What are oscillations types of oscillations. Mechanical vibrations. Parameters of oscillatory motion. Fluctuations. Periodic fluctuations
In an oscillatory system, there is a periodic transition of one type of energy to another, when potential energy (energy depending on the position of the system) is converted into kinetic energy (energy of motion) and vice versa.
A visual representation of the oscillatory process can be obtained by constructing a graph of the oscillations of an individual mass in the coordinates t(time) and y(movement).
If external energy enters the oscillatory system, the oscillations will be increasing (Fig. 16.6 a). If no external energy is supplied to a conservative system, the oscillations will be undamped (Fig. 16.6 b). If the energy of the system decreases (for example, due to friction in a dissipative system), the oscillations will be damped (Fig. 16.6 c).
An important characteristic of the oscillatory process is the shape of the oscillations. Waveform - this is a curve showing the position of the points of the oscillatory system relative to the equilibrium position at a fixed point in time. The simplest forms of vibrations can be observed. For example, the waveforms of a wire hanging between two poles, or guitar strings, are clearly visible.
Oscillations that occur in the absence of an external load are called free vibrations . Free oscillations of a dissipative system are damped because its total energy decreases. The energy of a conservative system remains constant, and its free oscillations will be undamped. However, conservative systems do not exist in nature, so their oscillations are studied only theoretically. Free vibrations of conservative systems are called own vibrations .
Periodic fluctuations are vibrations that satisfy the condition y(t)=y(t+T). Here T is the oscillation period, i.e. time of one oscillation. Periodic oscillations have other important characteristics as well. For example, amplitude a is half the swing a=(y max – y min )/2 , circular frequency is the number of oscillations per 2 seconds, technical frequency f is the number of vibrations in one second. Both these frequencies and the period are interconnected:
(Hz), (rad/s).
Harmonic vibrations are oscillations that change according to the law or Here – oscillation phase , – initial phase .
Forced vibrations arise under the influence of external forces.
Vibration are forced oscillations that occur with a relatively small amplitude and not too low a frequency.
4. Types of dynamic loads
Vibrations of the structure arise from dynamic loads. Unlike static loads, dynamic loads change over time in magnitude, direction, or position. They inform the masses of the acceleration system, cause inertial forces, which can lead to a sharp increase in oscillations, and as a result, to the destruction of the entire structure or its parts.
Consider the main types of dynamic loads.
is the load applied to the structure after a certain period. The sources of periodic loads are various machines and mechanisms: electric motors, metalworking machines, fans, centrifuges, etc. If their rotating parts are not balanced, then they cause harmonic load (load changing according to the law of sine or cosine). Such a load is called vibration load . Reciprocating compressors and pumps, stamping machines, crushers, pile drivers, etc. create non-harmonic load .Impulse loads are created by an explosion, falling loads or parts of power plants (hammers, pile drivers, etc.).
Moving loads created by trains, motor transport, etc.
They are very dangerous non-deterministic (random) loads . These are wind, seismic, explosive loads.
1. Fluctuations. periodic fluctuations. Harmonic vibrations.
2. Free vibrations. Undamped and damped oscillations.
3. Forced vibrations. Resonance.
4. Comparison of oscillatory processes. Energy of undamped harmonic oscillations.
5. Self-oscillations.
6. Oscillations of the human body and their registration.
7. Basic concepts and formulas.
8. Tasks.
1.1. Fluctuations. periodic fluctuations.
Harmonic vibrations
fluctuations processes that differ in varying degrees of repetition are called.
recurring processes continuously occur inside any living organism, for example: heart contractions, lung function; we shiver when we are cold; we hear and speak thanks to the vibrations of the eardrums and vocal cords; When walking, our legs make oscillatory movements. The atoms that make us vibrate. The world we live in is remarkably prone to fluctuations.
Depending on the physical nature of the repeating process, oscillations are distinguished: mechanical, electrical, etc. This lecture discusses mechanical vibrations.
Periodic fluctuations
periodic called such oscillations in which all the characteristics of the movement are repeated after a certain period of time.
For periodic oscillations, the following characteristics are used:
oscillation period T, equal to the time during which one complete oscillation takes place;
oscillation frequencyν, equal to the number of oscillations per second (ν = 1/T);
oscillation amplitude A, equal to the maximum displacement from the equilibrium position.
Harmonic vibrations
A special place among periodic fluctuations is occupied by harmonic fluctuations. Their importance is due to the following reasons. Firstly, oscillations in nature and technology often have a character very close to harmonic, and secondly, periodic processes of a different form (with a different time dependence) can be represented as a superposition of several harmonic oscillations.
Harmonic vibrations- these are oscillations in which the observed value changes in time according to the law of sine or cosine:
In mathematics, functions of this kind are called harmonic, therefore, oscillations described by such functions are also called harmonic.
The position of a body that performs an oscillatory motion is characterized by displacement about the equilibrium position. In this case, the quantities in formula (1.1) have the following meaning:
X- bias body at time t;
BUT - amplitude fluctuations equal to the maximum displacement;
ω - circular frequency oscillations (the number of oscillations made in 2 π seconds), related to the oscillation frequency by the ratio
φ = (ωt +φ 0) - phase fluctuations (at time t); φ 0 - initial phase oscillations (at t = 0).
 Rice. 1.1. Plots of offset versus time for x(0) = A and x(0) = 0
Rice. 1.1. Plots of offset versus time for x(0) = A and x(0) = 0
 1.2. Free vibrations. Undamped and damped oscillations
1.2. Free vibrations. Undamped and damped oscillations
Free or own called such oscillations that occur in a system left to itself, after it has been taken out of equilibrium.
An example is the oscillation of a ball suspended on a thread. In order to cause vibrations, you need to either push the ball, or, moving it aside, release it. When pushed, the ball is informed kinetic energy, and in case of deviation - potential.
Free oscillations are performed due to the initial energy reserve.
Free undamped vibrations
Free oscillations can be undamped only in the absence of friction force. Otherwise, the initial supply of energy will be spent on overcoming it, and the range of oscillations will decrease.
As an example, consider the vibrations of a body suspended on a weightless spring, which occur after the body is deflected downward and then released (Fig. 1.2).
 Rice. 1.2. Vibrations of a body on a spring
Rice. 1.2. Vibrations of a body on a spring
From the side of the stretched spring, the body acts elastic force F proportional to the amount of displacement X:
The constant factor k is called spring rate and depends on its size and material. The "-" sign indicates that the elastic force is always directed in the direction opposite to the displacement direction, i.e. to the equilibrium position.
In the absence of friction, the elastic force (1.4) is the only force acting on the body. According to Newton's second law (ma = F):
 After transferring all the terms to the left side and dividing by the body mass (m), we obtain a differential equation for free oscillations in the absence of friction:
After transferring all the terms to the left side and dividing by the body mass (m), we obtain a differential equation for free oscillations in the absence of friction:
 The value ω 0 (1.6) turned out to be equal to the cyclic frequency. This frequency is called own.
The value ω 0 (1.6) turned out to be equal to the cyclic frequency. This frequency is called own.
Thus, free vibrations in the absence of friction are harmonic if, when deviating from the equilibrium position, elastic force(1.4).
Own circular frequency is the main characteristic of free harmonic oscillations. This value depends only on the properties of the oscillating system (in the case under consideration, on the mass of the body and the stiffness of the spring). In what follows, the symbol ω 0 will always be used to denote own circular frequency(i.e., the frequency at which vibrations would occur in the absence of friction).
Amplitude of free vibrations is determined by the properties of the oscillatory system (m, k) and the energy imparted to it at the initial moment of time.
In the absence of friction, free oscillations close to harmonic ones also arise in other systems: mathematical and physical pendulums (the theory of these issues is not considered) (Fig. 1.3).
Mathematical pendulum- a small body (material point) suspended on a weightless thread (Fig. 1.3 a). If the thread is deflected from the equilibrium position by a small (up to 5°) angle α and released, then the body will oscillate with a period determined by the formula
 where L is the length of the thread, g is the free fall acceleration.
where L is the length of the thread, g is the free fall acceleration.
 Rice. 1.3. Mathematical pendulum (a), physical pendulum (b)
Rice. 1.3. Mathematical pendulum (a), physical pendulum (b)
physical pendulum- a rigid body that oscillates under the action of gravity around a fixed horizontal axis. Figure 1.3 b schematically shows a physical pendulum in the form of a body of arbitrary shape, deviated from the equilibrium position by an angle α. The oscillation period of a physical pendulum is described by the formula
 where J is the moment of inertia of the body about the axis, m is the mass, h is the distance between the center of gravity (point C) and the suspension axis (point O).
where J is the moment of inertia of the body about the axis, m is the mass, h is the distance between the center of gravity (point C) and the suspension axis (point O).
The moment of inertia is a quantity that depends on the mass of the body, its dimensions and position relative to the axis of rotation. The moment of inertia is calculated using special formulas.
Free damped vibrations
Friction forces acting in real systems significantly change the nature of motion: the energy of an oscillatory system constantly decreases, and oscillations either fade out or do not occur at all.
The resistance force is directed in the direction opposite to the movement of the body, and at not very high speeds it is proportional to the speed:
 A graph of such fluctuations is shown in Fig. 1.4.
A graph of such fluctuations is shown in Fig. 1.4.
As a characteristic of the degree of attenuation, a dimensionless quantity is used, called logarithmic damping decrementλ.
 Rice. 1.4. Displacement versus time for damped oscillations
Rice. 1.4. Displacement versus time for damped oscillations
Logarithmic damping decrement is equal to the natural logarithm of the ratio of the amplitude of the previous oscillation to the amplitude of the subsequent oscillation.
where i is the ordinal number of the oscillation.
It is easy to see that the logarithmic damping decrement is found by the formula
Strong attenuation. At
if the condition β ≥ ω 0 is fulfilled, the system returns to the equilibrium position without oscillating. Such a movement is called aperiodic. Figure 1.5 shows two possible ways to return to the equilibrium position during aperiodic motion.
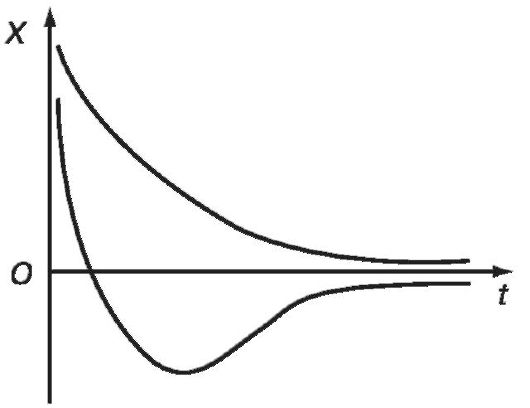 Rice. 1.5. aperiodic motion
Rice. 1.5. aperiodic motion
1.3. Forced vibrations, resonance
Free vibrations in the presence of friction forces are damped. Continuous oscillations can be created with the help of a periodic external action.
compelled such oscillations are called, during which the oscillating system is exposed to an external periodic force (it is called a driving force).
Let the driving force change according to the harmonic law
 The graph of forced oscillations is shown in Fig. 1.6.
The graph of forced oscillations is shown in Fig. 1.6.
 Rice. 1.6. Plot of displacement versus time for forced vibrations
Rice. 1.6. Plot of displacement versus time for forced vibrations
It can be seen that the amplitude of forced oscillations reaches a steady value gradually. The steady forced oscillations are harmonic, and their frequency is equal to the frequency of the driving force:
The amplitude (A) of steady forced oscillations is found by the formula:
 Resonance is called the achievement of the maximum amplitude of forced oscillations at a certain value of the frequency of the driving force.
Resonance is called the achievement of the maximum amplitude of forced oscillations at a certain value of the frequency of the driving force.
If condition (1.18) is not satisfied, then resonance does not arise. In this case, as the frequency of the driving force increases, the amplitude of forced oscillations decreases monotonically, tending to zero.
The graphical dependence of the amplitude A of forced oscillations on the circular frequency of the driving force at different values of the damping coefficient (β 1 > β 2 > β 3) is shown in fig. 1.7. Such a set of graphs is called resonance curves.
In some cases, a strong increase in the amplitude of oscillations at resonance is dangerous for the strength of the system. There are cases when resonance led to the destruction of structures.
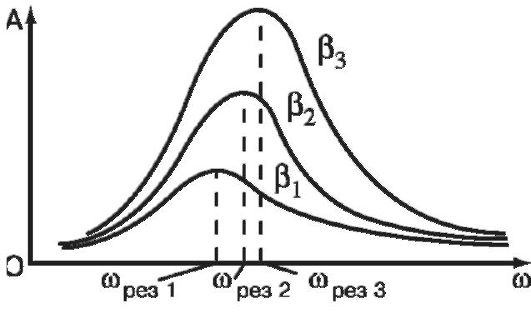 Rice. 1.7. Resonance curves
Rice. 1.7. Resonance curves
1.4. Comparison of oscillatory processes. Energy of undamped harmonic oscillations
Table 1.1 presents the characteristics of the considered oscillatory processes.
Table 1.1. Characteristics of free and forced vibrations
 Energy of undamped harmonic oscillations
Energy of undamped harmonic oscillations
A body that performs harmonic oscillations has two types of energy: the kinetic energy of motion E k \u003d mv 2 / 2 and the potential energy E p associated with the action of an elastic force. It is known that under the action of elastic force (1.4) the potential energy of the body is determined by the formula E p = kx 2 /2. For undamped oscillations X= A cos(ωt), and the speed of the body is determined by the formula v= - A ωsin(ωt). From this, expressions are obtained for the energies of a body performing undamped oscillations:
 The total energy of the system in which undamped harmonic oscillations occur is the sum of these energies and remains unchanged:
The total energy of the system in which undamped harmonic oscillations occur is the sum of these energies and remains unchanged:
Here m is the mass of the body, ω and A are the circular frequency and amplitude of oscillations, k is the coefficient of elasticity.
1.5. Self-oscillations
There are systems that themselves regulate the periodic replenishment of lost energy and therefore can fluctuate for a long time.
Self-oscillations- undamped oscillations supported by an external source of energy, the supply of which is regulated by the oscillatory system itself.
Systems in which such oscillations occur are called self-oscillating. The amplitude and frequency of self-oscillations depend on the properties of the self-oscillating system itself. The self-oscillatory system can be represented by the following scheme:
 In this case, the oscillatory system itself, through a feedback channel, affects the energy regulator, informing it about the state of the system.
In this case, the oscillatory system itself, through a feedback channel, affects the energy regulator, informing it about the state of the system.
Feedback called the impact of the results of any process on its course.
If such an impact leads to an increase in the intensity of the process, then the feedback is called positive. If the impact leads to a decrease in the intensity of the process, then the feedback is called negative.
In a self-oscillating system, both positive and negative feedback can be present.
An example of a self-oscillating system is a clock in which the pendulum receives shocks due to the energy of a raised weight or a twisted spring, and these shocks occur at those moments when the pendulum passes through the middle position.
Examples of biological self-oscillatory systems are such organs as the heart and lungs.
1.6. Oscillations of the human body and their registration
The analysis of oscillations created by the human body or its individual parts is widely used in medical practice.
Oscillatory movements of the human body when walking
Walking is a complex periodic locomotor process resulting from the coordinated activity of the skeletal muscles of the trunk and limbs. Analysis of the walking process provides many diagnostic features.
A characteristic feature of walking is the periodicity of the support position with one foot (single support period) or two legs (double support period). Normally, the ratio of these periods is 4:1. When walking, there is a periodic displacement of the center of mass (CM) along the vertical axis (normally by 5 cm) and deviation to the side (normally by 2.5 cm). In this case, the CM moves along a curve, which can be approximately represented by a harmonic function (Fig. 1.8).
 Rice. 1.8. Vertical displacement of the CM of the human body during walking
Rice. 1.8. Vertical displacement of the CM of the human body during walking
Complex oscillatory movements while maintaining the vertical position of the body.
A person standing vertically experiences complex oscillations of the common center of mass (MCM) and center of pressure (CP) of the feet on the support plane. Based on the analysis of these fluctuations statokinesimetry- a method for assessing a person's ability to maintain an upright posture. By keeping the GCM projection within the coordinates of the boundary of the support area. This method is implemented using a stabilometric analyzer, the main part of which is a stabiloplatform, on which the subject is in a vertical position. Oscillations made by the subject's CP while maintaining a vertical posture are transmitted to the stabiloplatform and recorded by special strain gauges. The strain gauge signals are transmitted to the recording device. At the same time, it is recorded statokinesigram - the trajectory of the test subject's movement on a horizontal plane in a two-dimensional coordinate system. According to the harmonic spectrum statokinesigrams it is possible to judge the features of verticalization in the norm and with deviations from it. This method makes it possible to analyze the indicators of statokinetic stability (SCR) of a person.
Mechanical vibrations of the heart
There are various methods for studying the heart, which are based on mechanical periodic processes.
Ballistocardiography(BCG) - a method for studying the mechanical manifestations of cardiac activity, based on the registration of pulse micro-movements of the body, caused by the ejection of blood from the ventricles of the heart into large vessels. This gives rise to the phenomenon returns. The human body is placed on a special movable platform located on a massive fixed table. The platform as a result of recoil comes into a complex oscillatory motion. The dependence of the displacement of the platform with the body on time is called a ballistocardiogram (Fig. 1.9), the analysis of which allows one to judge the movement of blood and the state of cardiac activity.
Apexcardiography(AKG) - a method of graphic registration of low-frequency oscillations of the chest in the area of the apex beat, caused by the work of the heart. Registration of the apexcardiogram is performed, as a rule, on a multichannel electrocardiogram.
 Rice. 1.9. Recording a ballistocardiogram
Rice. 1.9. Recording a ballistocardiogram
graph using a piezocrystalline sensor, which is a converter of mechanical vibrations into electrical ones. Before recording on the anterior wall of the chest, the point of maximum pulsation (apex beat) is determined by palpation, in which the sensor is fixed. Based on the sensor signals, an apexcardiogram is automatically built. An amplitude analysis of the ACG is carried out - the amplitudes of the curve are compared at different phases of the work of the heart with a maximum deviation from the zero line - the EO segment, taken as 100%. Figure 1.10 shows the apexcardiogram.
 Rice. 1.10. Apexcardiogram recording
Rice. 1.10. Apexcardiogram recording
Kinetocardiography(KKG) - a method of recording low-frequency vibrations of the chest wall, caused by cardiac activity. The kinetocardiogram differs from the apexcardiogram: the first records the absolute movements of the chest wall in space, the second records the fluctuations of the intercostal spaces relative to the ribs. This method determines the displacement (KKG x), the speed of movement (KKG v) as well as the acceleration (KKG a) for chest oscillations. Figure 1.11 shows a comparison of various kinetocardiograms.
 Rice. 1.11. Recording kinetocardiograms of displacement (x), speed (v), acceleration (a)
Rice. 1.11. Recording kinetocardiograms of displacement (x), speed (v), acceleration (a)
Dynamocardiography(DKG) - a method for assessing the movement of the center of gravity of the chest. Dynamocardiograph allows you to register the forces acting from the human chest. To record a dynamocardiogram, the patient is positioned on the table lying on his back. Under the chest there is a perceiving device, which consists of two rigid metal plates measuring 30x30 cm, between which there are elastic elements with strain gauges mounted on them. Periodically changing in magnitude and place of application, the load acting on the receiving device is composed of three components: 1) a constant component - the mass of the chest; 2) variable - mechanical effect of respiratory movements; 3) variable - mechanical processes accompanying cardiac contraction.
Recording of dynamocardiogram is carried out while holding the breath of the subject in two directions: relative to the longitudinal and transverse axes of the receiving device. Comparison of various dynamocardiograms is shown in fig. 1.12.
Seismocardiography is based on the registration of mechanical vibrations of the human body caused by the work of the heart. In this method, using sensors installed in the region of the base of the xiphoid process, a cardiac impulse is recorded due to the mechanical activity of the heart during the period of contraction. In this case, there are processes associated with the activity of tissue mechanoreceptors of the vascular bed, which are activated when the volume of circulating blood decreases. The seismocardiosignal forms the shape of the sternum oscillations.
 Rice. 1.12. Recording of normal longitudinal (a) and transverse (b) dynamocardiograms
Rice. 1.12. Recording of normal longitudinal (a) and transverse (b) dynamocardiograms
Vibration
The widespread introduction of various machines and mechanisms into human life increases labor productivity. However, the work of many mechanisms is associated with the occurrence of vibrations that are transmitted to a person and have a harmful effect on him.
Vibration- forced oscillations of the body, in which either the whole body oscillates as a whole, or its separate parts oscillate with different amplitudes and frequencies.
A person constantly experiences various kinds of vibrational effects in transport, at work, at home. Vibrations that have arisen in any place of the body (for example, the hand of a worker holding a jackhammer) propagate throughout the body in the form of elastic waves. These waves cause variable deformations of various types in the tissues of the body (compression, tension, shear, bending). The effect of vibrations on a person is due to many factors that characterize vibrations: frequency (frequency spectrum, fundamental frequency), amplitude, speed and acceleration of an oscillating point, energy of oscillatory processes.
Prolonged exposure to vibrations causes persistent disturbances in normal physiological functions in the body. "Vibration sickness" may occur. This disease leads to a number of serious disorders in the human body.
The influence that vibrations have on the body depends on the intensity, frequency, duration of vibrations, the place of their application and direction in relation to the body, posture, as well as on the state of the person and his individual characteristics.
Fluctuations with a frequency of 3-5 Hz cause reactions of the vestibular apparatus, vascular disorders. At frequencies of 3-15 Hz, disorders associated with resonant vibrations of individual organs (liver, stomach, head) and the body as a whole are observed. Fluctuations with frequencies of 11-45 Hz cause blurred vision, nausea, and vomiting. At frequencies exceeding 45 Hz, damage to the vessels of the brain, impaired blood circulation, etc. occur. Figure 1.13 shows the vibration frequency ranges that have a harmful effect on a person and his organ systems.
 Rice. 1.13. The frequency ranges of the harmful effects of vibration on humans
Rice. 1.13. The frequency ranges of the harmful effects of vibration on humans
At the same time, in some cases, vibrations are used in medicine. For example, using a special vibrator, the dentist prepares an amalgam. The use of high-frequency vibration devices allows drilling a hole of complex shape in the tooth.
Vibration is also used in massage. With manual massage, the massaged tissues are brought into oscillatory motion with the help of the massage therapist's hands. With hardware massage, vibrators are used, in which tips of various shapes are used to transmit oscillatory movements to the body. Vibrating devices are divided into devices for general vibration, causing shaking of the whole body (vibrating "chair", "bed", "platform", etc.), and devices for local vibration impact on individual parts of the body.
Mechanotherapy
In physiotherapy exercises (LFK), simulators are used, on which oscillatory movements of various parts of the human body are carried out. They are used in mechanotherapy - form of exercise therapy, one of the tasks of which is the implementation of dosed, rhythmically repeated physical exercises for the purpose of training or restoring mobility in the joints on pendulum-type devices. The basis of these devices is balancing (from fr. balancer- swing, balance) a pendulum, which is a two-arm lever that performs oscillatory (rocking) movements around a fixed axis.
1.7. Basic concepts and formulas
 Table continuation
Table continuation
 Table continuation
Table continuation
 End of table
End of table
 1.8. Tasks
1.8. Tasks
1. Give examples of oscillatory systems in humans.
2. In an adult, the heart makes 70 contractions per minute. Determine: a) the frequency of contractions; b) the number of cuts in 50 years
Answer: a) 1.17 Hz; b) 1.84x10 9 .
3. What length must a mathematical pendulum have in order for its period of oscillation to be equal to 1 second?
 4.
A thin straight homogeneous rod 1 m long is suspended by its end on an axis. Determine: a) what is the period of its oscillations (small)? b) what is the length of a mathematical pendulum with the same period of oscillation?
4.
A thin straight homogeneous rod 1 m long is suspended by its end on an axis. Determine: a) what is the period of its oscillations (small)? b) what is the length of a mathematical pendulum with the same period of oscillation?
 5.
A body with a mass of 1 kg oscillates according to the law x = 0.42 cos (7.40t), where t is measured in seconds, and x is measured in meters. Find: a) amplitude; b) frequency; c) total energy; d) kinetic and potential energies at x = 0.16 m.
5.
A body with a mass of 1 kg oscillates according to the law x = 0.42 cos (7.40t), where t is measured in seconds, and x is measured in meters. Find: a) amplitude; b) frequency; c) total energy; d) kinetic and potential energies at x = 0.16 m.
 6.
Estimate the speed at which a person walks with a stride length l= 0.65 m. Leg length L = 0.8 m; the center of gravity is at a distance H = 0.5 m from the foot. For the moment of inertia of the leg relative to the hip joint, use the formula I = 0.2mL 2 .
6.
Estimate the speed at which a person walks with a stride length l= 0.65 m. Leg length L = 0.8 m; the center of gravity is at a distance H = 0.5 m from the foot. For the moment of inertia of the leg relative to the hip joint, use the formula I = 0.2mL 2 .
 7.
How can you determine the mass of a small body aboard a space station if you have a clock, a spring, and a set of weights at your disposal?
7.
How can you determine the mass of a small body aboard a space station if you have a clock, a spring, and a set of weights at your disposal?
 8.
The amplitude of damped oscillations decreases in 10 oscillations by 1/10 of its original value. Oscillation period T = 0.4 s. Determine the logarithmic decrement and damping factor.
8.
The amplitude of damped oscillations decreases in 10 oscillations by 1/10 of its original value. Oscillation period T = 0.4 s. Determine the logarithmic decrement and damping factor.
Introduction………………………………………………………………..
- Types and characteristics of vibrations.
- Mechanical vibrations…………………………………………….
- Electromagnetic oscillations………………………..
Literature……………………………………………………………………..
Introduction.
Vibrations are one of the most common processes in nature and technology. High-rise buildings and high-voltage wires oscillate under the influence of the wind, the pendulum of a wound clock and a car on springs during movement, the level of the river during the year and the temperature of the human body during illness.
Sound is fluctuations in the density and pressure of air, radio waves are periodic changes in the strength of electric and magnetic fields, visible light is also electromagnetic oscillations, only with slightly different wavelengths and frequencies. Earthquakes - soil vibrations, tides - changes in the level of the seas and oceans, caused by the attraction of the moon and reaching 18 meters in some areas, pulse beats - periodic contractions of the human heart muscle, etc. Change of wakefulness and sleep, work and rest, winter and summer...
Even our everyday going to work and returning home falls under the definition of fluctuations, which are interpreted as processes that repeat exactly or approximately at regular intervals.
Vibrations are mechanical, electromagnetic, chemical, thermodynamic and various others. Despite this diversity, they all have much in common and are therefore described by the same differential equations. A special branch of physics - the theory of oscillations - deals with the study of the laws of these phenomena. Shipbuilders and aircraft builders, industry and transport specialists, creators of radio engineering and acoustic equipment need to know them.
Any fluctuations are characterized by amplitude - the largest deviation of a certain value from its zero value, period ( T) or frequency ( v). The last two quantities are interconnected by an inversely proportional relationship: T= 1/v. The oscillation frequency is expressed in hertz (Hz). The unit of measurement is named after the famous German physicist Heinrich Hertz (1857-1894). 1 Hz is one oscillation per second. This is the rate at which the human heart beats. The word "hertz" in German means "heart". If desired, this coincidence can be seen as a kind of symbolic connection.
The first scientists who studied oscillations were Galileo Galilei (1564...1642) and Christian Huygens (1629...1692). Galileo established isochronism (independence of the period from the amplitude) of small oscillations, watching the swinging of the chandelier in the cathedral and measuring the time by the beats of the pulse on his hand. Huygens invented the first pendulum clock (1657) and in the second edition of his monograph "Pendulum Clock" (1673) investigated a number of problems associated with the movement of the pendulum, in particular, found the center of swing of a physical pendulum.
A great contribution to the study of oscillations was made by many scientists: English - W. Thomson (Lord Kelvin) andJ. Rayleigh , Russians - A.S. Popov and P.N. Lebedev, Soviet - A.N. Krylov, L.I. Mandelstam, N.D. Papaleksi, N.N. Bogolyubov, A.A. Andronov and others.
1. Types of oscillations and their characteristics.
oscillatory processes (oscillations) are called movements or changes in state, which have a certain degree of repetition in time.
Oscillations are called periodic if the values of physical quantities that change in the process of oscillations are repeated at regular intervals T, called the period.
Depending on the physical nature and mechanism of excitation of oscillations, there are:
- mechanical vibrations (oscillations of pendulums, strings, beams, parts of machines and mechanisms, rolling of ships, waves of the sea, pressure fluctuations during the propagation of sound in a gas, liquid, solid, etc.);
- electromagnetic oscillations (alternating current, fluctuations in current, charge, vectors E and H in oscillatory circuits, etc.);
- electromechanical vibrations(oscillations of telephone membranes, diffusers of electrodynamic loudspeakers, etc.).
Oscillatory movements are different from other types of movements. They are characterized by some common features. In the language of the theory of oscillations, the differences between the oscillatory motion of a body and the processes in oscillatory electromagnetic circuits disappear if we approach them from the point of view of general principles. This approach is called electromechanical analogies.
A system that oscillates is called an oscillatory system.
Oscillations that arise as a result of any initial deviation of the system from its stable equilibrium are called natural oscillations.
Oscillations that occur in the system under the influence of a variable external influence are called forced oscillations.
General features and concepts common to various oscillatory systems are as follows:
- differential equation (its form is the same for any oscillating systems);
- oscillation equation;
- amplitude;
- frequency or period of oscillation;
- phase;
- initial phase.
Let's consider fluctuations in mechanical and electromagnetic systems, highlighting exactly the features listed above.
1.1 Mechanical vibrations.
Depending on the nature of the impact on an oscillating system, free oscillations, forced oscillations, self-oscillations and parametric oscillations are distinguished.
Free vibrations are those that occur in a system left to itself after a push has been given to it or it has been taken out of equilibrium. An example is the oscillation of a ball suspended on a thread (pendulum). In order to cause vibrations, you can either push the ball, or take it aside and release it.
Forced oscillations are called such oscillations, during which the oscillating system is exposed to an external periodically changing force. An example is the vibrations of a bridge that occur when people walking in step pass over it.
Self-oscillations, as well as forced oscillations, are accompanied by the influence of external forces on the oscillating system, however, the moments of time when these influences are carried out are set by the oscillating system itself - the system itself controls the external influence. An example of a self-oscillatory system is a clock in which the pendulum receives shocks due to the energy of a raised weight or a twisted spring, and these shocks occur at the moments of the pendulum passing through the middle position. With parametric oscillations, due to external influence, a periodic change in some parameter of the system occurs, for example, the length of the thread to which the ball is suspended, making oscillations.
The simplest are harmonic oscillations, i.e. such oscillations in which the oscillating value (for example, the deviation of the pendulum) changes with time according to the law of sine or cosine. This type of oscillation is especially important for the following reasons: firstly, oscillations in nature and technology often have a character very close to harmonic, and secondly, periodic processes of a different form (with a different time dependence) can be represented as an overlay several harmonic vibrations.
As a mechanical oscillatory system, on the example of which we will consider oscillations, we choose spring pendulum: a small body (material point) of mass m is suspended on a spring with stiffness k (Figure 2).
The unloaded spring had a length l 0 . When the body was suspended, the spring lengthened by ∆l. The resulting elastic force balanced the force of gravity. This ratio allows us to determine equilibrium position of a spring pendulum. If now the body is displaced relative to the equilibrium position by a distance x, then the elastic force and the force of gravity will act on the body.
The resultant of these forces is:
The minus sign means that the direction of the force F ex. and the direction of displacement x are opposite. F ex. - the elastic force that occurs when the body is displaced relative to the equilibrium position due to compression or tension of the spring (depending on which side the body is deviated from the equilibrium position). Qualitatively, Figure 1.1 shows the result of the action of the elastic force (the greater the displacement, the greater F control).
Figure 1.1 - The position of the spring pendulum during one period of oscillation.
If the system oscillates under the action of forces developing in the oscillating system itself without external influences and without taking into account the resistance forces, then the oscillations are called undamped natural oscillations.
The absence of oscillation damping is characteristic of an ideal oscillatory system, which is physical model real physical processes.
Differential equation, corresponding to the oscillations of a spring pendulum, can be obtained from the law of its motion, which is Newton's 2nd law ma = F.
Considering that the acceleration is the second derivative of the displacement with respect to time
,
and the force acting on the body is the elastic force, determined for small displacements of the body from the equilibrium position according to Hooke's law, as we get
or
.
it second order differential equation for undamped oscillations. Its main distinguishing feature is the fact that the second derivative of the displacement with respect to time (i.e. acceleration) is proportional to the displacement. A differential equation in which the value of x is included in the zero or first power is called linear differential equation. In what follows, we will show that equations of this kind are characteristic of undamped oscillations in any ideal oscillatory system.
We transfer all the terms of the equation to the left side and bring the differential equation to the form:
Value, denote it, we get
The solution of a differential equation of this kind are the equations:
Or
These solutions are called oscillation equations, they make it possible to calculate the displacement x of a spring pendulum at any given time.
Oscillations in which the physical quantities characterizing them change according to the law of sine or cosine are called harmonic.
The difference between the arguments of the sine and cosine functions is, i.e. .
In what follows, we will most often use the solution of a differential equation in the form
In the oscillation equation:
BUT - displacement amplitude is the maximum deviation of the pendulum from the equilibrium position;
X - bias pendulum, i.e. deviation of the oscillating point (body) from the equilibrium position at time t;
– oscillation phase- the value that determines the position of the oscillating point at any time t;
α – initial phase determines the position of the pendulum at the initial time (t = 0).
Period T is the shortest time interval for which the system returns to its original position. During the period of oscillation, the system completes one complete oscillation.
Frequency periodic oscillations is called a value equal to the number of oscillations per unit of time.
Cyclic or circular frequency periodic oscillations is called a value equal to the number of oscillations performed per unit of time.
For a spring pendulum, the frequency and period of natural oscillations, depending on the parameters of the system, have the form:
, .
Knowing the displacement equation of a spring pendulum, we obtain similar equations for other physical quantities. Let's find the speed, acceleration, vibration energy, if the displacement equation of the spring pendulum is given in the form.
Speed pendulum oscillations is the first time derivative of the displacement:
Short description
Vibrations are one of the most common processes in nature and technology. High-rise buildings and high-voltage wires oscillate under the influence of the wind, the pendulum of a wound clock and a car on springs during movement, the level of the river during the year and the temperature of the human body during illness.
Mechanical vibrations…………………………………………….
Electromagnetic oscillations………………………..
Literature…………………………………………………………………..
fluctuations- These are movements or processes that repeat exactly or approximately at certain intervals of time.
Mechanical oscillations - fluctuations in mechanical quantities (displacement, speed, acceleration, pressure, etc.).
Mechanical vibrations (depending on the nature of the forces) are:
free;
forced;
self-oscillations.
Free called vibrations that occur when a single action of an external force (the initial message of energy) and in the absence of external influences on the oscillatory system.
Free (or own)- these are oscillations in the system under the action of internal forces, after the system is taken out of equilibrium (in real conditions, free oscillations are always damped).
Conditions for the occurrence of free oscillations
1. The oscillatory system must have a position of stable equilibrium.
2. When the system is taken out of equilibrium, a resultant force must arise that returns the system to its original position
3. Forces of friction (resistance) are very small.
Forced vibrations- fluctuations occurring under the influence of external forces that change over time.
Self-oscillations- undamped oscillations in the system, supported by internal energy sources in the absence of an external variable force.
The frequency and amplitude of self-oscillations is determined by the properties of the oscillatory system itself.
Self-oscillations differ from free oscillations in that the amplitude is independent of time and of the initial action that excites the process of oscillations.
Self-oscillating system consists of: oscillating system; energy source; feedback device that regulates the flow of energy from an internal energy source into an oscillatory system.
The energy coming from the source in a period is equal to the energy lost by the oscillatory system in the same time.
Mechanical vibrations are divided into:
fading;
undamped.
damped vibrations- fluctuations, the energy of which decreases with time.
Characteristics of the oscillatory movement:
permanent:
amplitude (A)
period (T)
frequency()
The greatest (in absolute value) deviation of an oscillating body from the equilibrium position is called vibration amplitude. Typically, the amplitude is denoted by the letter A.
The time interval during which the body completes one complete oscillation is called period of oscillation.
The period of oscillation is usually denoted by the letter T and in SI is measured in seconds (s).
The number of oscillations per unit time is called oscillation frequency.
The frequency is denoted by the letter v (“nu”). The unit of frequency is one oscillation per second. This unit is named hertz (Hz) in honor of the German scientist Heinrich Hertz.
the oscillation period T and the oscillation frequency v are related by the following relationship:
T=1/ or =1/T.
Cyclic (circular) frequency ω is the number of oscillations in 2π seconds
Harmonic vibrations- mechanical vibrations that occur under the action of a force proportional to the displacement and directed opposite to it. Harmonic vibrations are made according to the law of sine or cosine.
Let the material point perform harmonic oscillations.
The equation of harmonic oscillations has the form:

a - acceleration V - speed q - charge A - amplitude t - time
(or natural vibrations) are vibrations of an oscillatory system, performed only due to the initially reported energy (potential or kinetic) in the absence of external influences.
Potential or kinetic energy can be communicated, for example, in mechanical systems through an initial displacement or an initial velocity.
Freely oscillating bodies always interact with other bodies and together with them form a system of bodies called oscillatory system.
For example, a spring, a ball, and a vertical post to which the upper end of the spring is attached (see figure below) are included in an oscillatory system. Here the ball slides freely along the string (friction forces are negligible). If you take the ball to the right and leave it to itself, it will oscillate freely around the equilibrium position (point O) due to the action of the elastic force of the spring directed towards the equilibrium position.
Another classic example of a mechanical oscillatory system is the mathematical pendulum (see figure below). In this case, the ball performs free oscillations under the action of two forces: gravity and the elastic force of the thread (the Earth also enters the oscillatory system). Their resultant is directed to the equilibrium position.

The forces acting between the bodies of an oscillatory system are called internal forces. Outside forces are called the forces acting on the system from the bodies that are not included in it. From this point of view, free oscillations can be defined as oscillations in the system under the action of internal forces after the system is taken out of equilibrium.
The conditions for the occurrence of free vibrations are:
1) the emergence of a force in them that returns the system to a position of stable equilibrium after it has been taken out of this state;
2) no friction in the system.
Dynamics of free oscillations.
Vibrations of a body under the action of elastic forces. The equation of oscillatory motion of a body under the action of an elastic force F() can be obtained taking into account Newton's second law ( F = ma) and Hooke's law ( F control = -kx), where m is the mass of the ball, and is the acceleration acquired by the ball under the action of the elastic force, k- coefficient of spring stiffness, X is the displacement of the body from the equilibrium position (both equations are written in projection onto the horizontal axis Oh). Equating the right sides of these equations and taking into account that the acceleration a is the second derivative of the coordinate X(offsets), we get:
 .
.
Similarly, the expression for acceleration a we get by differentiating ( v = -v m sin ω 0 t = -v m x m cos (ω 0 t + π/2)):
a \u003d -a m cos ω 0 t,
where a m = ω 2 0 x m is the acceleration amplitude. Thus, the amplitude of the speed of harmonic oscillations is proportional to the frequency, and the acceleration amplitude is proportional to the square of the oscillation frequency.