stan czynności serca.
Apekskardiografia(AKG) – metoda graficznej rejestracji drgań klatki piersiowej o niskiej częstotliwości w obszarze uderzenia wierzchołka, wywołanych pracą serca. Rejestrację apekskardiogramu wykonuje się z reguły na wielokanałowym elektrokardiogramie.
 Ryż. 1.9. Rejestracja balistokardiogramu
Ryż. 1.9. Rejestracja balistokardiogramu
wykres z wykorzystaniem czujnika piezokrystalicznego, będącego konwerterem drgań mechanicznych na elektryczne. Przed rejestracją na przedniej ścianie klatki piersiowej punkt maksymalnej pulsacji (uderzenia wierzchołka) jest określany przez badanie dotykowe, w którym zamocowany jest czujnik. Na podstawie sygnałów z czujnika automatycznie tworzony jest apekskardiogram. Przeprowadzana jest analiza amplitudy ACG - amplitudy krzywej są porównywane w różnych fazach pracy serca z maksymalnym odchyleniem od linii zerowej - segment EO, przyjmowany jako 100%. Rycina 1.10 przedstawia apekskardiogram.
 Ryż. 1.10. Zapis apekskardiogramu
Ryż. 1.10. Zapis apekskardiogramu
Kinetokardiografia(KKG) – metoda rejestracji drgań ściany klatki piersiowej o niskiej częstotliwości, wywołanych czynnością serca. Kinetokardiogram różni się od apekskardiogramu: pierwszy rejestruje bezwzględne ruchy ściany klatki piersiowej w przestrzeni, drugi rejestruje fluktuacje przestrzeni międzyżebrowych w stosunku do żeber. Metoda ta określa przemieszczenie (KKG x), prędkość ruchu (KKG v) oraz przyspieszenie (KKG a) dla drgań klatki piersiowej. Rycina 1.11 przedstawia porównanie różnych kinetokardiogramów.
 Ryż. 1.11. Rejestracja kinetokardiogramów przemieszczenia (x), prędkości (v), przyspieszenia (a)
Ryż. 1.11. Rejestracja kinetokardiogramów przemieszczenia (x), prędkości (v), przyspieszenia (a)
Dynamokardiografia(DKG) – metoda oceny ruchu środka ciężkości klatki piersiowej. Dynamokardiograf pozwala na rejestrację sił działających na klatkę piersiową człowieka. Aby zarejestrować dynamokardiogram, pacjent kładzie się na stole leżącym na plecach. Pod klatką piersiową znajduje się urządzenie percepcyjne, które składa się z dwóch sztywnych metalowych płyt o wymiarach 30x30 cm, pomiędzy którymi znajdują się elastyczne elementy z zamontowanymi na nich czujnikami tensometrycznymi. Obciążenie działające na urządzenie odbiorcze, zmieniające się okresowo pod względem wielkości i miejsca przyłożenia, składa się z trzech składowych: 1) składowej stałej – masy klatki piersiowej; 2) zmienna – mechaniczny wpływ ruchów oddechowych; 3) zmienna – procesy mechaniczne towarzyszące skurczowi serca.
Zapis dynamokardiogramu odbywa się podczas wstrzymywania oddechu badanego w dwóch kierunkach: względem osi podłużnej i poprzecznej urządzenia odbiorczego. Porównanie różnych dynamokardiogramów przedstawiono na ryc. 1.12.
Sejsmokardiografia opiera się na rejestracji mechanicznych wibracji ludzkiego ciała wywołanych pracą serca. W tej metodzie za pomocą czujników zainstalowanych w okolicy podstawy wyrostka mieczykowatego rejestrowany jest impuls serca spowodowany mechaniczną czynnością serca w okresie skurczu. Jednocześnie zachodzą procesy związane z aktywnością mechanoreceptorów tkankowych łożyska naczyniowego, które aktywują się, gdy zmniejsza się objętość krwi krążącej. Sejsmokardiosygnał kształtuje drgania mostka.
 Ryż. 1.12. Rejestracja normalnych dynamokardiogramów podłużnych (a) i poprzecznych (b)
Ryż. 1.12. Rejestracja normalnych dynamokardiogramów podłużnych (a) i poprzecznych (b)
Wibracja
Powszechne wprowadzanie różnych maszyn i mechanizmów do życia ludzkiego zwiększa wydajność pracy. Jednak praca wielu mechanizmów wiąże się z występowaniem wibracji, które przenoszone są na człowieka i mają na niego szkodliwy wpływ.
Wibracja- wymuszone drgania ciała, w których oscyluje albo całe ciało, albo jego poszczególne części oscylują z różnymi amplitudami i częstotliwościami.
Osoba stale doświadcza różnego rodzaju efektów wibracyjnych w transporcie, w pracy, w domu. Wibracje powstałe w dowolnym miejscu ciała (na przykład ręka pracownika trzymającego młot pneumatyczny) rozchodzą się po całym ciele w postaci fal sprężystych. Fale te powodują w tkankach ciała zmienne deformacje różnego rodzaju (ściskanie, rozciąganie, ścinanie, zginanie). Wpływ drgań na człowieka wynika z wielu czynników charakteryzujących drgania: częstotliwości (widmo częstotliwości, częstotliwość podstawowa), amplituda, prędkość i przyspieszenie punktu oscylacyjnego, energia procesów oscylacyjnych.
Długotrwałe narażenie na wibracje powoduje uporczywe zaburzenia prawidłowych funkcji fizjologicznych organizmu. Może wystąpić „choroba wibracyjna”. Choroba ta prowadzi do szeregu poważnych zaburzeń w ludzkim ciele.
Wpływ, jaki drgania wywierają na organizm, zależy od intensywności, częstotliwości, czasu trwania drgań, miejsca ich stosowania i kierunku w stosunku do ciała, postawy, a także od stanu osoby i jej indywidualnych cech.
Wahania o częstotliwości 3-5 Hz powodują reakcje aparatu przedsionkowego, zaburzenia naczyniowe. Przy częstotliwościach 3-15 Hz obserwuje się zaburzenia związane z drganiami rezonansowymi poszczególnych narządów (wątroby, żołądka, głowy) i całego ciała. Wahania o częstotliwościach 11-45 Hz powodują niewyraźne widzenie, nudności i wymioty. Przy częstotliwościach przekraczających 45 Hz dochodzi do uszkodzenia naczyń mózgowych, upośledzenia krążenia krwi itp. Rysunek 1.13 przedstawia zakresy częstotliwości drgań, które mają szkodliwy wpływ na człowieka i jego układy narządów.
 Ryż. 1.13. Zakresy częstotliwości szkodliwego wpływu wibracji na człowieka
Ryż. 1.13. Zakresy częstotliwości szkodliwego wpływu wibracji na człowieka
Jednocześnie w niektórych przypadkach w medycynie wykorzystuje się wibracje. Na przykład za pomocą specjalnego wibratora dentysta przygotowuje amalgamat. Zastosowanie urządzeń wibracyjnych o wysokiej częstotliwości pozwala na wywiercenie w zębie otworu o skomplikowanym kształcie.
Wibrację wykorzystuje się również w masażu. Przy masażu manualnym masowane tkanki wprowadzane są w ruch oscylacyjny za pomocą rąk masażysty. Przy masażu sprzętowym stosuje się wibratory, w których końcówki o różnych kształtach przenoszą na ciało ruchy oscylacyjne. Urządzenia wibracyjne dzielą się na urządzenia do wibrowania ogólnego, powodującego drgania całego ciała (wibrujące „krzesło”, „łóżko”, „platforma” itp.) oraz urządzenia do miejscowego oddziaływania wibracji na poszczególne części ciała.
Mechanoterapia
W ćwiczeniach fizjoterapeutycznych (LFK) stosuje się symulatory, na których wykonywane są ruchy oscylacyjne różnych części ludzkiego ciała. Są używane w mechanoterapia - forma terapii ruchowej, której jednym z zadań jest wykonywanie dozowanych, rytmicznie powtarzanych ćwiczeń fizycznych w celu treningu lub przywrócenia ruchomości w stawach na urządzeniach typu wahadłowego. Podstawą tych urządzeń jest wyważanie (od fr. stabilizator- swing, balance) wahadło, czyli dwuramienna dźwignia wykonująca ruchy oscylacyjne (kołysanie) wokół stałej osi.
1.7. Podstawowe pojęcia i formuły
 Kontynuacja tabeli
Kontynuacja tabeli
 Kontynuacja tabeli
Kontynuacja tabeli
 Koniec tabeli
Koniec tabeli
 1.8. Zadania
1.8. Zadania
1. Podaj przykłady układów oscylacyjnych u ludzi.
2. U osoby dorosłej serce wykonuje 70 skurczów na minutę. Określ: a) częstotliwość skurczów; b) liczba cięć w 50 latach
Odpowiadać: a) 1,17 Hz; b) 1,84x10 9 .
3. Jaką długość musi mieć wahadło matematyczne, aby okres jego oscylacji był równy 1 sekundzie?
 4.
Cienki prosty jednorodny pręt o długości 1 m jest zawieszony na swoim końcu na osi. Określ: a) jaki jest okres jego oscylacji (mały)? b) jaka jest długość wahadła matematycznego o tym samym okresie oscylacji?
4.
Cienki prosty jednorodny pręt o długości 1 m jest zawieszony na swoim końcu na osi. Określ: a) jaki jest okres jego oscylacji (mały)? b) jaka jest długość wahadła matematycznego o tym samym okresie oscylacji?
 5.
Ciało o masie 1 kg oscyluje zgodnie z prawem x = 0,42 cos (7,40 t), gdzie t jest mierzone w sekundach, a x w metrach. Znajdź: a) amplitudę; b) częstotliwość; c) energia całkowita; d) energia kinetyczna i potencjalna przy x = 0,16 m.
5.
Ciało o masie 1 kg oscyluje zgodnie z prawem x = 0,42 cos (7,40 t), gdzie t jest mierzone w sekundach, a x w metrach. Znajdź: a) amplitudę; b) częstotliwość; c) energia całkowita; d) energia kinetyczna i potencjalna przy x = 0,16 m.
 6.
Oszacuj prędkość, z jaką osoba chodzi o długości kroku ja= 0,65 m. Długość nóg L = 0,8 m; środek ciężkości znajduje się w odległości H = 0,5 m od stopy. Dla momentu bezwładności nogi względem stawu biodrowego należy zastosować wzór I = 0,2mL 2 .
6.
Oszacuj prędkość, z jaką osoba chodzi o długości kroku ja= 0,65 m. Długość nóg L = 0,8 m; środek ciężkości znajduje się w odległości H = 0,5 m od stopy. Dla momentu bezwładności nogi względem stawu biodrowego należy zastosować wzór I = 0,2mL 2 .
 7.
Jak możesz określić masę małego ciała na pokładzie stacji kosmicznej, jeśli masz do dyspozycji zegar, sprężynę i zestaw ciężarków?
7.
Jak możesz określić masę małego ciała na pokładzie stacji kosmicznej, jeśli masz do dyspozycji zegar, sprężynę i zestaw ciężarków?
 8.
Amplituda oscylacji tłumionych zmniejsza się po 10 oscylacjach o 1/10 swojej pierwotnej wartości. Okres oscylacji T = 0,4 s. Określ dekrement logarytmiczny i współczynnik tłumienia.
8.
Amplituda oscylacji tłumionych zmniejsza się po 10 oscylacjach o 1/10 swojej pierwotnej wartości. Okres oscylacji T = 0,4 s. Określ dekrement logarytmiczny i współczynnik tłumienia.
Wstęp………………………………………………………………..
- Rodzaje i charakterystyka drgań.
- Wibracje mechaniczne………………………………………………….
- Drgania elektromagnetyczne………………………..
Literatura……………………………………………………………………..
Wstęp.
Wibracje to jeden z najczęstszych procesów występujących w przyrodzie i technologii. Wieżowce i przewody wysokiego napięcia drgają pod wpływem wiatru, wahadła zegara nakręcanego i samochodu na sprężynach podczas ruchu, poziomu rzeki w ciągu roku i temperatury ciała ludzkiego podczas choroby.
Dźwięk to wahania gęstości i ciśnienia powietrza, fale radiowe to okresowe zmiany natężenia pól elektrycznych i magnetycznych, światło widzialne to także oscylacje elektromagnetyczne, tylko o nieco innych długościach fal i częstotliwościach. Trzęsienia ziemi – drgania gleby, pływy – zmiany poziomu mórz i oceanów, wywołane przyciąganiem księżyca i osiąganie w niektórych obszarach 18 metrów, uderzenia tętna – okresowe skurcze mięśnia sercowego człowieka itp. Zmiana czuwania i snu, praca i odpoczynek, zima i lato...
Nawet nasze codzienne chodzenie do pracy i powrót do domu podpada pod definicję wahań, które są interpretowane jako procesy, które powtarzają się dokładnie lub w przybliżeniu w regularnych odstępach czasu.
Wibracje są mechaniczne, elektromagnetyczne, chemiczne, termodynamiczne i różne inne. Pomimo tej różnorodności, wszystkie mają ze sobą wiele wspólnego i dlatego są opisane tymi samymi równaniami różniczkowymi. Specjalna gałąź fizyki - teoria oscylacji - zajmuje się badaniem praw tych zjawisk. Muszą je znać stoczniowcy i budowniczowie samolotów, specjaliści od przemysłu i transportu, twórcy inżynierii radiowej i sprzętu akustycznego.
Wszelkie wahania charakteryzują się amplitudą - największym odchyleniem określonej wartości od jej wartości zerowej, okres ( T) lub częstotliwość ( v). Dwie ostatnie wielkości są ze sobą połączone odwrotnie proporcjonalną zależnością: T= 1/v. Częstotliwość drgań jest wyrażona w hercach (Hz). Nazwa jednostki miary pochodzi od nazwiska słynnego niemieckiego fizyka Heinricha Hertza (1857-1894). 1 Hz to jedna oscylacja na sekundę. W takim tempie bije ludzkie serce. Słowo „herc” w języku niemieckim oznacza „serce”. W razie potrzeby ten zbieg okoliczności może być postrzegany jako rodzaj symbolicznego połączenia.
Pierwszymi naukowcami, którzy badali oscylacje byli Galileo Galilei (1564...1642) i Christian Huygens (1629...1692). Galileusz ustalił izochronizm (niezależność okresu od amplitudy) niewielkich drgań, obserwując kołysanie się żyrandola w katedrze i mierząc czas uderzeniami pulsu na dłoni. Huygens wynalazł pierwszy zegar z wahadłem (1657), aw drugim wydaniu swojej monografii „Zegar wahadłowy” (1673) zbadał szereg problemów związanych z ruchem wahadła, w szczególności znalazł środek wychylenia wahadła fizycznego.
Wielki wkład w badanie oscylacji wniosło wielu naukowców: Anglików - W. Thomson (Lord Kelvin) iJ. Rayleigh , Rosjanie - A.S. Popow i P.N. Lebiediew, sowiecki - A.N. Kryłow, LI. Mandelstam, N.D. Papaleksi, N.N. Bogolubow, A.A. Andronow i inni.
1. Rodzaje oscylacji i ich charakterystyka.
oscylacyjny procesy (oscylacje) nazywane są ruchami lub zmianami stanu, które mają taki lub inny stopień powtórzenia w czasie.
Oscylacje nazywane są okresowymi, jeśli wartości wielkości fizycznych zmieniających się w procesie oscylacji powtarzają się w regularnych odstępach czasu T, zwanych okresem.
W zależności od natury fizycznej i mechanizmu wzbudzania oscylacji wyróżnia się:
- wibracje mechaniczne (drgania wahadeł, strun, belek, części maszyn i mechanizmów, kołysanie się statków, fale morskie, wahania ciśnienia podczas rozchodzenia się dźwięku w gazie, cieczy, ciele stałym itp.);
- oscylacje elektromagnetyczne (prąd przemienny, wahania prądu, ładunek, wektory) mi oraz H w obwodach oscylacyjnych itp.);
- drgania elektromechaniczne(drgania membran telefonicznych, dyfuzory głośników elektrodynamicznych itp.).
Ruchy oscylacyjne różnią się od innych rodzajów ruchów. Charakteryzują się pewnymi cechami wspólnymi. W języku teorii oscylacji różnice między ruchem oscylacyjnym ciała a procesami zachodzącymi w oscylacyjnych obwodach elektromagnetycznych znikają, jeśli podejdziemy do nich z punktu widzenia ogólnych zasad. Takie podejście nazywa się analogiami elektromechanicznymi.
System, który oscyluje nazywa się systemem oscylacyjnym.
Oscylacje, które powstają w wyniku jakiegokolwiek początkowego odchylenia układu od jego stabilnej równowagi, nazywane są oscylacjami naturalnymi.
Oscylacje występujące w układzie pod wpływem zmiennego wpływu zewnętrznego nazywane są oscylacjami wymuszonymi.
Ogólne cechy i koncepcje wspólne dla różnych systemów oscylacyjnych są następujące:
- równanie różniczkowe (jego postać jest taka sama dla wszystkich układów oscylujących);
- równanie oscylacji;
- amplituda;
- częstotliwość lub okres oscylacji;
- faza;
- faza początkowa.
Rozważmy fluktuacje w układach mechanicznych i elektromagnetycznych, podkreślając dokładnie wymienione powyżej cechy.
1.1 Drgania mechaniczne.
W zależności od charakteru oddziaływania na układ oscylacyjny rozróżnia się drgania swobodne, drgania wymuszone, drgania własne i drgania parametryczne.
Drgania swobodne to te, które pojawiają się w systemie pozostawionym samemu sobie po naciśnięciu na niego lub wyprowadzeniu go z równowagi. Przykładem jest oscylacja kuli zawieszonej na nitce (wahadło). Aby wywołać wibracje, możesz albo popchnąć kulkę, albo odsunąć ją na bok i wypuścić.
Drgania wymuszone nazywane są takimi oscylacjami, podczas których układ oscylacyjny jest wystawiony na działanie zewnętrznej, okresowo zmieniającej się siły. Przykładem są wibracje mostu, które pojawiają się, gdy przechodzą po nim ludzie idący krokiem.
Samo-oscylacjom, jak i wymuszonym, towarzyszy wpływ sił zewnętrznych na układ oscylacyjny, jednak momenty, w których te oddziaływania są realizowane, są wyznaczane przez sam układ oscylacyjny - sam układ kontroluje wpływ zewnętrzny . Przykładem układu samo-oscylacyjnego jest zegar, w którym wahadło otrzymuje wstrząsy pod wpływem energii uniesionego ciężaru lub skręconej sprężyny, a wstrząsy te występują w momentach przejścia wahadła przez pozycję środkową. Przy oscylacjach parametrycznych, pod wpływem czynników zewnętrznych, następuje okresowa zmiana jakiegoś parametru układu, na przykład długości gwintu, na którym zawieszona jest kulka, powodując oscylacje.
Najprostsze są oscylacje harmoniczne, tj. takie oscylacje, w których wartość oscylacyjna (na przykład odchylenie wahadła) zmienia się w czasie zgodnie z prawem sinusa lub cosinusa. Ten rodzaj oscylacji jest szczególnie ważny z następujących powodów: po pierwsze, oscylacje w przyrodzie i technologii mają często charakter bardzo zbliżony do harmonicznego, a po drugie, procesy okresowe o różnej postaci (o różnej zależności czasowej) mogą być reprezentowane jako nakładka kilka wibracji harmonicznych.
Jako mechaniczny układ oscylacyjny, na przykładzie którego będziemy rozważać oscylacje, wybieramy wahadło sprężynowe: mały korpus (punkt materialny) o masie m jest zawieszony na sprężynie o sztywności k (rysunek 2).
Nieobciążona sprężyna miała długość l 0 . Kiedy ciało było zawieszone, sprężyna wydłużała się o ∆l. Powstała siła sprężystości zrównoważyła siłę grawitacji. Ten stosunek pozwala nam określić równowaga wahadła sprężynowego. Jeśli teraz ciało zostanie przesunięte względem położenia równowagi o odległość x, to na ciało będzie działać siła sprężystości i siła grawitacji.
Wypadkowa tych sił to:
Znak minus oznacza, że kierunek siły F ex. a kierunek przemieszczenia x są przeciwne. Np. - siła sprężystości, która występuje, gdy ciało jest przemieszczone względem położenia równowagi w wyniku ściskania lub rozciągania sprężyny (w zależności od tego, po której stronie ciało jest odchylone od położenia równowagi). Jakościowo rysunek 1.1 pokazuje wynik działania siły sprężystej (im większe przemieszczenie, tym większa kontrola F).
Rysunek 1.1 - Pozycja wahadła sprężynowego podczas jednego okresu oscylacji.
Jeżeli układ oscyluje pod działaniem sił rozwijających się w samym układzie oscylacyjnym bez wpływów zewnętrznych i bez uwzględnienia sił oporu, wówczas oscylacje nazywamy nietłumione naturalne oscylacje.
Brak tłumienia oscylacji jest charakterystyczny dla idealnego układu oscylacyjnego, który jest model fizyczny rzeczywiste procesy fizyczne.
Równanie różniczkowe, odpowiadające oscylacjom wahadła sprężynowego, można uzyskać z prawa jego ruchu, które jest drugim prawem Newtona mama = F.
Biorąc pod uwagę, że przyspieszenie jest drugą pochodną przemieszczenia względem czasu
,
a siła działająca na ciało to siła sprężystości, wyznaczona dla małych przemieszczeń ciała z położenia równowagi zgodnie z prawem Hooke'a, jak otrzymujemy
lub
.
to równanie różniczkowe drugiego rzędu dla nietłumionych oscylacji. Jego główną cechą wyróżniającą jest to, że druga pochodna przemieszczenia względem czasu (tj. przyspieszenie) jest proporcjonalna do przemieszczenia. Równanie różniczkowe, w którym wartość x zawiera się w zerowej lub pierwszej potędze, nazywa się liniowy równanie różniczkowe. W dalszej części pokażemy, że równania tego rodzaju są charakterystyczne dla nietłumionych oscylacji w każdym idealnym układzie oscylacyjnym.
Wszystkie wyrazy równania przenosimy na lewą stronę i równanie różniczkowe sprowadzamy do postaci:
Wartość, oznacz to, otrzymujemy
Rozwiązaniem równania różniczkowego tego rodzaju są równania:
Lub
Te rozwiązania nazywają się równania oscylacji, pozwalają obliczyć przemieszczenie x wahadła sprężynowego w dowolnym momencie.
Oscylacje, w których charakteryzujące je wielkości fizyczne zmieniają się zgodnie z prawem sinusa lub cosinusa, nazywane są harmoniczny.
Różnica między argumentami funkcji sinus i cosinus polega na tj. .
W dalszej części będziemy najczęściej korzystać z rozwiązania równania różniczkowego w postaci
W równaniu oscylacji:
ALE - amplituda przemieszczenia jest maksymalnym odchyleniem wahadła od położenia równowagi;
X - stronniczość wahadło, czyli odchylenie punktu oscylacyjnego (ciała) od położenia równowagi w czasie t;
– faza oscylacji- wartość określająca położenie punktu oscylacyjnego w dowolnym momencie t;
α – faza początkowa określa położenie wahadła w momencie początkowym (t = 0).
Okres T to najkrótszy przedział czasu, w którym system powraca do swojej pierwotnej pozycji. W okresie oscylacji system wykonuje jedną pełną oscylację.
Częstotliwość oscylacje okresowe nazywane są wartością równą liczbie oscylacji na jednostkę czasu.
Częstotliwość cykliczna lub kołowa oscylacje okresowe nazywane są wartością równą liczbie oscylacji wykonanych w jednostce czasu.
Dla wahadła sprężynowego częstotliwość i okres drgań własnych w zależności od parametrów układu mają postać:
, .
Znając równanie przemieszczenia wahadła sprężynowego otrzymujemy podobne równania dla innych wielkości fizycznych. Znajdźmy prędkość, przyspieszenie, energię drgań, jeśli równanie przemieszczenia wahadła sprężynowego podane jest w postaci.
Prędkość drgania wahadła to pierwsza pochodna przemieszczenia:
Krótki opis
Wibracje to jeden z najczęstszych procesów występujących w przyrodzie i technologii. Wieżowce i przewody wysokiego napięcia drgają pod wpływem wiatru, wahadła zegara nakręcanego i samochodu na sprężynach podczas ruchu, poziomu rzeki w ciągu roku i temperatury ciała ludzkiego podczas choroby.
Wibracje mechaniczne………………………………………………….
Drgania elektromagnetyczne………………………..
Literatura…………………………………………………………………..
wahania- Są to ruchy lub procesy, które powtarzają się dokładnie lub w przybliżeniu w określonych odstępach czasu.
Drgania mechaniczne - wahania wielkości mechanicznych (przemieszczenie, prędkość, przyspieszenie, ciśnienie itp.).
Drgania mechaniczne (w zależności od charakteru sił) to:
darmowy;
wymuszony;
samo-oscylacje.
darmowy zwane wibracjami, które występują przy pojedynczym działaniu siły zewnętrznej (początkowy przekaz energii) oraz przy braku zewnętrznych wpływów na układ oscylacyjny.
Darmowe (lub własne)- są to drgania w układzie pod działaniem sił wewnętrznych, po wyprowadzeniu układu z równowagi (w warunkach rzeczywistych drgania swobodne są zawsze tłumione).
Warunki występowania swobodnych oscylacji
1. Układ oscylacyjny musi znajdować się w stabilnej równowadze.
2. Gdy układ jest wytrącony z równowagi, musi powstać siła wypadkowa, która przywraca układ do jego pierwotnej pozycji
3. Siły tarcia (oporu) są bardzo małe.
Wibracje wymuszone- wahania zachodzące pod wpływem sił zewnętrznych zmieniających się w czasie.
Samooscylacje- nietłumione oscylacje w układzie, wspomagane wewnętrznymi źródłami energii przy braku zewnętrznej siły zmiennej.
Częstotliwość i amplituda samooscylacji zależy od właściwości samego układu oscylacyjnego.
Samooscylacje różnią się od oscylacji swobodnych niezależnością amplitudy od czasu i od początkowego działania, które pobudza proces oscylacji.
System samooscylujący składa się z: systemu oscylacyjnego; źródło energii; urządzenie sprzężenia zwrotnego, które reguluje przepływ energii z wewnętrznego źródła energii do układu oscylacyjnego.
Energia pochodząca ze źródła w okresie jest równa energii traconej przez układ oscylacyjny w tym samym czasie.
Drgania mechaniczne dzielą się na:
zblakły;
nietłumiony.
tłumione wibracje- fluktuacje, których energia z czasem maleje.
Charakterystyka ruchu oscylacyjnego:
stały:
amplituda (A)
koniec dyskusji)
częstotliwość()
Największe (w wartości bezwzględnej) odchylenie ciała oscylującego od położenia równowagi nazywa się amplituda drgań. Zazwyczaj amplituda jest oznaczona literą A.
Nazywa się przedział czasu, w którym ciało wykonuje jedną pełną oscylację okres oscylacji.
Okres oscylacji jest zwykle oznaczony literą T, aw SI jest mierzony w sekundach (s).
Nazywa się liczbę oscylacji w jednostce czasu częstotliwość oscylacji.
Częstotliwość jest oznaczona literą v („nu”). Jednostką częstotliwości jest jedna oscylacja na sekundę. Jednostka ta nosi nazwę herc (Hz) na cześć niemieckiego naukowca Heinricha Hertza.
okres drgań T i częstotliwość drgań v są powiązane następującą zależnością:
T=1/lub=1/T.
Częstotliwość cykliczna (okrągła) ω to liczba oscylacji w 2π sekundach
Wibracje harmoniczne- drgania mechaniczne powstające pod działaniem siły proporcjonalnej do przemieszczenia i skierowanej przeciwnie do niego. Wibracje harmoniczne powstają zgodnie z prawem sinusa lub cosinusa.
Niech punkt materialny wykonuje drgania harmoniczne.
Równanie oscylacji harmonicznych ma postać:

a - przyspieszenie V - prędkość q - ładunek A - amplituda t - czas
(lub naturalne wibracje) są oscylacjami układu oscylacyjnego, wykonywanymi wyłącznie ze względu na początkowo zgłaszaną energię (potencjalną lub kinetyczną) przy braku wpływów zewnętrznych.
Energia potencjalna lub kinetyczna może być przekazywana na przykład w układach mechanicznych poprzez przemieszczenie początkowe lub prędkość początkową.
Swobodnie oscylujące ciała zawsze oddziałują z innymi ciałami i razem z nimi tworzą układ ciał zwany system oscylacyjny.
Na przykład, sprężyna, kula i pionowy słupek, do którego przymocowany jest górny koniec sprężyny (patrz rysunek poniżej), są zawarte w systemie oscylacyjnym. Tutaj kulka ślizga się swobodnie po strunie (siły tarcia są pomijalne). Jeśli przesuniesz piłkę w prawo i zostawisz ją samej sobie, będzie swobodnie oscylować wokół pozycji równowagi (punkt O) w wyniku działania siły sprężystej sprężyny skierowanej w kierunku położenia równowagi.
Innym klasycznym przykładem mechanicznego układu oscylacyjnego jest wahadło matematyczne (patrz rysunek poniżej). W tym przypadku kulka wykonuje swobodne oscylacje pod działaniem dwóch sił: grawitacji i siły sprężystości nici (Ziemia również wchodzi w układ oscylacyjny). Ich wypadkowa skierowana jest do położenia równowagi.

Nazywa się siły działające między ciałami układu oscylacyjnego siły wewnętrzne. Siły zewnętrzne nazywane są siłami działającymi na system z ciał, które nie są w nim zawarte. Z tego punktu widzenia drgania swobodne można zdefiniować jako drgania w układzie pod działaniem sił wewnętrznych po wyprowadzeniu układu z równowagi.
Warunkami występowania drgań swobodnych są:
1) pojawienie się w nich siły, która po wyprowadzeniu z tego stanu przywraca układ do pozycji stabilnej równowagi;
2) brak tarcia w układzie.
Dynamika drgań swobodnych.
Drgania ciała pod działaniem sił sprężystych. Równanie ruchu oscylacyjnego ciała pod działaniem siły sprężystej F() można uzyskać biorąc pod uwagę drugie prawo Newtona ( F = ma) i prawo Hooke'a ( Kontrola F = -kx), gdzie m jest masą piłki i jest przyspieszeniem uzyskiwanym przez piłkę pod działaniem siły sprężystości, k- współczynnik sztywności sprężyny, X jest przemieszczeniem ciała z położenia równowagi (oba równania są zapisane w rzucie na oś poziomą) Oh). Zrównanie prawych stron tych równań i uwzględnienie przyspieszenia a jest drugą pochodną współrzędnej X(offsety) otrzymujemy:
 .
.
Podobnie wyrażenie na przyspieszenie a otrzymujemy różnicując ( v = -v m sin ω 0 t = -v m x m cos (ω 0 t + π/2)):
a \u003d -a m cos ω 0 t,
gdzie a m = ω 2 0 x m to amplituda przyspieszenia. Zatem amplituda prędkości drgań harmonicznych jest proporcjonalna do częstotliwości, a amplituda przyspieszenia jest proporcjonalna do kwadratu częstotliwości drgań.