Պտտվող հովացուցիչի դաշտային կենտրոնախույս ուժը: Պայթյուն. Իշխանի շարժիչ և կենսատեխնիկական սուզանավ
Դասական մակրոսկոպիկ էլեկտրադինամիկայի հիմնարար հավասարումները, որոնք նկարագրում են էլեկտրամագնիսական երևույթները ցանկացած միջավայրում (ներառյալ վակուումը) ստացվել են 60-ական թվականներին։ 19-րդ դար Ջ.Մաքսվելի կողմից՝ հիմնված էլեկտրական և մագնիսական երևույթների էմպիրիկ օրենքների ընդհանրացման և անգլիացի գիտնական Մ.Ֆարադեյի այն մտքի զարգացման վրա, որ էլեկտրական լիցքավորված մարմինների փոխազդեցությունն իրականացվում է էլեկտրամագնիսական դաշտի միջոցով։ (էլեկտրամագնիսական ինդուկցիայի երևույթը): Մաքսվելն առաջարկեց էլեկտրական և մագնիսական երևույթները միմյանց կապող հավասարումներ և կանխատեսեց էլեկտրամագնիսական ալիքների գոյությունը։ Մաքսվելի տեսությունը բացահայտում է լույսի էլեկտրամագնիսական բնույթը։ Մաքսվելի տեսությունը մակրոսկոպիկ է, քանի որ այն դիտարկում է դաշտերը, որոնք ստեղծված են մակրոսկոպիկ լիցքերով և հոսանքներով, որոնք կենտրոնացած են առանձին ատոմների և մոլեկուլների ծավալներից շատ ավելի մեծ ծավալներով:
Մաքսվելի էլեկտրամագնիսական դաշտի տեսությունը կապում է էլեկտրամագնիսական դաշտը բնութագրող մեծությունները նրա աղբյուրների հետ, այսինքն. տարածության մեջ էլեկտրական լիցքերի և հոսանքների բաշխում. Վեկտորները, և էլեկտրամագնիսական դաշտը շարունակական միջավայրում ենթարկվում են կապի հավասարումներ , որոնք որոշվում են շրջակա միջավայրի հատկություններով։ Այստեղ էլեկտրական դաշտի ուժգնության վեկտորն է, էլեկտրական տեղաշարժի վեկտորն է, մագնիսական ինդուկցիայի վեկտորն է, մագնիսական դաշտի ուժգնության վեկտորն է: Այս վեկտորները անշարժ էլեկտրական և մագնիսական դաշտերի համար համարվել են ավելի վաղ, օրինակ՝ ք.
Էլեկտրամագնիսական դաշտերը բավարարում են սուպերպոզիցիայի սկզբունքը, այսինքն. մի քանի աղբյուրների ամբողջական դաշտը առանձին աղբյուրների արտադրած դաշտերի վեկտորային գումարն է:
Դիտարկենք էլեկտրամագնիսական ինդուկցիայի երևույթը: Ֆարադեի օրենքից
ε մեջ = - ∂ Ֆմ /∂ տ (3.1)
հետևում է, որ մագնիսական ինդուկցիայի հոսքի ցանկացած փոփոխություն, որը միացված է շղթային, հանգեցնում է ինդուկցիայի էլեկտրաշարժիչ ուժի առաջացմանը և արդյունքում ինդուկտիվ հոսանքի առաջացմանը: Մաքսվելը ենթադրեց, որ ցանկացած փոփոխական մագնիսական դաշտ գրգռում է փոփոխական էլեկտրական դաշտը շրջապատող տարածության մեջ, որը հանդիսանում է շղթայում ինդուկցիոն հոսանքի պատճառը: Մաքսվելի գաղափարների համաձայն՝ հաղորդիչ սխեման, որում հայտնվում է էմֆ-ը, երկրորդական դեր է խաղում՝ լինելով միայն այս դաշտը հայտնաբերող ցուցիչ։
Հարց 2. Մաքսվելի առաջին հավասարումը ինտեգրալ ձևով.
Մաքսվելի առաջին հավասարումը ինդուկցիայի օրենքն է
Ֆարադեյ. Ըստ սահմանման՝ էմֆ. հավասար է էլեկտրական դաշտի ուժգնության վեկտորի շրջանառությանը.
![]() , (3.2), որը հավասար է զրոյի պոտենցիալ դաշտի համար։ Ընդհանուր դեպքում փոփոխվող հորձանուտ դաշտը համար ε մեջմենք ստանում ենք
, (3.2), որը հավասար է զրոյի պոտենցիալ դաշտի համար։ Ընդհանուր դեպքում փոփոխվող հորձանուտ դաշտը համար ε մեջմենք ստանում ենք
Արտահայտություն (3.3) - Մաքսվելի առաջին հավասարումը. էլեկտրական դաշտի ուժգնության վեկտորի շրջանառությունը կամայական փակ ուրվագծով L հավասար է մագնիսական ինդուկցիայի վեկտորի հոսքի փոփոխության արագությանը այս եզրագծով սահմանափակված մակերևույթի միջով, վերցված հակառակ նշանով: «-» նշանը համապատասխանում է ինդուկցիոն հոսանքի ուղղության Լենցի կանոնին: Այստեղից հետևում է, որ փոփոխական մագնիսական դաշտ ստեղծում է տարածության մեջ պտտվող էլեկտրական դաշտ անկախ նրանից՝ դիրիժորն այս դաշտում է (փակ հաղորդիչ միացում), թե ոչ։ Այսպիսով ստացված հավասարումը (3.3) հանդիսանում է (3.2) հավասարման ընդհանրացում, որը վավեր է միայն պոտենցիալ դաշտի համար, այսինքն. էլեկտրաստատիկ դաշտ.
Փոփոխական մագնիսական դաշտի ազդեցության տակ տարածության մեջ պտտվող էլեկտրական դաշտի առաջացումը օգտագործվում է, օրինակ, տրանսֆորմատորներում, ինչպես նաև ինդուկցիոն տիպի էլեկտրոնային արագացուցիչներում՝ բետատրոններում։
Փոփոխական մագնիսական դաշտը, որն առաջանում է տրանսֆորմատորի առաջնային ոլորուն մեջ, երբ դրա միջով փոփոխական էլեկտրական հոսանք է անցնում, նույնպես ներթափանցում է երկրորդական ոլորուն և դրանում առաջացնում է ինդուկցիայի փոփոխական էլեկտրաշարժիչ ուժ։
Փակ օղակի տեսքով վակուումային արագացնող խցիկում կոնաձև բևեռներով էլեկտրամագնիսով ստեղծված փոփոխական մագնիսական դաշտում առաջանում է պտտվող էլեկտրական դաշտ։ Պտտվող էլեկտրական դաշտի ինտենսիվության գծերն ունեն համակենտրոն շրջանակների տեսք։ Այս դեպքում բևեռի կտորների հատուկ ձևը ստեղծում է մագնիսական դաշտի շառավղային բաշխում, որի մագնիսական ինդուկցիան նվազում է առանցքից դեպի ուղեծրի ծայրամաս։ Սա ապահովում է էլեկտրոնային ուղեծրի կայունությունը: Արագացնող պալատի էլեկտրոնները շարժվում են շրջանաձև հետագծերով և արագանում են մինչև զգալի էներգիաներ կրկնվող ուղեծրային շարժման ժամանակ:
RU 2364969 արտոնագրի սեփականատերերը.
Գյուտը վերաբերում է մագնիսականության ֆիզիկային, միակողմանի իմպուլսացիոն հորձանուտային մագնիսական դաշտի ստացմանը, որը ստեղծում է մագնիսական դաշտ, որը ձգվում է շրջագծի երկայնքով՝ դրանում շարժվող ֆերոմագնիսական մարմնի նկատմամբ: Որոշակի շրջանագծի երկայնքով պտտվող մագնիսական դաշտ ստեղծելու միջոց, որը համարժեք է մագնիսական դաշտի պտույտին, այն է, որ մի քանի մշտական մագնիսներ սիմետրիկորեն տեղադրված են շրջանագծի նկատմամբ: Մշտական մագնիսների երկայնական մագնիսական առանցքները հավասարեցված են նշված շրջանագծի շոշափողներին այս շրջանագծի վրա սիմետրիկորեն տեղակայված կետերում: Մշտական մագնիսների n թիվը հայտնաբերվում է 2π/n≤ΔΘ պայմանից, որտեղ ΔΘ=arccos անկյունը, γ=d/R պարամետրը, իսկ d-ը մշտական մագնիսների երկայնական մագնիսական առանցքների հատման կետերից հեռավորությունն է։ իրենց բևեռային հարթություններով մինչև R շառավիղի նշված շրջանակը: D հաստատունների մագնիսների ուժային ֆունկցիան և γ պարամետրն ընտրված են այնպես, որ նախորդ մագնիսի կողմից ստեղծված արգելակման պահը մասամբ կամ ամբողջությամբ փոխհատուցվի հաջորդ մագնիսի արագացման պահով: հորձանուտի մագնիսական դաշտի ուղղությունը. D=µ 0 µνS 2 H 0 2 /8π 2 R 5 արժեքը, որտեղ µ 0 =1.256.10 -6 Gn/m-ը վակուումի բացարձակ մագնիսական թափանցելիությունն է, μ-ը ծավալով ֆերոմագնիսական մարմնի հարաբերական մագնիսական թափանցելիությունն է ν. , որը փոխազդում է մագնիսական դաշտի հետ, որի ուժգնությունը հավասար է H 0-ի մշտական մագնիսների բևեռների հարթության վրա՝ իրենց բևեռների խաչմերուկով S: Տեխնիկական արդյունքը բաղկացած է ֆերոմագնիսական մարմնի պտտվող շարժման ստացումից, այսինքն. ստատիկ մագնիսական-պարբերական կառուցվածքից մեխանիկական (էլեկտրական) էներգիա ստանալու մեջ։ 6 հիվանդ.
Գյուտը վերաբերում է մագնիսականության ֆիզիկային, մասնավորապես, մագնիսական դաշտի կոնֆիգուրացիա ստանալու մեթոդներին միակողմանի իմպուլսացող հորձանուտ դաշտի տեսքով, որը ստեղծում է մագնիսական դաշտ, որը ձգում է շրջագծի շուրջը՝ կապված դրանում շարժվող ֆերոմագնիսական մարմնի (էքսցենտրիկ) հետ:
Հայտնի է, որ մագնիսական դաշտի ուժգնությունը մագնիսի երկայնական առանցքի երկայնքով երկու անգամ է, քան երկայնական մագնիսական առանցքի ուղղանկյուն ուղղություններով։ Մագնիսական դաշտի ուժգնության բաշխումը ոլորտի ներսում, որի կենտրոնը համընկնում է պայտի մագնիսական բևեռների հարթության հատման կետին երկայնական մագնիսական առանցքի հետ, տրված է ուղղորդման գծապատկերով, օրինակ՝ երկայնական մագնիսական առանցքի նկատմամբ պտտվող մարմնի ձևը կարդիոիդի ուրվագծով, որը տրված է արտահայտությամբ.
որտեղ α-ն շառավղի վեկտորի շեղման անկյունն է դեպի գնդային կամայական կետ երկայնական մագնիսական առանցքի հետ համընկնող ուղղությունից: Այսպիսով, α=0-ի համար ունենք ξ(0)=1, α=π/2-ի համար՝ ξ(π/2)=0,5, որը համապատասխանում է հայտնի ֆիզիկական տվյալներին: α=π ունեցող պայտի մագնիսի համար ξ(π)=0 արժեքը։ Ուղիղ մագնիսի համար ճառագայթման օրինաչափությունը ներկայացված է պտույտի էլիպսոիդով, որի հիմնական կիսաառանցքը երկու անգամ մեծ է փոքր կիսաառանցքից և համընկնում է երկայնական մագնիսական առանցքի հետ։
Հայտնի է, որ համաժամանակյա կամ ասինխրոն փոփոխական հոսանքի շարժիչի ռոտորին ստատորից տրվող ոլորող մոմենտը պայմանավորված է պտտվող մագնիսական դաշտով, որի վեկտորը ռոտորի առանցքի համեմատ պտտվում է ժամանակի հետ կապված: Այս դեպքում նման մագնիսական դաշտը որոշում է ռոտորի հետ իր փոխազդեցության դինամիկ գործընթացը:
Գոյություն չունեն հորձանուտ մագնիսական դաշտ ստեղծելու հայտնի եղանակներ՝ սինթեզելով ստատիկ մագնիսական դաշտերը, որոնք ստեղծված են անշարժ մշտական մագնիսների ցանկացած համակցության միջոցով: Հետևաբար, հայցվող տեխնիկական լուծման անալոգները անհայտ են:
Գյուտի նպատակը հորձանուտ մագնիսական դաշտ ստեղծելու մեթոդ է, որում ֆերոմագնիսական մարմինը զգում է միակողմանի իմպուլսային ուժի գործողություն, որը նման մարմինը դնում է պտտվող շարժման, այսինքն՝ ստանում է մագնիսական դաշտի նման ստատիկ կոնֆիգուրացիա ( անշարժ մշտական մագնիսներ), որն իր ուժով համարժեք է պտտվող մագնիսական դաշտին:
Այս նպատակը ձեռք է բերվում հորձանուտի մագնիսական դաշտ ստեղծելու ենթադրյալ մեթոդով, որը բաղկացած է նրանից, որ մի քանի մշտական մագնիսներ սիմետրիկորեն տեղակայված են շրջանագծի համեմատ, մշտական մագնիսների երկայնական մագնիսական առանցքները հավասարեցված են նշված շրջանակի շոշափողներին. կետերը գտնվում են սիմետրիկորեն այս շրջանագծի վրա, և մշտական մագնիսների n թիվը հայտնաբերվում է 2π/n≤ΔΘ պայմանից, որտեղ ΔΘ=arccos անկյունը, γ=d/R պարամետրը, իսկ d-ն հեռավորությունն է կետերից: Մշտական մագնիսների երկայնական մագնիսական առանցքների հատումը իրենց բևեռային հարթությունների հետ դեպի R շառավիղի նշված շրջանակը, մշտական մագնիսների D ուժի ֆունկցիան և γ պարամետրը ընտրում են այնպես, որ նախորդ մագնիսի կողմից ստեղծված արգելակման պահը մասամբ կամ ամբողջությամբ փոխհատուցվի։ պտտվող մագնիսական դաշտի ուղղությամբ հաջորդող մագնիսի արագացման պահով և D=µ 0 µνS 2 N 0 2 /8π 2 R 5 արժեքով, որտեղ µ 0 =1.256.10 -6 H /m - բացարձակ մագնիսական վակուումի թափանցելիություն, μ - ֆերոմագնիսական մարմնի հարաբերական մագնիսական թափանցելիություն o ծավալը ν, որը փոխազդում է մագնիսական դաշտի հետ, որի ուժգնությունը հավասար է H 0-ի մշտական մագնիսների բևեռների հարթությունում՝ նրանց բևեռների S խաչմերուկով։
Հայտարարված մեթոդով գյուտի նպատակին հասնելը բացատրվում է որոշակի շրջանագծի շուրջ մագնիսական դաշտերի պարբերական կառուցվածքի իրականացմամբ՝ նույն նշանի մշտական մագնիսների երկայնական մագնիսական առանցքների ուղղությամբ այս շրջանի շոշափողներով, որում պտտվող մագնիսական դաշտը առաջանում է մշտական մագնիսների երկայնական մագնիսական առանցքների երկայնքով և միջով մագնիսական դաշտի ուժգնության տարբերության պատճառով, որը որոշվում է մագնիսական դաշտի ξ(α) ինտենսիվության ուղղորդման օրինաչափությամբ՝ համաձայն (1): Սա ապահովում է, որ ֆերոմագնիսական մարմնին հաղորդվող հորձանուտի մագնիսական դաշտի ուղղությամբ իմպուլսի պահը գերազանցի հակառակ ուղղությամբ իմպուլսի պահը:
Առաջարկվող մեթոդն իրականացնող սարքի կառուցվածքը ներկայացված է Նկ.1-ում: Ֆեռոմագնիսական մարմնի շարժման հնարավոր տարբերակները n մշտական մագնիսներից մեկի մագնիսական դաշտում ներկայացված են նկար 2-ում՝ ֆերոմագնիսական մարմնի հետ էքսցենտրիկի պտտման առանցքի վրա բեռների և շփման տարբեր արժեքների համար: Նկար 3-ը ցույց է տալիս գրաֆիկները, որոնք գործում են n մշտական մագնիսներից, որոնք քշում են էքսցենտրիկ ուժերի ֆերոմագնիսական մարմինը՝ հաշվի առնելով դրանց բաշխվածությունը շրջանագծի ներսում էքսցենտրիկի պտտման անկյան վրա: Նկար 4-ը ցույց է տալիս էքսցենտրիկ ուժի իմպուլսի կուտակման գրաֆիկը բոլոր n մշտական մագնիսների գործողությունից նրա ամբողջական պտույտներից յուրաքանչյուրի համար՝ առանց հաշվի առնելու շփման մոմենտը և կցված բեռը՝ արտահայտված որպես էքսցենտրիկում մշտապես գործող միջին ոլորող մոմենտ: Նկար 5-ում ներկայացված են հզորության գրաֆիկները՝ հորձանուտի մագնիսական դաշտի կողմից առաջացած ոլորող մոմենտից և կորուստների պահից՝ որպես էքսցենտրիկի պտտման արագության ֆունկցիա: Նկար 6-ը ցույց է տալիս փոփոխված սարքի դիագրամը, որն ապահովում է շփման կորուստների զգալի կրճատում պտտվող ռոտորի դինամիկ հավասարակշռության պատճառով պտտվող ռոտորի փոխարեն, էքսցենտրիկի փոխարեն:
Նկար 1-ում մեթոդն իրականացնող սարքը բաղկացած է.
1 - ֆերոմագնիսական մարմին m զանգվածով, ν ծավալը հարաբերական մագնիսական թափանցելիությամբ μ,
2 - R երկարությամբ լծակներ էքսցենտրիկի ֆերոմագնիսական մարմինը ամրացնելու համար,
3 - էքսցենտրիկի պտտման առանցք,
4-15 - մշտական մագնիսներ, որոնք տեղադրված են հավասարապես թեքված դեպի R շառավիղի շրջանակը և դեպի այն բևեռներից մեկը (օրինակ, հարավային բևեռները s), որի հարթության հատման կետը երկայնական մագնիսական առանցքի հետ հանվում է. նշված շրջան (ֆերոմագնիսական մարմնի պտտման հետագիծ 1) հեռավորության վրա դ.
Ֆեռոմագնիսական մարմին 1 լծակ 2-ով ցույց է տրված նկար 1-ում X առանցքի նկատմամբ β անկյունային դիրքում: C: Ներկայացված սխեմայում օգտագործվում են 12 նույնական D պարամետրով և հավասարապես թեքված մշտական մագնիսներ, որոնք սիմետրիկորեն տեղակայված են նշված շրջանակի նկատմամբ: անկյուններ ΔΘ=2π/12=30°.
Նկար 2-ում ներկայացված են ֆերոմագնիսական մարմնի 1-ի շարժման գրաֆիկները 4-15 մշտական մագնիսներից մեկի նկատմամբ շփման տարբեր պահերին և կցված բեռը պտտման առանցքում 3՝ տալով փոխազդեցության գործընթացների որակական պատկերացում:
Վերին գրաֆիկ - պտտման առանցքի վրա բեռը շատ փոքր է (գործընթացը տատանվում է մագնիսական բևեռից ֆերոմագնիսական մարմնի առավելագույն սկզբնական հեռավորությամբ, ֆերոմագնիսական մարմնի դիրքում վերջնական շեղումը գրեթե զրոյական է):
Միջին գրաֆիկ - պտտման առանցքի վրա ծանրաբեռնվածությունը մեծ է (գործընթացը պարբերական է, որը թուլանում է ֆերոմագնիսական մարմնի նվազագույն նախնական հեռավորությամբ մագնիսական բևեռից, վերջնական շեղումը դրական է, չհասնելով մագնիսական բևեռի դիրքին):
Ստորին գրաֆիկ - պտտման առանցքի վրա բեռնվածությունը օպտիմալ է (գործընթացը տատանողական-ապերիոդիկ է, որը թուլանում է տատանումների մեկ կես ցիկլով ֆերոմագնիսական մարմնի ավելի մեծ սկզբնական հեռավորության վրա մագնիսական բևեռից, քան միջին գրաֆիկի համար, վերջնական շեղում բացասական է՝ անցնելով մշտական մագնիսական բևեռի դիրքը):
Գծապատկեր 3-ը ցույց է տալիս տասներկու գծապատկերներ, որոնք սիմետրիկորեն բաշխված են էքսցենտրիկին մղող ուժերի շրջագծի շուրջ ΔΘ չափսերով համապատասխան անկյունային բացվածքներում: Կարելի է տեսնել, որ այս ֆունկցիաների մաքսիմումը զգալիորեն մեծ է նրանց նվազագույնի բացարձակ արժեքից, որը կապված է ռադիացիոն օրինաչափության կազմաձևման հետ ξ(α) մշտական մագնիսների պայտաձև պայտաձև (նկար 1-ը նկարելու հեշտության համար ցույց է տալիս մշտական ուղղանկյուն ձևի մագնիսներ): Սա, մասնավորապես, թույլ է տալիս մշտական մագնիսների n թվի համապատասխան ընտրությամբ ընտրել γ պարամետրը և D-ի արժեքը, որը որոշում է մագնիսական դաշտի ուժգնությունը H 0 մագնիսների բևեռների հարթությունում. ապահովել նախորդ մշտական մագնիսի արգելակման ուժերի մասնակի կամ ամբողջական փոխհատուցում` հետագա էքսցենտրիկից պտտվող մշտական մագնիսի ուղղությամբ արագացման ուժերով:
Նկար 4-ը ցույց է տալիս սարքում օգտագործվող բոլոր մշտական մագնիսների համատեղ գործողության գրաֆիկը, որի արդյունքում ստացվում է միջին ոլորող մոմենտ, որը մշտապես գործում է էքսցենտրիկում:
Նկար 5-ը ցույց է տալիս երկու գրաֆիկ՝ էքսցենտրիկում առաջացած օգտակար հզորության գրաֆիկը և շփման և կցված բեռի հաղթահարման համար ծախսված էներգիայի գրաֆիկը՝ որպես էքսցենտրիկի պտտման արագության ֆունկցիա: Այս գրաֆիկների հատման կետը որոշում է սարքի կայուն ռոտացիայի արագության արժեքը: Բեռի ավելացման դեպքում էներգիայի կորստի կորը մեծ անկյան տակ բարձրանում է աբսցիսայի առանցքի համեմատ, ինչը համապատասխանում է ուժային գրաֆիկների նշված խաչմերուկի կետի տեղափոխմանը դեպի ձախ, այսինքն՝ հանգեցնում է կայունության նվազմանը։ - էքսցենտրիկի պտտման արագության N SET արժեքը:
Նկար 6-ը ցույց է տալիս սարքի իրականացման հնարավոր սխեմաներից մեկը, որում ռոտորը պատրաստված է դինամիկ հավասարակշռված կառուցվածքի տեսքով, օրինակ՝ հիմնված երեք ֆերոմագնիսական մարմինների վրա, որոնք տեղակայված են 120° անկյուններում R-ից հավասար հեռավորությունների վրա: պտտման առանցք և ունենալով նույն զանգվածը, որը չի առաջանում, երբ ռոտորը պտտվում է, թրթռման բեռը պտտման առանցքի վրա, ինչպես 1-ին նկարում էքսցենտրիկի դեպքում, կենտրոնաձիգ ուժերի ազդեցությամբ (վերջինս նման. ռոտորը հավասարակշռում է միմյանց): Բացի այդ, ֆերոմագնիսական մարմինների քանակի ավելացումը հանգեցնում է սարքի օգտակար հզորության ավելացմանը՝ նման ֆերոմագնիսական մարմինների թվի համամասնությամբ։ Այս գծագրում օգտագործված մշտական մագնիսների թիվը կրճատվել է՝ գծագիրը պարզեցնելու համար: Փաստորեն այս թիվը ընտրվում է n=hr+1 բանաձեւով, որտեղ h-ը ռոտորում գտնվող ֆերոմագնիսական մարմինների թիվն է, p=0, 1, 2, 3, ... ամբողջ թիվ է, որը պարզ կդառնա. հետևյալ նկարագրությունից.
Դիտարկենք առաջարկվող մեթոդի գործառնական էությունը՝ դիտարկելով այն իրականացնող սարքի գործողությունը՝ ցուցադրված Նկ.1-ում:
Հաշվի առնելով H(α) մագնիսական դաշտի ուժգնության ξ(α) ձևը, կարելի է հասկանալ, որ AO գծի հատման կետից R շառավղով շրջանով մինչև սրան հավասար հեռավորությունների վրա. կետում և դրանից հետո մագնիսական դաշտի ուժգնությունը տարբեր կլինի, այն է՝ մինչև այս կետը ֆերոմագնիսական մարմնի պտույտի երկայնքով մագնիսական դաշտի ուժգնությունն ավելի մեծ է, քան այս կետից հետո։ Հետևաբար, դիտարկվող մագնիսի գրավիչ ուժը ավելի մեծ կլինի, քան արգելակման ուժը, ինչպես երևում է նկար 3-ից n մշտական մագնիսներից յուրաքանչյուրի համար: Սա հանգեցնում է էքսցենտրիկի պտտման ժամանակ անկյունային իմպուլսի կուտակմանը և վերջին պտտման շարժման անորոշ ժամանակով հաղորդակցմանը, եթե ստացված ոլորող մոմենտը (նկար 4) գերազանցում է շփման պահը (և կցված բեռը):
Դիտարկենք, մասնավորապես, ֆերոմագնիսական մարմնի փոխազդեցությունը 1 մշտական մագնիսով 5 (նկ. 1): Այս մշտական մագնիսը գտնվում է այնպես, որ նրա երկայնական մագնիսական առանցքը B կետում համընկնում է R շառավղով շրջանագծի AB շոշափման հետ: A կետը գտնվում է մագնիսական բևեռի հարթության վրա և հանդիսանում է այս հարթության հատման կետը երկայնական մագնիսական առանցքի հետ: ԱԲ. Հեռավորությունը OA=R+d, այսինքն՝ A կետը գտնվում է այս շրջանից d հեռավորության վրա, ինչպես նշված է մշտական մագնիսի 7-ի համար: Նշելով γ=d/R հարաբերակցությունը γ անչափ պարամետրի միջոցով՝ AB հատվածի արժեքը հավասար է. հայտնաբերվել է r 0 =AB= R(2γ+γ 2) 1/2 արտահայտությունից։ ΔΘ=2π/n անկյունը որոշում է այս շրջանագծի նկատմամբ մշտական մագնիսների դասավորության անկյունային միջակայքը, իսկ համապատասխան մշտական մագնիսի՝ կոորդինատային համակարգի X առանցքից հաշված անկյունային դիրքը հավասար է Θ i = 2πi/n, որտեղ i=1, 2, 3, ... 12. Ֆեռոմագնիսական մարմնի 1-ի ակնթարթային անկյունային դիրքը լծակ 2-ով կնշանակվի β-ով, իսկ B կետի անկյունային դիրքը շրջանագծի վրա՝ հարաբերական. X առանցքը կնշանակվի β 0i (մշտական մագնիս 5-ի համար B կետը գտնվում է X առանցքի վրա, հետևաբար β անկյունը 01 =0): Մշտական մագնիսի համար 6 անկյունը β 02 =ΔΘ, մշտական մագնիսի համար 7 β 03 =2ΔΘ, և այլն, իսկ մշտական մագնիսների համար՝ 4 β 012 =11ΔΘ։ β 0i և Θ i անկյունները միմյանց հետ կապված են Θ i -β 0i =arccos հաստատուն տարբերությամբ: Պարզ փոխակերպումների միջոցով ֆերոմագնիսական մարմնի կենտրոնից մինչև մշտական մագնիս 5-ի բևեռի A կետի հեռավորությունը (ընդհանուր դեպքում i-րդ մշտական մագնիսի համար) հայտնաբերվում է արտահայտությունից.
0≤β≤2π միջակայքի համար: Մշտական մագնիս 5-ի համար Θ 1 արժեքը ընտրվում է որպես ΔΘ: Մշտական մագնիս 5-ի AB երկայնական մագնիսական առանցքի α անկյունը և ֆերոմագնիսական մարմնի կենտրոնի 1-ի կենտրոնի և A կետի միջև գծի միջև հայտնաբերվում է արտահայտությունից.
հաշվի առնելով α=arcos Q հակադարձ եռանկյունաչափական ֆունկցիան: Նկատի ունեցեք, որ նկար 1-ում α>π/2 անկյունը, այսինքն՝ ֆերոմագնիսական մարմինը գտնվում է մշտական մագնիս 5-ի հետաձգող մագնիսական դաշտում և արագացող մագնիսական դաշտում: մշտական մագնիս 6.
(3)-ից հայտնաբերված α արժեքը փոխարինելով (1) արտահայտությամբ՝ մենք ստանում ենք ξ(α) դիագրամի կապը.
Մագնիսական դաշտի ուժգնությունը այն կետում, որտեղ գտնվում է ֆերոմագնիսական մարմինը մագնիսական բևեռի նկատմամբ, որոշվում է r(β) հեռավորությամբ՝ համաձայն (2) և, հաշվի առնելով (4)՝ հավասար է.
և մշտական մագնիսով ֆերոմագնիսական մարմնի ձգողական ուժը F M (β) սահմանվում է հետևյալ կերպ.
որտեղ D=µ 0 µνS 2 Н 0 2 /8π 2 R 5, ինչպես նշված է վերևում:
F M (β) մագնիսական ուժի վեկտորը, որը նախագծված է էքսցենտրիկի լծակի ուղղանկյունի վրա, որոշում է էքսցենտրիկ F M DV (β) մագնիսական շարժիչ ուժը, որը սահմանվում է հետևյալ կերպ.
և որը որոշում է ոլորող մոմենտ M(β)=F M DV (β)R, որի միջին արժեքը M CP է, որը որոշվում է F M DV (β) ուժերի 0≤β≤2π ինտերվալի ինտեգրմամբ բոլոր n մշտական մագնիսների համար: , որի ձևը ցույց է տրված նկար 3-ում, պատկերված է 4-ում՝ հաշվի չառնելով շփման պահը և կցված բեռի պահը։
Օգտակար հզորություն P BP =M SR ω, որտեղ ω-ն էքսցենտրիկի պտտման անկյունային արագությունն է. դրա գրաֆիկը նշված է նկ.5-ում թեք ուղիղ գծի տեսքով: Ինչպես հայտնի է, շփման ուժը (կցված բեռը) համաչափ է էքսցենտրիկի պտտման արագությանը, ուստի ուժի կորուստը ներկայացված է պարաբոլիկ կորով Նկ.5-ում: Էքսցենտրիկ N=ω/2π [rev/s]-ի պտտման արագությունը մեծանում է մինչև N սահմանված արժեք, որի դեպքում շփման կորուստների օգտակար հզորությունը և հզորությունը և միացված բեռը հավասար են միմյանց։ Սա գրաֆիկորեն արտացոլված է նկար 5-ում թեք գծի պարաբոլայի հետ հատման կետով: Հետևաբար, պարապ ռեժիմում (այսինքն՝ պտտման առանցքում միայն շփման ազդեցության տակ), էքսցենտրիկի անկյունային արագությունը առավելագույնն է և նվազում է, երբ արտաքին բեռը կցվում է պտտման առանցքին, ինչպես բնորոշ է. օրինակ՝ DC շարժիչների համար՝ սերիական ներառմամբ:
Առաջարկվող մեթոդն իրագործող սարքի շահագործումը հիմնված է մագնիտոպերիոդիկ կառուցվածքի կազմակերպման վրա՝ մշտական մագնիսների (կամ էլեկտրամագնիսների) երկայնական մագնիսական առանցքների կողմնորոշմամբ նույն բևեռներից շոշափողների երկայնքով դեպի շրջան, որը հանդիսանում է հետագիծը։ ֆերոմագնիսական մարմնի պտտվող շարժումը, մինչդեռ պտտվող մագնիսական դաշտը, որը ձգում է ֆերոմագնիսական մարմինը շրջագծի երկայնքով մեկ ուղղությամբ, առաջանում է մագնիսական դաշտի ավելցուկի պատճառով երկայնական մագնիսական առանցքի ուղղությամբ այլ անկյունային ուղղությունների նկատմամբ, որը որոշվում է ճառագայթման օրինակով ξ(α)՝ համաձայն (1) և (4) արտահայտությունների։
Պտտվող մագնիսական դաշտին համապատասխան պտտվող մագնիսական դաշտի ձևավորման գործընթացները հասկանալու համար զուտ ստատիկ կառուցվածքում անհրաժեշտ է ցույց տալ, որ ֆերոմագնիսական մարմինը կարող է շարժման մեջ դրվել թեք տեղադրված մշտական մագնիսով, որպեսզի կախված. ֆերոմագնիսական մարմնի վրա ազդող շփման ուժի մեծության վրա այն կշարժվի կամ տատանողական խոնավ շարժումով կանգնեցնելով այն մշտական մագնիսի բևեռի մոտ՝ այս կամ այն նշանի գրեթե զրոյական տեղաշարժով մշտական մագնիսի A կետի նկատմամբ ( ինչպես Նկ.1-ում 5-րդ մագնիսը), կամ այն կդադարեցվի AO գծից առաջ կամ հետո, ինչպես ցույց է տրված Նկ.2-ի միջին և ստորին դիագրամներում: Զգալի քանակությամբ շփման դեպքում ֆերոմագնիսական մարմինը կկանգնի մինչև AO գծին հասնելը (դրական մնացորդային տեղաշարժ): Այս հանգամանքը հեշտությամբ բացատրվում է նրանով, որ ըստ (7) արտահայտության էքսցենտրիկին մղող ուժը համաչափ է cos(α+β-β 0i-ին), որի փաստարկը, երբ ֆերոմագնիսական մարմինը գտնվում է ճիշտ A կետի հակառակ կողմում, հավասար է π/2, քանի որ β=β 0i և α=π /2, այսինքն՝ ֆերոմագնիսական մարմնի կենտրոնի AO գծի հետ ճշգրիտ համընկնումով, շարժիչ մագնիսական ուժը F M DV (β) հավասար է զրոյի։ , իսկ ֆերոմագնիսական մարմինը շփման առկայության դեպքում երբեք չի կարող դիրք գրավել AO գծի վրա՝ չհաշված նրա շարժման գործոնը իներցիայով։ Սա ցույց է տրված Նկ.2-ի միջին դիագրամում: Եթե շփումը ընտրվում է որպես օպտիմալ, ապա ֆերոմագնիսական մարմինը ձգվում է մշտական մագնիսի կողմից ավելի ինտենսիվ, քան արգելակվում է դրանով, ուստի ֆերոմագնիսական մարմնի կենտրոնը իներցիայով կհատի AO գիծը, ինչպես ցածր տատանվող ռեժիմում: շփում, և կանգ առեք AO գծի հետևում (բացասական մնացորդային տեղաշարժ), որը նշված է Նկ.2-ի ներքևի գծապատկերում:
Այս փաստարկները բխում էին նրանից, որ ֆերոմագնիսական մարմինը գտնվում էր հանգստի վիճակում կամ աննշանորեն դանդաղ պտույտով։ Հետևաբար, շատ ցածր շփման դեպքում (ժամանակակից առանցքակալներում շփման գործակիցը կարող է ունենալ ≥0,0005 արժեք), մագնիսի բևեռի և ֆերոմագնիսական մարմնի միջև հեռավորությունը, որի դեպքում մագնիսը սկսում է շարժման մեջ դնել ֆերոմագնիսական մարմինը, բավականին մեծ է։ (Նկար 2-ում վերին դիագրամի համար այս հեռավորությունը հարաբերական առումով հավասար է մեկին): Բարձր շփման դեպքում նշված հեռավորությունը նվազագույն է (նկար 2-ի միջին գծապատկերում այն հավասար է 0,25-ի), իսկ օպտիմալ շփման դեպքում այդ հեռավորությունը մեծ է նշված նվազագույնից, բայց առավելագույնից փոքր է (նկ. 2-ի ստորին դիագրամում): այն հավասար է 0,75-ի): Վերջինս նշանակում է, որ նման օպտիմալ շփման դեպքում ֆերոմագնիսական մարմինը ստանում է բավարար արագացում և իներցիայով գերազանցում է AO գիծը, ինչպես ցածր շփումով տատանողական շարժման դեպքում, բայց տատանումների կես շրջանից հետո այն դադարում է՝ զգալիորեն պակաս լինելով AO գծից: Այս դեպքում ֆերոմագնիսական մարմինը կկանգնի և կշարունակի մնալ հանգստի վիճակում, եթե դրա վրա չազդի հաջորդ մշտական մագնիս 6-ի արագացող մագնիսական դաշտը (նկար 1): Քանի որ սարքը շահագործման հանձնելը ներառում է մեկ հաղորդագրություն դեպի արտաքին իմպուլսի էքսցենտրիկին, այն է՝ ստիպել նրան պտտվող շարժման, ապա օպտիմալ շփման դեպքում էքսցենտրիկը շարժվում է իներցիայով՝ ամեն անգամ ստանալով մշտական մագնիսների հաջորդականությունը, որոնք միակողմանիորեն ազդող (ինտեգրալ մեկնաբանության մեջ) իմպուլսների պահերին են, որն ապահովում է էքսցենտրիկի շարժումը առաջացող հորձանուտի մագնիսական դաշտում անորոշ ժամանակով:
Այսպիսով, գտնվելով AO գծի հետևում, ֆերոմագնիսական մարմինը զգում է հաջորդ մշտական մագնիսի 6-ի ձգումը պտտման ուղղությամբ և շարունակում է իր շարժումը դեպի այն, այնուհետև դեպի մշտական մագնիս 7 և այլն։ կլոր. Մշտական մագնիսների համակարգը կառուցված է այնպես, որ նախորդ մշտական մագնիսի դանդաղող մագնիսական դաշտը մասամբ կամ ամբողջությամբ ճնշվի հաջորդ մշտական մագնիսի արագացող մագնիսական դաշտով: Սա ձեռք է բերվում՝ ընտրելով մշտական մագնիսների n թիվը և γ հաստատուն պարամետրը, ինչպես նաև մշտական մագնիսների ձևավորումը, որը որոշվում է D հաստատունով: Նկար 3-ում մագնիսական շարժիչ ուժերը F M DV (β) բաշխված են անկյունների միջակայքը 2π այնպես, որ արգելակման ուժերի ամբողջական փոխհատուցում չկա արագացման ուժերի կողմից, թեև վերջիններիս առավելագույնը մոտավորապես երեք անգամ մեծ է արգելակման մինիմումի մոդուլներից (և ոչ երկու անգամ, ինչը ցույց է տալիս նշված մասնակի փոխհատուցումը) . Եթե ավելացնեք մշտական մագնիսների թիվը n, օրինակ, մեծացնելով R շառավիղը կամ նվազեցնելով d բացը (այսինքն՝ նվազեցնելով γ), կարող եք զգալիորեն թուլացնել արգելակման գործոնի ազդեցությունը և բարձրացնել սարքի օգտակար հզորությունը։
Երբ ֆերոմագնիսական մարմինը շարժվում է մշտական մագնիսների խմբի համեմատ, պտտման վիճակը սնվում է նույն նշանի պտտվող իմպուլսներով փակ հետագծի (շրջանի) երկայնքով տեղակայված մշտական մագնիսների հաջորդականության կողմից, ինչը հանգեցնում է շարունակական պտտվող շարժման: ֆերոմագնիսական մարմնի. Ինչպես նշվեց վերևում, սարքը գործարկվում է մեկ արտաքին գործողությամբ՝ տվյալ սկզբնական անկյունային արագությամբ: Անշարժ վիճակից սարքը չի կարող ինքնաբուխ անցնել պտտվող շարժման ռեժիմին, որը բնութագրում է այս սարքը որպես կոշտ ինքնագրգռման ռեժիմով գեներատոր:
Տասներկու մշտական մագնիսներից (n=12) սարքի համապատասխան հաշվարկը՝ դրանց բևեռների խաչմերուկով S=8.5.10 -4 մ 2, ֆերոմագնիսական մարմնի քաշը՝ m=0.8 կգ, մարմնի ծավալը ν=10 -4 մ 3. և հարաբերական մագնիսական թափանցելիությամբ μ=2200, R=0.2 մ երկարությամբ լծակի երկարությամբ և d=0.03 մ բացվածքով (γ=0.15) պատրաստվել է Microsoft Excel ծրագրի միջոցով H 0 բևեռներում մագնիսական դաշտի ուժգնությամբ մշտական մագնիսներ ընտրելիս։ =1 կԱ/մ D=10 -4 ն արժեքի համար: Այս հաշվարկների արդյունքները ներկայացված են 3-րդ, 4-րդ և 5-րդ նկարների գրաֆիկներում՝ քանակական առումով:
Էքսցենտրիկի տեսքով ռոտորով սարքի թերությունը նրա զգալի թրթռման առկայությունն է։ Այն վերացնելու համար պետք է օգտագործվեն դինամիկ հավասարակշռված ռոտորներ մի քանի (h) սիմետրիկ տեղակայված ֆերոմագնիսական մարմիններից, ինչպես սխեմատիկորեն ցույց է տրված Նկ.6-ում: Բացի այդ, դա հանգեցնում է սարքի ելքային (օգտակար) հզորության h-ի ավելացմանը: Նախկինում անդրադարձ էր կատարվել այն փաստին, որ նման սարքում մշտական մագնիսների թիվը n պետք է հավասար լինի n=ph+1-ի։ Այսպիսով, h=3-ի համար n թիվը կարող է հավասար լինել n=4, 7, 10, 13, 16 և այլն թվերին։ Սա թույլ է տալիս զգալիորեն նվազեցնել թրթռումները ռոտորի կողմից ստացված ուժային իմպուլսներից: Բացի այդ, ինդուկտորները կարող են պատրաստվել ֆերոմագնիսական մարմինների ներսում, որոնցում առաջանում են emfs: ֆերոմագնիսական մարմինների պարբերական մագնիսացման և ապամագնիսացման պատճառով, երբ դրանք շարժվում են մագնիսական համակարգի համեմատ: Հետաքրքիր է, որ այս emfs. ունեն տատանումների հաճախականություն f=Nn և պարզվում է, որ միմյանցից 120°-ով շեղված են, ինչպես եռաֆազ գեներատորում: Սա կարող է օգտագործվել ցածր հոսանքի էներգիայի ճարտարագիտության մեջ որպես մոդուլ, որն առաջացնում է եռաֆազ փոփոխական հոսանք՝ ավելացված հաճախականությամբ (400 ... 1000 Հց հաճախականությամբ), օրինակ՝ ինքնավար տիեզերական թռիչքի ժամանակ գիրոսկոպների սնուցման համար: Ֆեռոմագնիսական մարմինների ինդուկտորներից եռաֆազ հոսանքի ելքը իրականացվում է կոնտակտային խոզանակներով հագեցած մեկուսացված օղակաձև էլեկտրոդների միջոցով:
Ի վերջո, պետք է նշել, որ մշտական մագնիսների n թվի աճով, այնպես, որ ΔΘ>2π/n, ինչպես նշված է պնդումներում (նկ.1-ում ΔΘ=2π/n), γ պարամետրի համապատասխան աճով. , r 0 հատվածի երկարությունը մեծանում է, և ֆերոմագնիսական մարմնի ներգրավման գոտիները համընկնում են հարակից մշտական մագնիսներով, ինչը հնարավորություն է տալիս չեզոքացնել արգելակման գոտիների ազդեցությունը և բարձրացնել սարքի հզորությունը:
Ստատիկ սարքից պտտվող մագնիսական դաշտ ստանալու երևույթը և առանց օգտագործվող մշտական մագնիսների մագնիսական հատկությունները կորցնելու հակասում է «perpetum mobile» ստեղծելու անհնարինության մասին առկա պատկերացումներին, հետևաբար, մագնիսական խնդիրներով զբաղվող տեսական ֆիզիկոսներին անհրաժեշտ կլինի. գտնել այս երեւույթի բացատրությունը: Նմանատիպ երևույթներ հաստատվել են հեղինակի կողմից, երբ ուսումնասիրել է ֆերոմագնիսական օղակների շարժումը պարբերական մագնիսական կառույցներում հագեցած մագնիսական դաշտերով՝ օգտագործելով ֆերոմագնիսների մագնիսական մածուցիկության հայտնի հատկությունը, ինչպես նաև հագեցված մագնիսական դաշտերում ֆերոմագնիսների հարաբերական մագնիսական թափանցելիությունը նվազեցնելու հատկությունը։ (Ա.Գ. Ստոլետովի կորը, 1872) .
Առաջարկվող մեթոդը կիրառող սարքի հաստատումը պետք է վստահվի MEPhI-ին (Մոսկվա) կամ Ռուսաստանի գիտությունների ակադեմիայի ինստիտուտին՝ կապված մագնիսականության և էներգիայի կիրառական խնդիրների հետ: Պետք է խրախուսել գյուտի արտոնագրումը հիմնական զարգացած երկրներում։
գրականություն
1. Էբերտ Գ., Համառոտ տեղեկատու ֆիզիկայի մասին, թարգմ. դրա հետ., խմբ. Կ.Պ. Յակովլևա, խմբ. 2-րդ, GIFML, M., 1963, էջ 420:
2. O.F. Men’shikh, Ferromagnetic thermodynamic effect. Առաջնահերթությամբ բացման հայտ 23.07.2007թ., Մ., IAANO.
3. O. F. Men'shikh, Magnetic viscous ճոճանակ, ՌԴ արտոնագիր No 2291546 2005 թվականի ապրիլի 20-ի առաջնահերթությամբ, Հրատար. ցուլի մեջ. թիվ 1 10.01.2007թ.
4. O.F. Men’shikh, Ferromagnetic viscous rotator, RF Patent No. 2309527 with priority date 11 May 2005, Publ. ցուլի մեջ. Թիվ 30 27.10.2007թ.
5. O. F. Men’shikh, Magnetic viscous rotator, RF Patent No 2325754 with priority date 02.10.2006, Publ. ցուլի մեջ. Թիվ 15 27.05.2008թ.
Պտտվող մագնիսական դաշտ ստեղծելու մեթոդ, որը բաղկացած է նրանից, որ մի քանի մշտական մագնիսներ սիմետրիկորեն տեղակայված են շրջանագծի նկատմամբ, մշտական մագնիսների երկայնական մագնիսական առանցքները հավասարեցված են նշված շրջանագծի շոշափողներին այս շրջանի վրա սիմետրիկորեն տեղակայված կետերում. իսկ մշտական մագնիսների n թիվը հայտնաբերվում է 2π / n ≤ΔΘ պայմանից, որտեղ անկյունը
ΔΘ=arccos, պարամետր γ=d/R, a d-ն մշտական մագնիսների երկայնական մագնիսական առանցքների հատման կետերից իրենց բևեռային հարթություններով մինչև R շառավիղի նշված շրջանագիծը, մշտական մագնիսների ուժի ֆունկցիան D և. γ պարամետրն ընտրվում է այնպես, որ նախորդ մշտական մագնիսի կողմից առաջացած արգելակման ոլորող մոմենտը մասամբ կամ ամբողջությամբ փոխհատուցվի հաջորդ մշտական մագնիսի արագացման մոմենտով պտտվող մագնիսական դաշտի ուղղությամբ, և D=µ 0 µνS 2 H արժեքը: 0 2 /8π 2 R 5, որտեղ µ 0 =1,256 10 -6 H/m բացարձակ մագնիսական թափանցելիության վակուումն է, μ-ը ծավալի ν ֆեռոմագնիսական մարմնի հարաբերական մագնիսական թափանցելիությունն է, որը փոխազդում է մագնիսական դաշտի հետ, որի ուժգնությունը H է: o մշտական մագնիսների բևեռների հարթությունում՝ դրանց բևեռների խաչմերուկով Ս.
Գյուտը վերաբերում է մագնիսականության ֆիզիկային՝ միակողմանի իմպուլսացիոն պտտվող մագնիսական դաշտի ստացմանը, որը ստեղծում է մագնիսական դաշտ, որը ձգում է շրջագծի շուրջը՝ դրանում շարժվող ֆերոմագնիսական մարմնի նկատմամբ։
Բոգոմոլով Վ.Ի.
«Գարնանային ապրանքներ 2011» նշումների ընտրանի
Առաջաբան
Ձմեռը անցավ, ամառը եկավ - շնորհակալություն կուսակցությանը դրա համար:
Վերջին 15 տարիների ընթացքում ես առաջ եմ քաշում երկրորդ տեսակի հավերժ շարժման մեքենաների նախագծման հիմնարար հնարավորության գաղափարը, այսինքն՝ բնական ուժերի աշխատանքի ազատ էներգիայի ապարատային օգտագործման իրական հնարավորությունը։ մարդկային միջավայրը սպառողի կարիքների համար:
Ի՞նչ բնական ուժերի մասին է խոսքը։ Ես մասնագիտացած եմ մարդու կողմից գրավիտացիոն ուժերի, իներցիայի կենտրոնախույս ուժերի և «վերադարձող» Արքիմեդյան ուժերի ազատ աշխատանքի հնարավորության ուսումնասիրության մեջ, ձգողականության դաշտերում, կենտրոնախույս ուժային դաշտերում, մագնիսական դաշտերում և էլեկտրաստատիկ ուժերի դաշտերում:
Ո՞րն է իմ անսահման ոգևորության և երկար տարիների համառության աղբյուրը: Ես հավատում եմ, որ բնության մեջ մեզ հայտնի բոլոր ուժերը բնական «մեքենաների» աշխատանքի արդյունք են, մեխանիզմների աշխատանքի։, բնության կողմից կառուցված մեկ համընդհանուր սկզբունքով. Մասնավորապես, շրջակա միջավայրում էներգիայի շարունակական փոխանակման սկզբունքը, որպես ամբողջության օպտիմալ էներգիայի հաշվեկշռի «ավտոմատ» վերականգնման միջոց, պարամետրի տեղային խախտման դեպքում: էներգիայի խտությունը ծավալով» պահպանողական ուժերի պոտենցիալ էներգիայի բոլոր հայտնի դաշտերի էներգիայի խտության ճառագայթային գրադիենտներում:
Պոստուլատ «Այս սխեմայի համաձայն, բոլոր բնական ուժերը առաջանում և իրացվում են շրջակա միջավայրի բնական մեքենաներում»: Նման սխեմայի առանձնահատկությունները որոշում են նման բնական մեքենաների աշխատանքի հզորությունը կոնկրետ իրավիճակներում և որոշում են մեր կարողությունը՝ օգտագործելու ազատ էներգիայի մի մասը ապարատում: այդպիսին բնական էներգիայի փոխանակման գործընթաց պահպանողական ուժերի անհատույց աշխատանքի ֆիզիկական ազդեցությունների միջոցով:
Այսպիսով, իմ ոգևորության և հաստատակամության աղբյուրը այն համոզմունքն է, որ «հավերժ շարժման մեքենաների» գյուտարարի գիտելիքը բնական մեքենաների կառուցվածքի և սկզբունքի համընդհանուր սխեմայի մասին, որոնք առաջացնում են փոխազդեցությունների տեսակների հայտնի ուժեր, թույլ կտան նրան. նախագծել սարքեր և արհեստականորեն իրականացնել էներգիայի հոսքերի վերաբաշխման արհեստական գործընթացներ բաց արհեստական համակարգերի միջոցով, որոնք օրգանապես, առանց բնության նկատմամբ բռնության, կտեղավորվեն համընդհանուր էներգիայի փոխանակման համակարգում։
Այս գարնանը ես վերոհիշյալ պոստուլատի նոր մեկնաբանություններ ունեմ՝ իմ վարկածն ապացուցելու համար իմ ենթադրյալ փորձարարական կայանքների նոր սխեմաների տեսքով՝ «կարևոր փորձերի» համար։.
Էլ ինչի՞ մասին է պատմում հաղորդակցվող անոթների օրենքը։
Հազարամյա արտադրական պրակտիկայի ընթացքում մարդկությունը հավաստիորեն հաստատել է հետևյալ ճշմարտությունը. «հաղորդակցող անոթների» բնության օրենքը անվիճելի փաստ է:
Էլ ի՞նչ բնական օրենքներ-ճշմարտությունների մասին կարող է մեզ պատմել բանականության տրամաբանությունը։ ելնելով հաղորդակցվող անոթների օրենքի բնույթով անփոփոխ կատարման ճշմարտությունից։
Դիտարկենք հաղորդակցվող անոթների օրենքի բնական ուժերի գործողության 1-ա, 1-բ, 1-գ սխեմաները:
Նկար 1-ա-ն ցույց է տալիս հաղորդակցվող անոթների օրենքի տարբերակը, որտեղ մոլորակի օվկիանոսային տարածքը համարվում է վերջինը: 1-b և 1-c նկարները ցույց են տալիս «Արքիմեդյան լծակների» օրենքի տարբերակը հիդրավլիկ մնացորդների օրինակների վրա՝ հաղորդակցվող անոթներ և լծակային մնացորդներ:
Ի՞նչ եզրակացությունների կարող ենք գալ՝ դիտարկելով և համեմատելով այս սխեմաները։
Անկախ համաշխարհային օվկիանոսի մակերևույթի մակարդակի ցանկացած ձևով առաջացող տատանումներից (տարբեր ուժերի ազդեցությամբ՝ կլիմայական, կենտրոնախույս, նավի շարժումներ և այլն), մոլորակի գրավիտացիոն ուժերի աշխատանքի ազդեցությունը, ի վերջո, միշտ. որոշում է օվկիանոսում ջրի զանգվածի միջին հաստատուն մակարդակը, որը համապատասխանում է ոլորտի սպեկուլյատիվորեն ընդունված պոտենցիալ հավասարազոր մակերեսի շառավիղի արժեքին, ինչպես. նշեք հղման համակարգումնյութի հավասար զանգվածների վրա հավասար մոլորակային գրավիտացիոն ուժերի գործողության մեծության մասին։
Ծագում է օվկիանոսում ջրի մակարդակի ցանկությունը՝ կայուն հավասարակշռության դիրք գրավել տեղեկատու համակարգի պոտենցիալ մակերևույթի նույն շառավղով։ հավասար հակադիր ՈՒԺԵՐԻ ԱՇԽԱՏԱՆՔՆԵՐԻ հավասարության արդյունքումձգողականությունը օվկիանոսի ջրի «հաղորդակցող անոթներում» հեղուկ նյութի գրավիտացիոն զանգվածների վրա։
Նմանատիպ եզրահանգում կարող ենք անել մոլորակի ձգողության արդյունքում առաջացած ուժերի ԿԱՏԱՐՎԱԾ ԱԶԱՏ ԱՇԽԱՏԱՆՔԻ հաստատուն և շարունակական հավասարության մասին՝ քաշային-հիդրավլիկ և լծակ մնացորդների հավասար զանգվածների վրա, կարող ենք անել՝ հաշվի առնելով լծակների ցանկությունը. կայուն հավասարակշռության դիրք այս հղման համակարգի պոտենցիալ հավասարաչափ մակերեսի նույն շառավղով:
«Գնդաձև» պոտենցիալ հավասարաչափ մակերեսի որոշակի շառավիղը համապատասխանում է որոշակի պարամետրի «Էներգիայի խտությունն ըստ ծավալի»ձգողության ուժերի շարունակական հավերժական ԱՇԽԱՏԱՆՔԻ գործընթացում, ներառյալ նրանց աշխատանքը հիդրոստատիկ ճնշման ուժերի գրադիենտի ստեղծման և պահպանման շարունակական գործընթացի վրա, օրինակ, մոլորակի վրա հեղուկում:
«Էներգիայի խտություն» հասկացությունը՝ էներգիայի խտություն, որպես մոլորակի նյութի կառուցվածքի հատուկ ծավալային էներգիա, ես վերցրել եմ Վ. .
Դիտարկենք 2-ա և 2-բ նկարներում Արքիմեդի օրենքի բնական ուժերի գործողության սխեմաները, արքիմեդյան բարձրացնող ուժերը, որոնք գործում են բոցի վրա և համեմատել դրանք 1-a և 1-b սխեմաների հետ:
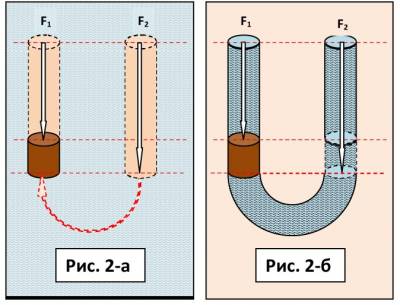
Հավասար պոտենցիալ մակերևույթների սահմանները գծվում են սպեկուլյատիվ (տեղեկատու համակարգ) լողի ստորին և վերին մակերևույթների միջով, որոնք համապատասխանում են մոլորակի գրավիտացիոն ուժերի գործողության շառավիղ-վեկտորներին լողի և հեղուկի զանգվածների վրա։
Արքիմեդյան ուժը արդյունքի ուժն էՖԱ կրկնակի ճնշման ուժ, ներքեւՖ 2 բոցի հիմքի վրա և վերևումՖ 1 դեպի բոց մակերեսին:Ֆ A= Ֆ 2 – Ֆ 1 .Ճնշման ուժ Ֆ 1 և Ֆ 2 յուրաքանչյուրը համաչափ է հեղուկի քաշին, այսինքն՝ գրավիտացիոն ուժերի ԱՇԽԱՏԱՆՔԻՆ (Ֆգր ) «յուրաքանչյուրն իր սյունակի համար» հեղուկ. «Սյուներ» ասելով հասկանում ենք նկարներում ներկայացված հիդրոստատիկ ճնշման ուժերի սյուները։
Ի՞նչ եզրակացությունների կարող ենք գալ՝ համեմատելով 1-a, 1-b և 2-a, 2-b սխեմաները:
Նկար 2-բ-ում U-ում -ձևավորված հաղորդակցվող անոթ, Արքիմեդի օրենքը կատարվում է խստորեն համաձայն Նկար 2-ա-ում ցուցադրված բարձրացնող Արքիմեդյան ուժերի գործողության մեխանիզմի սխեմայի, երբ հեղուկ զանգվածի «սյուները» ճշգրիտ մակագրված են հզորության մեջ: հաղորդակցվող անոթների ձախ և աջ ճյուղերը: Սխեման 2-արույրը համարվում է հիդրավլիկ մնացորդների 1-b սխեմայի անալոգը և ցույց է տալիս լիարժեք համապատասխանություն «հաղորդակցող անոթներ» և «արքիմեդյան ուժեր բարձրացնող» բնական ֆիզիկական էֆեկտների իրականացման մեխանիզմներին:
Արքիմեդյան բարձրացնող ուժի գործողության օրենքը կարելի է դիտարկել որպես հաղորդակցվող անոթների օրենքի հատուկ դեպք և հակառակը։
Եվս մեկ հարց տանք ինքներս մեզ, որի պատասխանը «հավերժական շարժման մեքենայի» հայտնագործողի համար որոշում է նրա համառության իրական հեռանկարը։ Ինչ են էներգիայի աղբյուրներՆկար 2-բ-ում հաղորդվող անոթների ձախ ճյուղում լողակի վրա բարձրացնող Արքիմեդյան ուժերի գործողության մեխանիզմի գործարկման և հաղորդակցվող անոթների ձախ ճյուղում հեղուկի մակարդակը պահպանելու մեխանիզմի գործարկման համար։ Նկ. 1-բ.
Նկարներում դիտարկված «հաղորդակցող անոթներ» և «արքիմեդյան ուժեր բարձրացնող» բնական էֆեկտների իրականացման մեխանիզմների համեմատական վերլուծությունից ակնհայտորեն հետևում է, որ էներգիայի ՆՄԱՆ աղբյուրը, ի վերջո, գրավիտացիոն ուժերի ԱՇԽԱՏԱՆՔՆ է։ ճիշտհաղորդակցվող անոթների ճյուղեր, որոնք փոխանցվում են ներս ձախհեղուկի գրավիտացիոն զանգվածի «սյուների» հիդրոստատիկ ճնշման ուժային գրադիենտ մեխանիզմի միջոցով հաղորդակցվող անոթ (տե՛ս պատկերված ներուժի հավասարազոր մակերեսների գծապատկերները):
Այս եզրակացությունը հաստատվում է մեխանիկայի պոստուլատով. «Աշխատող մարմինը շարժելու ցանկացած ուժի գործողության մեխանիզմը կարող է իրականացվել միայն և միայն ՀԻՄՆՎԱԾ ՀԵՏԱԶՈՏՎՈՒՄ Է մեկ այլ ուժի հակազդեցություն»։ Արքիմեդյան ուժը, պատկերավոր ասած, «հենվում է», ինչպես որ ասես, «հենվում» է հղման համակարգի հավասար պոտենցիալ մակերևույթների վրա, որոնք նկարներում նշված են կարմիր կետավոր գծով: Այս եզրակացությունը կարևոր է հետագա հիմնավորման համար:
Հաղորդակցող անոթների օրենքի մասին մեր հիմնավորման արդյունքում եկեք տանք հարցերի երրորդ շարքը և դիտարկենք երկրորդ տեսակի հավերժ շարժման մեքենայի աշխատանքի սկզբունքային դիագրամը, որն առաջարկվել է գյուտարարի կողմից Նկար 3-ում:

Նկար 3-ը ցույց է տալիս ուղղահայաց տեղադրված օվալաձև խողովակ: Մենք, ինչպես նախորդ օրինակներում, այն համարում ենք ձախ և աջ հաղորդակցվող անոթների համակարգ։ Ուղղիչ գնդիկներն ազատորեն տեղադրվում են խողովակի մեջ, ինչ-որ արտաքին շարժիչով հեղուկը բերվում է օղակաձև հոսքի մեջ (ժամացույցի սլաքի ուղղությամբ):
Հարցեր.
1. Ինչպես կազդի ուղղության փոփոխությունըգ Հաղորդակցող անոթների հեղուկի սյունակներում Արքիմեդի օրենքի կատարման արդյունքի վրա ձգողականության ուժերի և հիդրոստատիկ ճնշման ուժերի գրադիենտի համակարգեր՝ հաղորդակցվող անոթներում հեղուկի ուղղահայաց շարժման պայմաններում՝ գրավիտացիոն դաշտում։ մոլորակը, երբ այն իներցիայով բարձրանում է դեպի վեր և երբ իր քաշի ազդեցության տակ ընկնում է դեպի ներքև։
2. Կամք հայտնի հեղուկը դեպի վեր քշելու ֆիզիկական ազդեցությունը տիպի հայտնի ջրամբարձ սարք օդանավ»?
VD Inventor-ի պատասխանները.
Վերահսկիչ զանգվածի վրա գրավիտացիոն ուժի մեծությունը փոփոխվում է նրա ուղղահայաց շարժման ընթացքում՝ իր հղման շրջանակի հետ միասին.
Ձախ խողովակում «ընկնող» հոսքը մոտենում է անկշռությանը և Արքիմեդյան ուժերի բացակայությանը, իսկ իներցիայով «թռչող» գերբեռնվածությունը գործում է հոսքի վրա, և Արքիմեդյան ուժերը մեծանում են, հետևաբար, հեղուկի ուղղահայաց շարժման պայմաններում, առաջանում է այս ուժերի գործողության անհավասարություն, և կատարվում է նրանց աշխատանքը՝ հեղուկի զանգվածը միակողմանի հոսքի մեջ մղելու ժամացույցի ուղղությամբ:
Ըստ Արքիմեդի օրենքի բանաձևի՝ լողացող ուժի մեծության մասին, որտեղ.է\u003d 9,8 մ / վ 2 ազատ անկման արագացում; ա- հեղուկի շարժիչի (մեկնարկիչի) արտաքին ուժի արագացում դեպի ոլորուն խողովակի միջով հոսք. մհեղուկի ծավալի զանգվածն է, որը տեղաշարժվում է լողացող(ներով) կողմից:
ՖԱ = մգ, երբ հեղուկը ՉԻ շարժվում մոլորակի գրավիտացիոն դաշտի համեմատ.
Ֆ A ձախ \u003d մ (գ -ա),երբ հեղուկը շարժվում է մոլորակի գրավիտացիոն դաշտի համեմատ ներքև հոսքով:
ՖԻրավունք \u003d մ (g + a),երբ հեղուկը շարժվում է մոլորակի գրավիտացիոն դաշտի համեմատ վերընթաց հոսքով: Հետո:
մ (գ-ա) < m (g + a); Ֆ A ձախ< ՖԱ-ն ճիշտ է.
Օղակաձև խողովակի (հաղորդակցող անոթների) երկայնքով հեղուկի սկզբնական արագացումից հետո ինչ-որ արտաքին շարժիչով, այնուհետև դրա անջատման պահին. լողացողների ամբարձիչ ուժի արժեքը համարվում է հեղուկի AILIFT-DRIVE-ի ուժը դեպի հոսք (ըստ անալոգիայի ջրամբարների «օդափոխիչ» սարքերի աշխատանքի սկզբունքի, որտեղ լողացողները գործում են որպես մխոցներ. մղել դեպի վեր հոսքը): Այս շարժիչ ուժը, համաձայն Արքիմեդի օրենքի և հաղորդակցվող անոթների օրենքի, որոշվելու է հետևյալով.
ՖԱվտոմեքենա = ՖԻրավունք - ՖՁախ = m (g + a) - m (g - a).
Նշում:Արքիմեդյան շարժիչի (շարժիչի) արդյունավետությունը գրավիտացիոն դաշտում Արքիմեդյան ուժերի տարբերակում ապացուցելու նույն մեթոդը կիրառելի է Արքիմեդյան շարժիչի (շարժիչի) համար՝ կենտրոնախույս իներցիայի ուժերի դաշտում Արքիմեդյան ուժերի տարբերակում։ . Գյուտի մեջ ես օգտագործել եմ շարժիչի սխեմայի երկրորդ տարբերակը՝ Արքիմեդյան ուժերի աշխատանքով, էջՌուսաստանի Դաշնության արտոնագիր No 2396681 10.08.2010 «Էլեկտրամագնիսական հիդրոդինամիկական գեներատոր (EMGDG)»: Այստեղ ես կպարծենամ միայն նրա ապագա տեսքի սպասված պատկերով։
գրականություն :
1. Բոգոմոլով Վ.Ի. Ռուսաստանի Դաշնության արտոնագիր թիվ 2396681 08/10/2010 «Էլեկտրամագնիսական հիդրոդինամիկական գեներատորի (EMGDG)» համար http://khd2.narod.ru/authors/bgmlv/bgmlv.htm;
2. Բոգոմոլով Վ.Ի. Ֆիզիկայի M-պարադիգմ. .
3. Զուև Վ.Վ. «Էներգիայի խտությունը, օգտակար հանածոների հատկությունները և երկրի էներգետիկ կառուցվածքը» - Սանկտ Պետերբուրգ. Նաուկա, 1995 - 128 թթ.
Է.Արսենտիևին ուղղված նամակից
Բարև Յուջին:
Կես ձմեռ հիվանդացա, գիտաֆանտաստիկա կարդացի։ Զվարճանքի համար ես մտածեցի այլընտրանքային պատմության մասին, որտեղ նավերի համար նախատեսված գոլորշու շարժիչները կարող էին հայտնվել մի քանի հազար տարի առաջ:
Այստեղից է առաջացել սխեման: Դրա առանձնահատկությունն այն է, որ որքան բարձր է հեղուկի հոսքի մեջ ուղղահայաց «ուժային» խողովակի «օդափոխումը», այնքան ավելի մեծ է Արքիմեդյան շոգեմեքենայի արդյունավետությունը: Հետեւաբար, կառուցվածքի մի մասը պետք է տեղադրվի ոչ միայն կորպուսի մեջ, այլ նաև կիլի վրա, օրինակ՝ զբոսանավի վրա։
Արքիմեդյան շարժիչի աշխատանքի սկզբունքի մասին՝ ըստ իմ ՌԴ արտոնագրի EMGDG էլեկտրական գեներատորի համար (որը, ցավոք, արդեն մեկ տարի է, ինչ ոչ ոքի չի հետաքրքրում!) Ես հոդված գրեցի մեկ էջում։ «Ուրիշ ինչի՞ մասին է մեզ ասում հաղորդակցվող անոթների օրենքը»:.Նամակին կցեցի ֆայլ։ Նյութը կարող է օգնել DIY էնտուզիաստին պարզել, թե երբ է նման զբոսանավի մոդելը կառուցում:
Հարգանքներով՝ Վյաչեսլավ
Steam Archimedean շարժիչ-օդափոխիչ Բոգոմոլով
Arsentiev vortex jet-ով զբոսանավերի համար

Գոլորշի կաթսայի շահագործման համար օգտագործողի կողմից ծախսվող ոչ վերականգնվող վառելիքի էներգիան ավելացվում է շրջակա միջավայրից ազատ վերականգնվող էներգիայի երկու աղբյուր.
1. Ձևավորվում է գոլորշու կաթսայով ուղղահայաց խողովակում գոլորշու փուչիկները և կոնվեկտիվ հոսանքները սարքին էներգիա են ավելացնում Արքիմեդյան ուժերի աշխատանքի շնորհիվխողովակի միջով դեպի վեր հոսում է դեպի վեր և այդպիսով գործում են որպես մխոցներ՝ գոլորշու-ջուր խառնուրդը հոսքի մեջ մղելու համար խողովակաշարով դեպի ջրի շիթ: Միևնույն ժամանակ, խողովակի ներքև հոսքի մեջ Արքիմեդյան ուժեր չկան և չեն դանդաղեցնում հոսքը: Միաձուլվող պարույրաձև խողովակաշարի շնորհիվ հոսքի արագությունը մեծանում է, երբ մոտենում է վարդակին:
2. Գոլորշի-ջուր խառնուրդ վարդակով ներարկվել էռեակտիվ հորձանուտի մեջ որպես տաք և ընդլայնված աշխատանքային հեղուկ: Ձևավորված տորոիդային հորձանուտը մի կողմից անընդհատ համալրվում է սարքից աշխատող հեղուկի տաք հոսքով։ Իսկ մյուս կողմից, աշխատանքային հեղուկի մշտական սառեցման և ադիաբատիկ սեղմման արդյունքում. համալրվում է արտամղվածԱրտաքին ջուր խորության վրա միջավայրի ազատ ուղեկցող ճնշման տակ: Խորը ճնշման ուժերի աշխատանքը շարժիչ շարժիչին ուժ է ավելացնում։
3. Մի ձևից մյուսը անհարկի միավորների-էներգիայի փոխարկիչների բացակայությունը, մեխանիկական փոխանցման տուփերի և շարժվող մեխանիկական մասերի բացակայությունը մեծացնում է սարքի արդյունավետությունն ու հուսալիությունը:
N.B.: Կարծում եմ, որ մոլորակի հիդրոստատիկ ճնշման ուժերի ազատ աշխատանքի էներգիայի ապարատային օգտագործման հայտարարված հիմնարար հնարավորությունը պտտվող ջրային շիթային շիթային շարժիչ-շարժիչի սխեմայում նման է V-ի «պայթեցման» սկզբունքին. Շաուբերգեր.
Լրացուցիչ միտք կա. Օդափոխիչի խողովակի ներսում վառարանի և գոլորշու կաթսայի դերը կարող է իրականացվել ջրի էլեկտրոլիզի սարքի միջոցով՝ բարձր լարման իմպուլսային աղեղով հենց օդափոխիչի խողովակի ներսում և անմիջապես այրել ստացված ջրածին-թթվածին խառնուրդի փուչիկները (միկրոպայթյուններ), և դրանով իսկ առաջանում են գոլորշու փուչիկներ հոսանքի խողովակում: Էլեկտրոլիզի և միկրոպայթյունների արդյունքում խողովակի հեղուկը իոնացված կլինի, այնուհետև որպես էլեկտրական լիցքավորված աշխատանքային հեղուկ, գոլորշիացումից բացի, հնարավոր կլինի օգտագործել՝ ըստ իմ մտքի. EMGDG արտոնագիր՝ մագնիսահիդրոդինամիկական գեներատորով էլեկտրաէներգիա արտադրելու համար՝ վոլտային աղեղի հետագա սնուցման համար... Սա կլինի գոլորշու Արքիմեդյան շարժիչի հզորությունը հորձանուտ-ջրային շիթով ավելացնելու երրորդ եղանակը:
Լ.Ա. Յուտկինի էլեկտրահիդրավլիկ ազդեցությունը (հիդրավլիկ պայթյուն կայծով), որն օգտագործվում է որպես «ռետնետող» («YuT» 1957), անմիջապես ընդունելի է։
Կցված է ներքին այրման գոլորշու շարժիչի սխեմայի տարբերակը:
Գոլորշի «կաթսա» գազի վրա.
(Ընտրանքներ՝ ջրածին + թթվածին; պրոպան + օդ)

Այրման պալատ գազի արտանետման պարզ ավտոմատ համակարգ աշխատանքային խառնուրդի ցիկլային պայթյունի համար: Նախատիպը ներքին այրման շարժիչի երկհարվածի աշխատանք է։
Այրման խցիկում այրվող խառնուրդի ձևավորման համար գազի առաջին մասը, երբ շարժիչը գործարկվում է, ձեռքով մղվում է ճնշման տակ գտնվող պոմպի միջոցով, այնուհետև դրա պայթյունը սկսվում է էլեկտրական լիցքաթափումից (կայծ, աղեղ), արդեն առանց արտաքին պոմպի մասնակցություն.
Խցիկում պայթյունից հետո գոլորշու-ջուր խառնուրդի մի մասը իմպուլսով ներարկվում է օդափոխիչի խողովակի մեջ, իսկ խցիկում ազատված ծավալը, հետևաբար, հաղորդակցվող անոթների օրենքի համաձայն, զբաղեցնում է օդափոխիչի խողովակի ջուրը: . Այս ջուրը սեղմում է աշխատանքային խցիկում առաջացած այրվող խառնուրդը ճնշման տակ օդային զանգի սկզբունքով, օդային զանգի խորությանը համապատասխան, ջրամբարի մեջ։ Անմիջապես, աշխատանքային խառնուրդի հաջորդ բռնկումը տեղի է ունենում ինքնաբերաբար:
Նման պարզ դիզայնի սխեմայով «ներքին այրման գոլորշու շարժիչ»Արհեստի համար ամենադժվարը կլինի խողովակաշարի խստության հասնելը այրման պալատի և գազի փականների որակի հետ մեկտեղ:
Պատճառաբանություն Clem շարժիչի շահագործման մեջ ֆիզիկական ազդեցությունների թեմայի վերաբերյալ
(Բայց ոչ դրա դիզայնի մանրամասների մասին):
Եկեք մի քանի սպեկուլյատիվ փորձեր անենք։
Պատկերացրեք AB խողովակը լցված հեղուկով: Դիտարկենք երկու հնարավոր մեխանիկականհեղուկը խողովակի միջով տեղափոխելու միջոց. Սա: գրադիենտ տարբերությունճնշումները խողովակի երկայնքով հեղուկ նյութի կառուցվածքում և զանգվածային իներցիոն ուժհեղուկ նյութեր.

Եթե խողովակը ամրացված է պտտվող լիսեռի վրա այնպես, որ այն դառնա կոնի կողային մակերեսի գեներատոր, ինչպես նկար 1-ում (այս դիզայնը կոչենք «ռոտոր»), ապա կենտրոնախույս ուժի ազդեցության տակ. (CBS) մենք կարող ենք դիտարկել վերը նշված մեթոդները ՔՇԵԼհեղուկներ հոսքի մեջ: Այս մեթոդներն իրականացնելու համար դուք պետք է ստեղծեք մի քանիսը բավարար պայմաններ , որովհետեւ այս մեթոդները միշտ չէ, որ կիրառվում են կենտրոնախույս ուժերի դաշտում։
1. Եթե վերջի անցքը ATխողովակներ փակված(ազդեցության իրականացման պայմանը), այնուհետև խողովակում կենտրոնախույս ուժերի ազդեցությամբ շառավղ. ճնշման գրադիենտմի կետում առավելագույն ճնշում ունեցող հեղուկի մեջ AT. (առանց DRIVE)
2. Եթե անցքերը մակերեսով հավասար են և բացել, ապա ԿԲ-ն չի ստեղծի ԼՐԱՑՈՒՑԻՉ ճնշում, այլ կառաջանա մեկ այլ պայման՝ իներցիայով հոսքի մեջ մղումը իրականացնելու համար։
Եթե խողովակի A և B ծայրերի անցքերը բացելև իներցիայի կենտրոնախույս ուժի ազդեցությամբ նյութի զանգվածը տեղափոխելու ազատություն կա, այնուհետև հեղուկը շառավղով կշարժվի խողովակի միջով՝ շտապելով A կետից B: Եթե անցք A իջեցվի անոթի մեջ (բաց դեպի մթնոլորտ), այնուհետև նավից հեղուկը մղվելու է ներքևից վեր՝ կենտրոնախույս պոմպի նախագծման սկզբունքով (կա DRIVE): Այս դեպքում երկու մեթոդներն էլ (ճնշման գրադիենտ և կենտրոնախույս ուժ) ներգրավված են հեղուկը շարժման մեջ բերելու համար:
3. Եթե մեր խողովակի A և B ծայրերը միմյանց հետ կապված են մեկ այլ խողովակով օղակաձև խողովակաշարի տեսքով (պտտվող AB խողովակի հետ ՄԻԱՍԻՆ), ապա հեղուկի զանգվածը ՉԻ շարժվի խողովակի միջով, քանի որ. օղակաձև խողովակաշարում կստեղծվեն երկու հակադիր ճնշման գրադիենտներ, որոնք փոխհատուցում և արգելակում են միմյանց: AB խողովակի կենտրոնախույս ուժը չի կարողանա տեղափոխել նյութը, քանի որ չկա ազատություն (Չկա DRIVE):
4. Եթե վիրտուալ փորձարարական հենարանի հատուկ դիզայնը (նկ. 2) թույլ է տալիս AB խողովակին (ռոտորին) շարունակել ՊՈՏԱՑՈՒՄԸ LOOPED խողովակաշարում, սակայն ծայրերը միացնող խողովակը կֆիքսվի: ԴԵՌ(այս դիզայնը կոչենք «ստատոր»), հետո՝ այլ կոնկրետ պայմանները CBS-ի գործողության ներքո հեղուկի շարժման իրականացում, մասնավորապես՝ ինչպես 1-ին և 2-րդ նկարների դեպքում, հեղուկի զանգվածը շառավղով կշարժվի խողովակի երկայնքով, կշարժվի վերև՝ A կետից մինչև B (կա ԴՐԻՎ. «կենտրոնախույս պոմպ» տիպ):
Ինչո՞ւ։ Որովհետև, ի տարբերություն թիվ 3 պարբերության պայմանների, ԱՅՍ օղակաձև խողովակաշարում ՉԻ ՍՏԵՂԾՎԻՀակառակ ճնշման գրադիենտները, որոնք փոխհատուցում են միմյանց, քանի որ գրադիենտթիվ 2 կետի սխեմայի նման ճնշում ընդհանրապես չի լինի։ Մեկ ճնշումը հավասար է առավելագույնը ճնշում B կետում. Ինչո՞ւ։ Քանի որ, համաձայն Պասկալի օրենքի, հեղուկը հավասարաչափ փոխանցում է առավելագույն ճնշումը B կետից ամբողջ փակ խողովակաշարով, եթեխողովակի միջով հոսքի խաչմերուկի տարածքը և հոսքի արագությունը նույնն են խողովակաշարի ամենուր:
Այսպիսով, մեր ստենդը սկսեց աշխատել, նախ՝ որպես էներգիայի կուտակիչ, ոչ միայն հեղուկ զանգվածի պտտման կինետիկ էներգիան, այլեւ հեղուկ զանգվածի թարգմանական հոսքի կինետիկ էներգիան։ Միևնույն ժամանակ, կենտրոնախույս DRIVE-ի աշխատանքի արդյունքում առաջացած հոսքի արագությունը կավելանա CLS-ի գործողության ներքո, մինչև այդ աշխատանքը չփոխհատուցվի խողովակների հիդրոդինամիկ դիմադրության ուժերի աշխատանքով: Համապատասխանաբար, շփման ուժերի աշխատանքի էներգիան կվերածվի ջերմային էներգիայի, իսկ ստենդը, երկրորդը, կաշխատի նաև որպես ջերմային գեներատոր։
5. Եթե փորձնական կարգաբերման մեջ որևէ կերպ (նկ. 3) մենք լրացուցիչ տեղադրենք տուրբին STATOR հատվածում գտնվող շղթայի մեջ, ապա մենք կստիպենք հեղուկին շարժվել հակառակ ուղղությամբ VA ռոտորի երկայնքով, կենտրոնախույս ուժերի ուժից ավելի մեծ ուժով,քանի որ այս ԱՐՏԱՔԻՆ շարժիչի շահագործման համար ծախսված էներգիայի համաձայն, Coriolis-ի իներցիայի ուժերը կլինեն. ինքնագլորումռոտոր.
Մենք դա կենթադրենք ինքնագլորվողռոտորը Clem մեքենայի նախագծման նպատակն է: Քիչ հավանական է, որ վարդակների շիթերը կատարեն այս գործառույթը: Կարծում եմ ոչ թե վարդակներ, այլ վարդակներ են պետք միայն հեղուկը սառեցնելու համար։
6. Եկեք դիտարկենք մեկ այլ նախագծման տեխնիկա (բացի արտաքին շարժիչ տուրբինի օրինակից) ԻՆՉՊԵՍ ուժ տեղափոխել հեղուկը խողովակաշարի երկայնքով հակառակ ուղղությամբ: հակազդելովԻներցիայի կենտրոնախույս ուժերի ԴՐԻՎ-ի գործարկումը, որը նշանակում է կենտրոնախույս ուժերի ուժից ավելի մեծ ուժով:
Դա անելու համար ռոտորի BA հատվածում պտտվող հոսքի մի մասը REPLACE ալիք«Արքիմեդի պտուտակ» հայտնի մեխանիզմի սխեմայի համաձայն. Այն փոխակերպում է պտուտակի պտտվող շարժումը հեղուկի թարգմանական շարժման: Արքիմեդի պտուտակով հոսքի այս առաջ շարժումն է, որը կստեղծի հակառակ հոսքի ուղղությունը ամբողջ օղակաձև խողովակաշարում, որն ավելի մեծ է և հակասում է ռոտորային հեղուկի զանգվածի իներցիայի կենտրոնախույս ուժերին:
AB խողովակի փոխարեն մենք օգտագործում ենք AB ալիքը, եկեք ՌՈՏՈՐ-ը դարձնենք Արքիմեդի պտուտակի պես պարուրաձև ալիքով կոնի տեսքով, ինչպես Կլեմի մեքենայի նմանատիպ հատվածը։ Կոն պտուտակը կստեղծի բարձր LOCKING ճնշում կոնի ծայրում՝ հակազդելու և տապալելու կենտրոնախույս ուժը:
Ի՞նչ ստացանք մեր սպեկուլյատիվ փորձարարական դիրքի նման սխեմայով: Էներգիայի վատնում արտաքինշարժիչ ռոտորը պտտելու համար, սարքն իրականացնում է առնվազն երկու ֆիզիկական ազդեցություն.
Ա) Ստեղծվում են իներցիայի կենտրոնախույս ուժեր, և այդ ուժերի աշխատանքը բարձր ճնշում է ստեղծում օղաձև խողովակաշարում որպես ամբողջություն: Ես ուշադրություն եմ հրավիրում իմ կողմից առաջարկվող պոստուլատի վրա, այն է՝ Էֆեկտայստեղ առաջացող «ճնշում հեղուկի մեջ» երևույթը՝ որպես պահեստավորվածի գոյության երևույթ ԱՆՎՃԱՐէներգիա ռոտոր-թռիչքի հեղուկի զանգվածի պտտման ժամանակ։ Ինչու՞ անվճար: Քանի որ այս ճնշման էներգիան սպառողը կարող է ցանկացած կերպ օգտագործել անվճար, իսկ դրանից հետո ռոտորն արգելակելով՝ հնարավոր է վերականգնել պտտվող անիվի կուտակած զանգվածի պտտման ողջ կինետիկ էներգիան, որը ծախսվել է արտաքին շարժիչի ընթացքում։ ճոճանի պտույտը: Պտտման կինետիկ էներգիայի վերականգնման մասին հղումը ապացուցում է կենտրոնախույս ուժերի դաշտում հեղուկում ճնշման առաջացման անհատույց բնույթը։ Ճնշման էներգիայի շնորհն օգտագործելու եղանակներից մեկը հեղուկի ներքին կառուցվածքի վերակառուցումն է:
Բ) Ստեղծվում են կորիոլիսի իներցիայի ուժեր, որոնք փոխակերպում են ԱՇԽԱՏԱՆՔԸ և էներգիան (առայժմ, ասենք, ցանկացած շարժիչի ԱՐՏԱՔԻՆ աղբյուրը) հեղուկ զանգվածի շառավղային տեղաշարժով ռոտորի շարժիչի ԱՇԽԱՏԱՆՔԻ մեջ, իսկ պտտման կինետիկ էներգիան։ ռոտորային հեղուկի զանգվածի Եվ նաև Coriolis ուժերի աշխատանքը նույնպես ստեղծում է լրացուցիչ ճնշում, կենտրոնախույս ուժերի ԱՇԽԱՏԱՆՔԻ ստեղծած հակադիր հոսքը «կողպելով».
7. Որտեղ ստանալ ազատ էներգիաև ինչպես ձևավորել նման հակահոսանքի գլուխ կենտրոնախույս ուժերի կողմից առաջացած ճնշման նկատմամբ, որպեսզի ձևավորվի հեղուկ զանգվածի շարժման պատշաճ արագություն ծայրամասից մինչև ռոտորի կենտրոն (B կետից մինչև A կետ) և, հետևաբար, « պարկեշտ» Coriolis ուժերը, որոնք ունակ են «արժանապատիվ» ինքնագովազդում ռոտոր?
Ուշադրություն դարձրեք այնպիսի կոնկրետ պարամետրերին, որոնք սարքում կհայտնվեն Clem սխեմայի համաձայն, երբ այն գործարկվի (առաջխաղացում) արտաքին մեկնարկչի կողմից: AB խողովակի փոխարեն օգտագործեցինք կոն պտուտակի ալիքը, որը պատրաստված էր այնպիսի ձևի հաշվարկներով, որ հոսքի առաջ շարժման արդյունքում ստեղծված ճնշումը լինի «արժանապատիվ» b. մասինավելի մեծ, քան կենտրոնախույս ուժերի կողմից ստեղծված հոսքի ճնշումը: Իսկ դա նշանակում է, որ պարուրաձև ալիքում՝ B-ից A հոսքի մեջ, կձևավորվի այնպիսի պարամետր, ինչպիսին է «բարձր ճնշումը»: Coriolis-ի ուժերի աշխատանքի շնորհիվ ռոտորի «արժանապատիվ» արագություն ստեղծելու համար ալիքով հեղուկի հոսքի արագությունը պետք է մեծ լինի: Հեղուկի ալիքով բարձր արագությամբ շարժվելիս առաջանում են հիդրոդինամիկ դիմադրության և ուղղակի շփման «արժանապատիվ» ուժեր՝ հեղուկի ևս մեկ ձեռք բերված պարամետր՝ որպես աշխատող հեղուկ և աշխատանքային մարմին մեր սարքում:
Ի՞նչ կարող են մեզ տալ հեղուկի նման ձեռքբերված պարամետրերը հիմնավորման և ենթադրական փորձի այս փուլում: Նրանք ՄԻԱՍԻՆ ԿԱՐՈՂ են պայմաններ ստեղծել վերակազմավորում հեղուկներ .
8. Մենք շատ գոհ կլինենք, եթե Արքիմեդի պտուտակով ալիքով մղվող հեղուկը նույնպես մեծանա, երբ տաքացվի՝ մեծանալով ալիքի այս հատվածում ծավալով: Եթե նյութի կողմից կուտակված հզոր մոլեկուլային ուժերը ի հայտ գան, և էներգիայի այս «վերակտիվացված» աղբյուրը կօգնի մեզ ստեղծել «արժանապատիվ» հոսքի ճնշում B-ից A ուղղությամբ, ապա մենք կարող ենք կանխատեսել, որ այն բանից հետո, երբ մեկնարկիչը պտտվում է մինչև ռոտորի որոշակի արագություն, ապա ռոտորը կարող է շարունակել իր անկախ պտույտը հեղուկի ներքին էներգիայի շնորհիվ:
Ինչ կլինի նիհարընդլայնվող հեղուկի ուժը, որը գործում է որպես հեղուկի զանգվածի շարժառիթ դեպի հոսք, որը կենտրոնախույս ուժով հակազդում է Շարժիչին` հոսքը հակառակ ուղղությամբ ուղղելու համար: Ուժը կարող է ապավինել միայն մեկ այլ ուժի՝ մեխանիկայի օրենքին: Պատասխանը սա է. Ընդարձակվող հեղուկը կընդլայնվի Արքիմեդի պտուտակով ձևավորված VA հոսքի ուղղությամբ, թեքվելովԱրքիմեդի պտուտակից VA-ի իմպուլսի ուժի վրա, Արքիմեդի պտուտակով ԱՐԴԵՆ ՆԱԽԿԻՆ ՁԵՎԱՎՈՐՎԱԾ հոսքի զանգվածի իներցիայի ուժի վրա։
Կան հեղուկներ, որոնք տաքացնելիս «արժանապատիվ» լայնանում են։ Կլեմն օգտագործում էր արևածաղկի ձեթը որպես հեղուկ աշխատող հեղուկ։ Հիդրոդինամիկ դիմադրությունը և շփումը երաշխավորված են հեղուկը բարձր ջերմաստիճանի տաքացնելու համար: Ճնշման տակ ջեռուցումը տեղափոխում է ջերմաստիճանի սահմանը, դրա փուլային անցման չափը, եռումը՝ հետագայում մեծացնելով գերտաքացած հեղուկի ընդլայնման ծավալը։ Կարելի է ենթադրել, որ նման պարամետրերով կարող է առաջանալ կավիտացիա և, հնարավոր է, դա կնպաստի նաև ճնշման բարձրացմանը…
9. Համապատասխանաբար, փակ համակարգում շարժման մեկ ցիկլով (ցիկլով) տաքացվում է հեղուկը, մինչև նոր ցիկլը սկսելը, պետք է ստիպել սառեցնել . Օրինակ՝ սկզբում սրսկել վարդակների միջով, իսկ հետո լրացուցիչ անցնել հովացման ռադիատորի միջով։ Եվ եթե Clem շարժիչում, ինչպես գոլորշու շարժիչը, սկսվում է նյութի կառուցվածքի ցիկլային վերադասավորումը, երբ այն տաքացվում և ընդլայնվում է, եթե դա ազատում է հեղուկի ներքին էներգիան, որն ընդունակ է վերածվել պտտման մեխանիկական էներգիայի։ ռոտորը, ապա (!) Ոչ ոք չեղարկեց Կարնո ցիկլի օրենքը:
10. Բայց հետո մնում է հարցը՝ որտե՞ղ է ազատ էներգիայի աղբյուրը, որի շնորհիվ, ի վերջո, ընդլայնվելով, հեղուկը պտտում է ռոտորը։ Իմ պատասխանը. Այստեղ անվճար էներգիայի աղբյուրը ՆՎԵՐԻ ստեղծած ՃՆՇՈՒՄն է իներցիայի կենտրոնախույս ուժեր.
Հիպոթեզի հայտարարություն . Ձեռք է բերվել այն տեխնիկական լուծումը, որն ապահովում էր Clem շարժիչի աշխատունակությունը համակարգհաջորդաբար («loopback») իրագործելի ֆիզիկական ազդեցություններ.
Արքիմեդի պտուտակի ալիքում կենտրոնախույս ուժերի գործողության դաշտում ազատ ճնշում է առաջանում (և առաջանում են Կորիոլիսի ուժեր);
Ճնշման ուժերի մեխանիկական աշխատանքը, հոսքի արագությունը և շփումը ալիքում տաքացնում են հեղուկը.
Ջրանցքում տաքացվող հեղուկը լայնանում է և կազմում բ մասինՀեղուկի զանգվածի շարժման ավելի մեծ աշխատանք դեպի հոսք, քան դրան հակադրվող կենտրոնախույս ուժերի շարժման աշխատանքը.
Հեղուկի հոսքի աշխատանքը զանգվածի շառավղային շարժման վրա ծայրամասից դեպի կենտրոն (ուղի VA) Coriolis-ի իներցիայով ուժերով ինքնաբացում է Արքիմեդի ռոտոր-պտուտակը.
Ռոտորի ինքնուրույն պտույտը առաջացնում է կենտրոնախույս ուժերի դաշտ և Արքիմեդի պտուտակի աշխատանքը, և, ամենակարևորը, ընդլայնվող հեղուկը շարժման մեջ է դնում հոսքը ստատորի միջով, որպեսզի կրկնի օղակաձև հեղուկի հոսքի նոր ցիկլը: սարք;
Ստատորի հովացման ռադիատորի միջոցով հեղուկի հոսքը պայմաններ է ստեղծում ջերմային շարժիչների համար Carnot ցիկլի համար:
Այսպիսով, Clemas շարժիչի շահագործման համար էներգիայի աղբյուրը երկու բնական ֆիզիկական ազդեցություն է, այն է՝ ազատ ճնշում ռոտորում կենտրոնախույս ուժերի դաշտում և հեղուկի ազատ սառեցում ստատորի արտաքին միջավայրի կողմից: Սառչելիս ադիաբատիկ կերպով սեղմվելով՝ հեղուկը կարող է ձևավորել հոսքի «ներծծում» ռոտորային ալիքի մի մասից դեպի ստատորի ալիք՝ առաջացնելով շարժիչի լրացուցիչ հզորություն:
Clem շարժիչի համակարգը փակ չէ, այն իրականացնում է թերմոդինամիկ և իներցիոն էներգիայի փոխանակում շրջակա միջավայրի հետ և օգտագործում է շրջակա միջավայրի ազատ էներգիայի մի մասը այս էներգիայի փոխանակման ժամանակ:
Գյուտի նկարագրությունը
«Bogomolov Generator - Converter (GB-K)»
Գյուտի սահմանումը, դրա նպատակը .
«ԳԲ-Կ» սարքը նախատեսված է սպառողի համար էլեկտրական էներգիա ուղղակի հոսանքի տեսքով ստանալու համար։ Վերաբերվում է էլեկտրակայաններին, որոնք օգտագործում են վերականգնվող բնական ռեսուրսների այլընտրանքային էներգիայի աղբյուրներ:
Սարքի դիզայնը իրենից ներկայացնում է համակարգ, երկու բաց համակարգերի համալիր՝ մեխանիկական և էլեկտրական։ Սրանք բաց (ոչ փակ) համակարգեր են, որոնք կապված են շրջակա միջավայրի հետ էներգիայի փոխանակման և դրանից էներգիա վերցնելու միջոցով, ինչպես նաև այլ հայտնի այլընտրանքային էլեկտրակայաններ, արևային մարտկոցներ, հողմաղացներ, հիդրոէլեկտրակայաններ:
Քանի որ «AK» սարքը բաց համակարգ է, դրա գործողության սկզբունքը չի խախտում էներգիայի պահպանման և փոխակերպման օրենքը, հետևաբար «AK» սարքը տեսականորեն չի կարող դասակարգվել որպես «առաջին և երրորդ տեսակի հավերժ շարժման մեքենաներ»: սկզբունքորեն անհնարին սարքեր:
«ԳԲ-Կ»-ն դրանով տարբերվում է որպես այլընտրանքային էներգիայի աղբյուր վերականգնվող բնական ռեսուրսներՖիզիկական վակուումի միջավայրի ազատ էներգիան օգտագործվում է իներցիայի կենտրոնախույս ուժերի ազատ աշխատանքի տեսքով, որը սարքի կողմից վերածվում է էլեկտրական էներգիայի։
«GB-K»-ը փոփոխված «GB-1998»-ն է։

Նկարներ 1a, 1b և 1c ցույց են տալիս « Պնևմոհիդրավլիկ կենտրոնախույս արագության կարգավորիչ (TsRS)» GB-1998-ի համար: Այս միավորի նախագծումը, պտտման կինետիկ էներգիայի և անկյունային իմպուլսի պահպանման օրենքներին համապատասխան, ապահովում է տեխնոլոգիայի մեջ մեխանիզմների ավտոմատ կարգավորում՝ պտտման մշտական արագությունը պահպանելու համար: «Pneumohydraulic CRS» գյուտի նախատիպը «Watt centrifugal speed controller» լծակն է (նկ. 2):

CRS-ը (նկ. 1ա, 1բ և 1գ) բաղկացած է միաձույլ մարմնի ռոտորից՝ հեղուկ զանգվածի խցիկներով՝ գլանաձև (ռոտորի պտտման առանցքի երկայնքով) և ոսպնյակային խցիկով: Ոսպնյակաձեւ խցիկի ներսում տեղադրված է ճնշված գազով լցված առաձգական փուչիկ։ Այն գործում է որպես օդային աղբյուր։ Մնացած տարածքը լցված է ծանր հեղուկով:
Սարքի մեջ» Բոգոմոլովի գեներատոր 1998 (GB-1998)«(Նկար 2b) կենտրոնախույս արագության կարգավորիչը (նկ. 1ա, 1բ և 1գ) կատարում է հիմնական գործառույթը. առաջացնողպտտման ազատ կինետիկ էներգիա (մեխանիկական էներգիա) ցիկլային արագացման և դանդաղման ռեժիմում (հեղինակային նոու-հաու): «ԳԲ» սարքում TsRS-ը որպես թռչող անիվ գտնվում է շրջելի էլեկտրական մեքենայի «շարժիչ-գեներատորի» հետ նույն լիսեռի վրա (նկ. 2բ): Արագացման ցիկլում ցիկլային աշխատանքի ընթացքում CRS-ն առաջանում է էլեկտրական շարժիչի կողմից, իսկ ճանճը կուտակում է կենտրոնախույս ուժերի ազատ աշխատանքի էներգիան. Արգելակման ցիկլում բեռի տակ գտնվող էլեկտրական գեներատորի դիմադրությամբ, էլեկտրական էներգիան ծախսվում է էլեկտրական շարժիչի կողմից թռչող անիվ-CRS-ի պտտման վրա. ապաքինվել, իսկ CRS թռչող անիվի հավելյալ ազատ մեխանիկական էներգիան էլեկտրական մեքենայի (գեներատորի) միջոցով վերածվում է ազատ էլեկտրականության։
Փոփոխված «ԳԲ» սարքում, «ԳԲ-Կ» սարքում
«Օդաճնշական-հիդրավլիկ կենտրոնախույս արագության կարգավորիչ (CRS)» միավորը կառուցվածքային ձևափոխվել է լրացուցիչ գործառույթի համար (գումարած աճող մեխանիկական էներգիա արտադրելու գործառույթը), այն է՝ իր սեփական անվճար էլեկտրաէներգիայի արտադրության համար: CRS ստորաբաժանումը թռչող անիվի սեփական մեխանիկական աշխատանքը վերածում է էլեկտրական պոտենցիալի, մեծացնում է լարումը շղթայում՝ համաձայն հայտնի տիպի սարքի՝ էլեկտրամեխանիկական «փոխարկիչի» գործողության սկզբունքի (գյուտի նախատիպ): capacitive converter (տրանսֆորմատոր) (նկ. 4):

GB-K սարքի TsRS-ը (նկ. 3ա, 3բ և 3գ) բաղկացած է հեղուկ զանգվածի խցիկներով պինդ մարմին-ռոտորից՝ գլանաձև (ռոտորի պտտման առանցքի երկայնքով) և ոսպնյակային խցիկից։ Էլեկտրահաղորդիչ հեղուկը ազատորեն շարժվում է խցիկի ներսում:
Նկար 3ա-ն ցույց է տալիս CRS-ն առանց հեղուկ աշխատող հեղուկի: Նկար 3c ցույց է տալիս սկզբում հեղուկ էլեկտրոդի դիրքը (կանաչ գույն, աշխատանքային հեղուկ): առաջին CRS-ի աշխատանքի ցիկլը որպես փոխարկիչ Նկար 3b ցույց է տալիս հեղուկ էլեկտրոդի դիրքը (կանաչ գույն, աշխատանքային հեղուկ) վերջում երկրորդ CRS-ի տակտը, որպես փոխարկիչ:
Գյուտի նախատիպի փոխարկիչի շահագործման սկզբունքը.
(Տե՛ս օգնությունը հոդվածի վերջում)
Տիպիկ մեխանիկական փոխարկիչում ցածր մուտքային լարումU 1U 2, մինչդեռ ելքային հոսանքն ու մուտքային հոսանքը նույնն են։ Ելքային հզորությունը գերազանցում է մուտքային էլեկտրական հզորությունը: Այս ֆիզիկական փոխակերպման էֆեկտը (էլեկտրաստատիկ ինդուկցիայի էֆեկտը) իրականացվում է արտաքին շարժիչի էներգիայի սպառման պատճառով մեխանիկական աշխատանքի համար՝ լիցքավորված փոփոխական հզորությամբ կոնդենսատորի թիթեղները բաժանելու (տեղափոխելու) համար։U 1նվազագույն հեռավորության վրա. Երբ էլեկտրոդները տեղափոխվում են առավելագույն հեռավորություն, ավելի բարձր ելքային լարում է ձեռք բերվումU 2.
Փոխարկիչ-միավոր TsRS VGB-2011 սարքը և աշխատանքի սկզբունքը տարբերվում են նախատիպից նրանով.
Փոփոխական հզորության կոնդենսատորը թիթեղային էլեկտրոդներով փոխարինվել է «Լեյդեն բանկա» տիպի կոնդենսատորի անալոգով, որն ունի կենտրոնական ձողային էլեկտրոդ և երկրորդ էլեկտրոդապատում նավի ծայրամասում։ GB-2011-ում Լեյդեն սափորի անոթի դերը կատարում է CRS-ի աշխատանքային պալատը.
Նախատիպ փոփոխական կոնդենսատորի շարժական պինդ վիճակում գտնվող թիթեղ-էլեկտրոդը փոխարինվել է GB-2011-ում էլեկտրահաղորդիչ հեղուկով: Հեղուկ էլեկտրոդը կարող է ազատորեն շարժվել աշխատանքային խցիկի կենտրոնական մասից դեպի ծայրամաս:
TsRS փոխարկիչի աշխատանքի սկզբունքը GB-2011 (GB-K) սարքում.
Առաջին հարվածումՓոխարկիչի ցիկլային աշխատանքը, CRS-ի արագացմամբ, CRS խցիկում իներցիայի կենտրոնախույս ուժերի ազդեցությամբ, կատարվում է մեխանիկական աշխատանք լիցքավորված լարումը միմյանցից հեռացնելու համար:U 1էլեկտրոդներ.
Հեղուկ էլեկտրոդի ճառագայթային շարժումը կենտրոնական ձողային էլեկտրոդից դեպի խցիկի ծայրամաս՝ որպես փոփոխական հզորության կոնդենսատոր, ձեռք է բերվում։ ավելի բարձր ելքային լարում U 2էլեկտրոդների միջև վերջավոր առավելագույն հեռավորության վրա: Այս դիրքում կոնդենսատորը լիցքաթափվում է բեռին առաջին ցիկլում ավելացված ազատ էլեկտրական էներգիայի արժեքով:
Միևնույն ժամանակ, ինչպես GB-1998 տարբերակում, այնպես էլ GB-2011 մոդիֆիկացիայում CRS արագացման առաջին ցիկլում, ազատ մեխանիկական էներգիան արտադրվում և կուտակվում է հեղուկի իներցիոն զանգվածով. GB-1998 սխեմայի տարբերակում հեղուկ աշխատանքային հեղուկի զանգվածի ձգման մեխանիկական էներգիան կենտրոնից դեպի ծայրամաս իներցիայի կենտրոնախույս ուժերի ազատ աշխատանքով կուտակվել է օդաճնշական զսպանակով. էլեկտրաստատիկ դաշտի ուժ) Հեղուկ էլեկտրոդային զանգվածի Կուլոնի ձգողական ուժերը դեպի կոնդենսատորի կենտրոնական էլեկտրոդ:
Երկրորդ հարվածումփոխարկիչի շահագործումը, CRS-ի արգելակման ժամանակ, Կուլոնյան ուժերի ձգողականության ազատ աշխատանքը, հեղուկ էլեկտրոդը վերադառնում է իր սկզբնական դիրքին, էլեկտրոդների և կոնդենսատորի միջև նվազագույն հեռավորությունը կրկին լիցքավորվում է լարման արտաքին էներգիայի աղբյուրից:U 1.Երկհարված ցիկլը ավարտվել է, փոխարկիչը պատրաստ է շահագործման հաջորդ ցիկլին:
Միևնույն ժամանակ, ինչպես GB-1998 տարբերակում, GB-2011 մոդիֆիկացիաներում, այնպես էլ երկրորդ ցիկլում «թռիչքի արգելակումը էլեկտրական գեներատորի դիմադրությամբ բեռի տակ», առաջին ցիկլում ծախսվել է թռչող անիվը պտտելու համար. CRS էլեկտրական շարժիչով, արտաքին հոսանքի աղբյուրի էլեկտրական էներգիան ապաքինվել և հեղուկ զանգվածի կողմից կուտակված մեխանիկական էներգիան, որն ավելացել է առաջին ցիկլում փոխակերպվում է շրջելի էլեկտրական մեքենայի միջոցով(էլեկտրական գեներատոր) կենտրոնական ջեռուցման համակարգով ընդհանուր լիսեռի միջոցով (նկ. 4) անվճար էլեկտրաէներգիա.
GB-1998 սխեմայի տարբերակում երկրորդ ցիկլում օդաճնշական զսպանակի կողմից կուտակված մեխանիկական էներգիան ծախսվել է տեղաշարժի աշխատանքի վրա. զանգվածներըհեղուկ ծայրամասից մինչև կենտրոն: GB-2011 սխեմայի տարբերակում Կուլոնի էլեկտրաստատիկ դաշտի ուժգնության ներուժով կուտակված մեխանիկական էներգիան նույնպես ծախսվում է շարժման աշխատանքի վրա: զանգվածներըհեղուկ ծայրամասից կենտրոն: «GB» սխեմայի երկու տարբերակներում էլ հեղուկ աշխատանքային հեղուկի զանգվածը ծայրամասից կենտրոն տեղափոխելու աշխատանքը առաջացնում է Coriolis ուժերի ազդեցությունը երկայնքով: ինքնագլորվող թռչող անիվ-CRS.
GB-2011 սխեմայի տարբերակում Կուլոնի էլեկտրաստատիկ դաշտի ուժի ներուժով կուտակված մեխանիկական էներգիան, Կորիոլիսի ուժերի աշխատանքը վերածվում է. պտտման աճող կինետիկ էներգիա Flywheel-CRS և, փոխանցվելով էլեկտրական գեներատորով ընդհանուր լիսեռ-CRS-ի միջոցով, վերափոխվում է ճանճ-CRS-ի պտտման մեխանիկական էներգիան. անվճար էլեկտրաէներգիայի մեջ:
Այսպիսով, «GB-2011-converter» գյուտը (փոփոխություն «GB-1998») առաջացնում է նույնքան անվճար ռոտացիայի մեխանիկական էներգիա flywheel-CRS, բայց ավելի արդյունավետ կերպով կուտակում է այն և վերածում էլեկտրականության: Եթե GB-1998-ում կենտրոնախույս ուժերի ազատ աշխատանքից ստացված էներգիայի մի մասը, երբ այն օգտագործվում էր օդաճնշական կուտակիչով, ծախսվում էր սեղմվող գազի տաքացման վրա (այդ ջերմության հետագա ճառագայթմամբ շրջակա միջավայր), ապա երբ ներուժը. Կուլոնյան ուժի էլեկտրաստատիկ դաշտը կուտակվում է, նախկինում կորցրած էներգիան այժմ փոխարկիչի կողմից վերածվում է EMF-ի: Օգտագործելով GB-K գեներատորը, սպառողը ստանում է անվճար էլեկտրաէներգիայի ընդհանուր քանակը, որը համատեղ արտադրվում է շրջելի էլեկտրական մեքենայի և փոխարկիչի միջոցով:
Տեղեկանք .
ՆԲ Հատուկ GB-K նախագծում շրջելի էլեկտրական մեքենան կարող է փոխարինվել շարժիչ-գեներատոր միավորով, որն ավելի արդյունավետ է արդյունավետության տեսանկյունից:
Մի փոքր տեսություն տիպիկ փոխարկիչների մասին:
Կան մի քանի տեսակներ էներգիայի փոխարկիչներօգտագործելով էլեկտրաստատիկ ինդուկցիայի բնական ազդեցությունը, որը վերածել մեխանիկական էներգիան էլեկտրական էներգիայի միջոցով հզորության փոփոխություններլիցքավորված կոնդենսատոր: Կարելի է հաշվարկել կոնդենսատորի էներգիայի պաշարը պարզ բանաձեւով՝ W=Q 2/(2C). Այս հարաբերությունից մենք կարող ենք եզրակացնել. եթե կոնդենսատորի հզորությունը Գավելանում է, իսկ կուտակված լիցքը Քմնում է անփոփոխ (անփոփոխ, երբ կոնդենսատորն անջատված է էլեկտրամատակարարումից), ավելանում է կոնդենսատորի վրա պահվող էներգիան։ Այսինքն՝ այս սկզբունքով գործող մեխանիկական սարքը դեր է խաղում DC գեներատոր.
Փոփոխությունկոնդենսատորի հզորություն մեխանիկորենհնարավոր է տարբեր ձևերով: Հարթ կոնդենսատորի բանաձևից [ C=eS/d] ցույց է տալիս, որ հզորությունը կախված է երեք մեծություններից՝ թափանցելիությունից [ ե] դիէլեկտրիկ թիթեղների միջև, մեկ ափսեի մի կողմի մակերեսը [ Ս] և թիթեղների միջև հեռավորությունը [ դ]։ Փոխելով այս պարամետրերից մեկը կամ մի քանիսը, հնարավոր է մեխանիկական էներգիան վերածել էլեկտրական էներգիայի:

Նկարը ցույց է տալիս սարքի շահագործման սխեմատիկ դիագրամ, բնորոշմեխանիկական DC փոխարկիչ, որն օգտագործվում է հասնել տեխնիկական էֆեկտի հաճախ օգտագործվում է արդյունաբերական պրակտիկայում, բնական երևույթ, ֆիզիկական ազդեցություն «էլեկտրոստատիկ ինդուկցիա».
Տիպիկ մեխանիկական փոխարկիչում ցածր մուտքային լարումU 1վերածվել է ավելի բարձր ելքային լարմանU 2, մինչդեռ ելքային հոսանքն ու մուտքային հոսանքը նույնն են, և, համապատասխանաբար, ելքային հզորությունը գերազանցում է մուտքային էլեկտրաէներգիան։
Տիպիկ պտտվող փոխարկիչում, երբ մեկ ռոտորային էլեկտրոդը նայում է գետնի հատվածին ներքևի մասում, նրանք ձևավորում են լարման լիցքավորված կոնդենսատոր:U 1ներքևի շարժվող կոնտակտի միջոցովբ 1. Երբ ռոտորը պտտվում է, ռոտորի լիցքավորված էլեկտրոդը բացվում է շփման հետբ 1և տեղափոխվում է վերին դիրք: Այս պտույտին հակադրվում են ձգողական ուժերըF rցույց է տրված նկարում Երբ լիցքավորված էլեկտրոդը դիպչում է վերին կոնտակտինբ 2, ավելի բարձր լարման ազդեցությամբ հնարավոր է արդյունահանել դրա կրած լիցքը U 2, քանի որ հողակցված էլեկտրոդի հեռավորությունը մեծացել է, և դրանց փոխադարձ հզորությունը նվազել է:
Էլեկտրակայան «Գեներատոր Բոգոմոլով - Օդափոխիչ
կամ ջուր բարձրացնելու սարք (GB-E)"
Ես ամուսնացա անհատույց ճնշում ձևավորելու գաղափարի հետ ( հազվադեպություն) կենտրոնախույս ուժերը ԳԲ սխեմայում՝ լողացողները մինչև հատակը ցածր գնով ընկղմելու կամ էժան աշխատանքի DA (օդափոխիչի) սխեմայի գաղափարով։ կոմպրեսորօդանավ. Այստեղ GB-E-ն հանդես է գալիս որպես կոմպրեսոր:
Հիշեք «օդաճնշական-հիդրավլիկ CRS» միավորի սխեման (տես GB-K-ի մասին նշումը)

Եվ եկեք հիշենք էլեկտրակայան-Airlift-ի սխեման (շարժիչով, որը հոսում է հեղուկը օղակաձև խողովակի միջով Archimedean շարժիչով (ԱՅՈ), որտեղ խողովակի վրա ինդուկտիվ է փաթաթված կամ տեղադրված է MHD գեներատոր: Այս սխեմայով փչակ(տես նկար 2-ում «Օդի արտանետում ընկնող հոսքի մեջ» վանդակը) մենք կլրացնենք « փականի տուփ«ԳԲ-ի վրա CRS միավորի սկզբունքով»:

ՑԱԾՐ ԱՐԺԵՔՈՎ կոմպրեսորի գործունակության ապացույցը ԳԲ սխեմայի տեսքով - Սա նույնն է, պարզ. տիպիկ (միշտ վաճառվող) ագրեգացիոն միավոր «շարժիչ-գեներատոր» ցիկլային ռեժիմում «արգելակում է բեռի վրա: գեներատոր» ամբողջությամբ ապաքինվում է Արտաքին էլեկտրամատակարարման ծախսերը արագացման ցիկլում, պտտման և իմպուլսի կինետիկ էներգիայի պահպանման օրենքներին համապատասխան, նույնիսկ ճանճով. բջջային ապրանքների շառավղով. Մեր դեպքում այդ «կշիռները» հեղուկ են։
Նման MIKST նախագծի (GB-E) արդյունավետության ապացույցի մեկ այլ մասն այն է, որ ֆիզիկայի «թեորեմն» այստեղ այլևս չի համապատասխանում իրականությանը: Ըստ թեորեմի՝ Արքիմեդյան ուժերը (հիդրոստատիկ ճնշում) ներթափանցման հարվածում ( խորտակվելով) լողում է (օդային փուչիկները) դեպի ներքև (դեպի օդափոխիչի խողովակի խորությունը), ենթադրաբար, միշտ իրենց հակազդեցության աշխատանքով վերակայում է հետագա օգտակար աշխատանք թռուցիկլողում է. Եվ եթե CRS միավորը «խեղդում է» օդային փուչիկները (լողում) ոչնչի համար? Ի վերջո, թռչող անիվի արագացման հարվածի էլեկտրաէներգիան գրեթե ամբողջությամբ վերականգնվում է աշխատանքճնշում խորության վրա արգելակման հարվածում կենտրոնախույս ուժերի կողմից խրված զսպանակի անալոգիայով:
Այո, գրավիտացիոն դաշտում Արքիմեդյան ուժերի ազատ աշխատանքով GB-E սարքը կստացվի մեծ, բայց էժան: Նախ, աշխատասեղանի էժան փորձի համար դա տեղի կունենա: Երկրորդ, դա օգտակար կլինի խորքային հորերի համար, կամ օֆշորային հարթակի համար, որտեղ, օրինակ, նավթը պետք է մղվի։ Դուրս հանելու համար նման ջուրը բարձրացնող սարքը շատ օգտակար է։ ջուր տիղմով կոյուղու մաքրման կայաններում կամ այնտեղից ջուր հանելու համար հանքային ցեղատեսակ ՀԱՆՔԵՐԻՑ. Այսինքն՝ ամենուր, որտեղ այսօր ԱՐԴԵՆ աշխատում են ավիաուղիները, բայց դեռ ԹԱՆԿ են աշխատում։ Եվ մենք նրանց տալիս ենք անվճար բարձրանալ վերև:
Նույնիսկ Malyutka տիպի կենցաղային սուզվող մինի-պոմպերի արտադրողները պարտավոր են հետաքրքրվել GB-E-ի գաղափարով:
Այսօր Խարկովում և Ղրիմում կան կեղտաջրերի մաքրման կայանների համար պլաստիկ օդանավերի հեղինակավոր արտադրողներ: Սրանք մեր պոտենցիալ գործընկերներն են, ֆինանսավորվում են քաղաքապետարանների կողմից։ Ո՞վ է իրենց հետ բանակցելու, ԳԲ-Է-ի մասին բանակցելու։ Չեմ կարող։
Բայց, գումարած ավելին, երբ օգտագործում եք ճառագայթային Արքիմեդյան ուժեր, տարբերակը «իներցիայի կենտրոնախույս դաշտից դեպի ցենտրիֆուգ»չափերը ընդունելի կլինեն նույնիսկ շարժիչի համար մեքենա. Նկարը ցույց է տալիս պտտվող հարթակ-ցենտրիֆուգը, իսկ սպիտակ եռանկյունները կլինեն TsRS-ի ԱՆՎՃԱՐ կոմպրեսորային փական տուփերը (GB-E սխեմայից)
Այստեղ տեսանելի է նույնիսկ պրեցեսիոն իններկոիդի մղումը: Ինչպես Է.Լինևիչը, միգուցե մեքենան էլեկտրական գեներատորի կարիք չունենա, բայց առանց շարժիչ անիվների նրա քարշի ուղիղ շարժիչ կլինի։

Եվ այսպես, GB-ն Airlift-ի հետ զուգակցելու եղանակը, ըստ էության, TsRS միավորի վերափոխումն է մթնոլորտային ճնշմամբ ներքին խորը հիդրոստատիկ ճնշման օդի շրջանցիկ փականի տուփի: ԲնահյութԽցիկի կենտրոնում արագացման հարվածում ձևավորվում է CRS rarefaction անվճար.Դիզայնի բնութագրերի համաձայն՝ CRS խցիկում վակուումը հավասար է օդափոխիչի խողովակի խորության վրա գտնվող ճնշմանը և համաչափ է թռչող անիվ-CRS-ի պտտման արագությանը: Սա փոքր անկյունային արագություն է, որը տեխնիկապես հասանելի է պարզապես: Բնահյութ TsRS GB-E-ն ցիկլային կերպով գործում է որպես կենտրոնախույս պոմպ(առաջին չափով)

Նկար 4ա-ում ներկայացված է «GB-E»-ի դատարկ CRS խցիկը թիվ 2 հեղուկ փականների և օդային փականների թիվ 1 և 3 համակարգով:

Նկար 4b-ում ներկայացված է կենտրոնական ջեռուցման համակարգի՝ սուզվող կոմպրեսորի «պտտման արագացում» ցիկլը: Կանաչ սլաքները ցույց են տալիս խցիկի «բեռնաթափումը» ջրից կենտրոնախույս ուժերի կողմից և մթնոլորտային օդով լցված դեղին սլաքով: Բնահյութ TsRS GB-E-ն ցիկլային կերպով աշխատում է որպես կենտրոնախույս ջրի պոմպ (առաջին ցիկլում), և մթնոլորտային ճնշումը հավելյալ գումար է վաստակում հաքի համար՝ լցնելով ջրից ազատված տարածքը:

Նկար 4c-ում CRS-ի «արգելակման» ցիկլը, երբ խորության արտաքին ջուրը լցնում է խցիկը (կանաչ սլաքներ) և Coriolis ուժով այն պտտվում է ինքն իրեն (առաջինում ծախսված էլեկտրաէներգիայի գեներատորի կողմից ՎԵՐԱԿԱՆԳՆՄԱՆ գործընթացը ցիկլը շարժիչով), ինչպես նաև ԱՆՎՃԱՐ աշխատում է ինչպես ներսում ստանդարտ սխեմա ԿՈՄՊՐԵՍՈՐ բարձրացում «Airlift» սարքը, որը օդի ոսպնյակը մատնում է դեպի վերև դեպի օդափոխիչի խողովակ: (Օդափոխադրումների երկու սկզբունք կա՝ կամ «փրփուր» կամ «մխոցային ոսպնյակներ»:)
Սա նախնական էսքիզ է, ուղղակի սկզբունք։ Միգուցե, ինչպես նկար 1-ում, պետք է թողնել առաձգական պայուսակ-օդաճնշական զսպանակ... և այլն: Կարող է պահանջվել լրացուցիչ ընդունիչ-օդային զանգ: Դա կհուշեն օդանավերը: Առանց օդափոխության մասնագետների, ավելի լավ է ինքներդ չվերցնեք մոդելը, կա մի նուրբ գործընթաց՝ որտեղ է փրփուրը, և որտեղ են ոսպնյակները… Բայց ես երաշխավորում եմ հեղուկի անվճար DRIVE-ի գործունակությունը հոսքի մեջ: Էժան ու զայրացած:
«Գարնանային ապրանքներ 2011» նշումների ընտրության վերջաբանը
Դուք նայեցիք իմ գրառումները այս գարնանը իմ կողմից առաջարկված նոր սխեմաների նկարագրությամբ, իբր գերմիասնական սարքեր, «երկրորդ տեսակի հավերժական շարժման մեքենաներ» սարքի համակարգ և շրջակա միջավայրի բնական էներգիայի համակարգը:
Ինչպես ես ասացի այս նոտաների ընտրության նախաբանում, բնության մեջ մեզ հայտնի բոլոր ուժերը բնական «մեքենաների» աշխատանքի արդյունք են, բնության կողմից կառուցված մեխանիզմների աշխատանքը մեկ համընդհանուր սկզբունքով: Մասնավորապես, շարունակական փոխանակման սկզբունքը էներգիաշրջակա միջավայրում, որպես ամբողջության օպտիմալ էներգիայի հաշվեկշռի «ավտոմատ» վերականգնման միջոց, պարամետրի տեղային խախտման դեպքում». էներգիայի խտությունը ծավալով » բոլոր հայտնիների ճառագայթային էներգիայի խտության գրադիենտներում դաշտերըպահպանողականի պոտենցիալ էներգիա ուժերը.
Ձեր ուշադրությանն առաջարկված իմ կողմից հորինված միացումային դիագրամներում գեներատորներն օգտագործվում են որպես ազատ բնական էներգիայի աղբյուրներ։ սխեման Այս «մեքենաների» սարքերը, որոնք բնության կողմից նախագծված են տիեզերական համակարգի էներգիայի հաշվեկշռի «ավտոմատ» հավասարեցումն իր ենթահամակարգերում իրականացնելու համար, նույնական են և ունիվերսալ: Տիեզերքի խիտ փաթեթավորված նյութական նյութում (եթերի բարակ նյութը, այս բարակ նյութից գոյացած նյութական առարկաների խաղային նյութի ֆիզիկական վակուումը) կան տեղային գոյացություններ՝ կազմված նյութից և նրանց կողմից ձևավորված ուժային դաշտերից։ Ուժերի նման դաշտերը ընդունված է անվանել «պոտենցիալ էներգիայի դաշտեր», իսկ այդ ուժերը կոչվում են «պահպանողական ուժեր»։
Ըստ հեղինակի, այս բոլոր բնական «մեքենաների» դասավորության մեջ սխեմաների միասնությունը կայանում է նրանում, որ ուժերի աշխատանքի դրսևորման և իրականացման համար նրանց «ուժային միավորը» ի սկզբանե տրված ճառագայթային գրադիենտի սկզբունքն է։ էներգիայի խտությունը և նյութական նյութի զանգվածն ըստ ծավալի. Այս «էներգաբլոկում», որը կոչվում է «պոտենցիալ էներգիայի դաշտ», մենք կարող ենք մտովի նշանակել էներգիայի քվանտացված խտության մակարդակների ոլորտների հավասար պոտենցիալ մակերեսները ընդունված հղման շրջանակում:
Հեղինակի կողմից առաջարկվող արհեստական սարքերի սխեմաներում սեփական աշխատանքային մարմինների փոխազդեցությունը բնական միջավայրի հետ իրականացվում է OPORA-ի միջոցով: գրադիենտ միջավայրի նյութի խտությունը պոտենցիալ էներգիայի դաշտերում. միջավայրի զանգվածի ձգողականության դաշտում, իներցիայի կենտրոնախույս ուժերով միջավայրի զանգվածի ձգման դաշտում, ձգողականության դաշտում. Էլեկտրաստատիկ Կուլոնյան ուժերով միջավայրի զանգվածը: Այս պոտենցիալ էներգետիկ դաշտերը ձևավորվում են ԱՌԱՋՆԱԿԱՆ բնական ուժերով, և նրանք իրենց «ուժային միավորներով» շրջակա միջավայրի ներգրավված զանգվածում ստեղծում են երկրորդական բնական ուժեր՝ «վերադարձող» ուժեր։ Հենց վերականգնող ուժերի աշխատանքով է իրականացվում համակարգերի էներգետիկ ներուժի «ավտոմատ» դասավորվածությունը, իրականացվում է համընդհանուր էներգափոխանակության տեղական հոսքերի վերաբաշխում։
Բոլոր սխեմաները կառուցված են գերմիավորների (SE) նախագծման «Ունիվերսալ մեթոդի» հեղինակի կողմից առաջարկված «AUM» ալգորիթմի միջոցով: կազմակերպել և վերաբաշխել էներգիայի փոխանակման հոսքերը շրջակա միջավայրի և սարքի միջևայս փոխանակման էներգիայի մի մասն օգտագործելու համար:
AUM-ը բուծվում է որպես հետևանք«Ֆիզիկայի M-Paradigms»-ի հեղինակային տարբերակից։
AUM- գյուտի գործընթացի կազմակերպում (ՏՐԻԶ-ի անալոգիայով) և պոտենցիալ էներգետիկ դաշտերի էներգիան օգտագործելու համար սարքերի սխեմատիկ դիագրամների նախագծում. ձևակերպված է այսպես.
Եթե սարքում ցիկլային կերպով օգտագործվում են պահպանողական ուժերի պոտենցիալ էներգիայի երկու ձևեր, որոնց աշխատանքն ունի վեկտորների գործողության հակառակ ուղղությունը, ապա այն ցածր գնով է՝ պարբերաբար անջատելով (թուլացնելով) դաշտի գործողությունը։ էներգիայի ուժային ձև և միացնելով (ուժեղացնելով) էներգիայի այլ ձևի ուժերի դաշտի գործողությունը, հնարավոր է (!) ժամանակի և տարածության մեջ ձևավորվել. դրական տարբերությունայս ուժերի գործողությունների լիազորությունները՝ դա հեռացնելու համար հզորության տարբերություն, այսինքն՝ ստանալ օգտակար էներգիա անվճար էներգիա սպառողի համար։ Գյուտարարը դրան հասնում է հայտնի ֆիզիկական էֆեկտների ընտրության միջոցով:
AUM-ի՝ CE սարքերի դիզայների ամենաընդհանուր տեխնիկայի օգտագործումը հեղինակից պահանջում է ստեղծագործական ջանքեր գործադրել յուրաքանչյուր կոնկրետ սխեմայի մեջ: ցածր գին սարքի բնական հակադիր ուժերից մեկի գործողության անջատում (թուլացում):
Այսպիսով, «EMGDG» գյուտի մեջ (ՌԴ արտոնագիր No 2396681), որի գործողության սկզբունքը, ներառյալ. քննարկվել է առաջին գրառման մեջ «Ուրիշ ինչ ...», ցածր գինԼողերի «խորտակման» մեթոդը (Արքիմեդյան ուժերի թուլացում) հայտնաբերվում է ֆիզիկական էֆեկտում. «Հսկիչ զանգվածի վրա ձգողականության ուժի արժեքը փոխվում է նրա ուղղահայաց շարժման ընթացքում՝ իր հղման շրջանակի հետ միասին»։
Նույնը վերաբերում է կենտրոնախույս ուժերի դաշտում գտնվող EMGDG տարբերակին, որտեղ «կենտրոնախույս ուժերի գործողության ուժի մեծությունը հսկիչ զանգվածի վրա փոխվում է նրա շառավղային շարժման ընթացքում՝ իր հղման շրջանակի հետ միասին»:
Նույն գտածոն օգտագործվում է «Արքիմեդյան շոգեմեքենա-օդափոխիչ» սխեմայում և «ԳԲ-Ե» սխեմայում։
Արքիմեդյան շոգեշարժիչի Արսենտիևի հորձանուտի ջրային շիթում հայտնաբերվել է հիդրոստատիկ ճնշման ուժերի աշխատանքի շնորհիվ հզորության բարձրացման ևս մեկ միջոց։
Clem շարժիչի շահագործման սկզբունքի մասին վարկածում ցածր գինԿենտրոնախույս ուժերի գործողությունը ցիկլային կերպով թուլանում է Carnot ջերմային ցիկլի օգտագործման տեխնիկական մեթոդով, որը ձեռք է բերվում հեղուկի ադիաբատիկ ընդլայնման ներքին էներգիայի ցիկլային օգտագործման և արտաքին միջավայրի կողմից դրա սառեցման շնորհիվ:
Bogomolov Generator ընտանիքի սարքերում, GB-1998, GB-K, GB-E ցածր գինՊտտման ազատ կինետիկ էներգիա (մեխանիկական էներգիա) առաջացնելու համար կենտրոնախույս ուժերի գործողությունը անջատելու մեթոդը ձեռք է բերվում CRS թռչող անիվի միավորի ցիկլային արագացման և դանդաղեցման ռեժիմը սահմանելու միջոցով: ԳԲ-Այս ֆունկցիան իրականացվում է խոր հիդրոստատիկ ճնշման միջոցով. նաև նախագծել երկու հակադիր ուժերից մեկի գործողությունը թուլացնելու (անջատելու) մեթոդներ:
Ես շատ կուզենայի ամփոփել «այն, ինչ պահանջվում էր ապացուցել» բառերով, բայց, ցավոք, առանց հորինված սարքերի աշխատանքային մոդելների, այս բոլոր «նախաբաններն» ու «հետևյալները» առայժմ մնում են «ունայնություն»:
Ձմեռը անցավ, ամառը եկավ, շնորհակալություն երեկույթի համար:
Գլուխ 4 Կենտրոնախույս ուժ
Ռուսաստանի արտոնագրային բյուրոն, ինչպես գիտեք, չի ընդունում արտոնագրի հայտերը, եթե նկարագրում է «ներքին ուժերի պատճառով տեղաշարժը»։ Սա ճիշտ է, բայց չպետք է մոռանալ, որ բոլոր մարմինները մշտական փոխազդեցության և էներգիայի փոխանակման մեջ են եթերի հետ, իսկ իներցիայի ֆենոմենը եթերոդինամիկ բնույթ ունի։ Այս գլխում մենք կքննարկենք մի քանի պարզ լուծումներ, որոնք թույլ են տալիս շարժում ստանալ շրջապատող եթերային միջավայրի հետ փոխազդեցության միջոցով:
Cassier's Magazine Volume 29-ում, 1906 թվականին, ցուցադրվեցին մի քանի սխեմաներ, որոնցում ենթադրվում է օգտագործել ռոտորի հատուկ երկրաչափությունը՝ գազի կամ այլ առաձգական միջավայրի ասիմետրիկ ներքին ճնշում ստեղծելու համար, որն առաջանում է, երբ այն պտտվում է: Նշենք, որ Լուի Կասիեն 1891-1913 թվականներին (ավելի քան քսան տարի անընդմեջ) տպագրել է հետաքրքիր հոդվածներ տեխնոլոգիայի զարգացման վերաբերյալ։ Նրա շնորհիվ այն ժամանակվա գյուտարարների շատ գաղափարներ այժմ մեզ հայտնի են։ Նրա ամսագրի անգլերեն լեզվով անվճար արխիվները կարելի է գտնել ինտերնետում: Սխեման ցուցադրված է նկ. 28, ըստ Cassier's Magazine-ի տեղեկությունների, որը հանրությանը առաջարկվել է 1902 թ.
Բրինձ. 28. Ռոտորը լցված է գազով կամ այլ առաձգական միջավայրով
Մարմնի չորս տարրերից (ճառագայթներից) յուրաքանչյուրը հագեցված է օդի կամ որոշ գազի մեջ փականով: Սարքը չի սկսում ինքնուրույն պտտվել: Սկսելու համար այն պետք է ձեռքով պտտել: Այս գյուտի հեղինակը մեզ դեռ հայտնի չէ։ Սխեման շատ խոստումնալից է և չունի անալոգներ դիզայնի պարզության առումով:
Հաշվի առեք ոլորող մոմենտ ստեղծելու պայմանները: Ենթադրենք, մարմնի չորս «ճառագայթների» ներսում գազ կա, կամ մեկ այլ առաձգական աշխատանքային մարմին,իներցիոն զանգված ունեցող. Այստեղ էական է աշխատանքային հեղուկի առաձգականության գործոնը, որը կենտրոնախույս ուժի ազդեցությամբ անհավասարաչափ կսեղմվի։ Անսեղմելի հեղուկը, այս իրավիճակում, չի տա ակնկալվող ազդեցությունը, քանի որ այն նույն ուժով մղելու է բոլոր ուղղություններով։ Ճզմվող առաձգական աշխատանքային հեղուկը անհավասար կերպով սեղմում է պատյանը՝ հիմնականում պտտման շառավիղով:
Վեկտորային սխեման ներկայացված է նկ. 29, որտեղ նշվում է շոշափող բաղադրիչի առկայությունը, որը որոշում է մեքենայի ռոտորի պտույտը:
Բրինձ. 29. Ուժային վեկտորների տեղակայման սխեման
Նկ. 29, կարելի է ենթադրել, որ սեղմվող առաձգական «աշխատանքային զանգվածը» ավելի մեծ ուժով կսեղմի մարմնի շոշափող կողմերին, քան շառավղայիններին, ինչը կստեղծի ոլորող մոմենտ և ռոտորի մշտական արագացում։
Այս սխեմայի գործունակությունը կարող է հիմնավորվել միայն շրջապատող առաձգական միջավայրում առաձգական աշխատանքային մարմնի դեֆորմացիաներին արձագանքի առկայությամբ: Այս դեպքում այս սարքի լիսեռի ոլորող մոմենտը պետք է համարժեք լինի շրջապատող եթերային միջավայրը այս սարքի շահագործման տարածքում «ոլորելու» ազդեցությանը:
Թույլ տվեք փոխել նկ. 29, և առաջարկեք ավելի շատ «ճառագայթներ», նկ. 30. Սա կարևոր չէ, բայց սնամեջ մարմնի «օգտակար» մակերեսը, որը ստեղծում է ուժի շոշափող բաղադրիչը, մեծացված է այս ձևավորման մեջ։ Հուսով եմ, որ դուք ծանոթ եք Արևի այս հին սլավոնական խորհրդանիշին:
Բրինձ. 30. Ռոտոր 8 ճառագայթով
Սարքը ցույց է տրված նկ. 31, առաջարկված է իմ կողմից օդատիեզերական համակարգերի էներգամատակարարման և շարժման ոլորտում գործնական կիրառման համար:
Բրինձ. 31. Ֆրոլովի ռոտորային տարր. Ցուցադրված են ուժի առանցքային և շոշափող բաղադրիչները
Այս դեպքում կարելի է ակնկալել ուժի ոչ միայն շոշափող բաղադրիչի դրսևորում, այլև դրա առանցքային բաղադրիչը։ Առանցքային բաղադրիչի առկայությունը հնարավորություն է տալիս ստանալ առանցքային շարժիչ (բարձրացնող) ուժ։
Նկ. 32-ը ցույց է տալիս ռոտորի մարմնավորումը, որի պինդ սկավառակի արտադրությունը պահանջում է եռանկյունաձև (պարզ դեպքում) խոռոչների մանրացում՝ առաձգական և սեղմվող «աշխատանքային զանգվածի» համար։ Իհարկե, անհրաժեշտ է ևս երկու հերմետիկ կափարիչ։ Հնարավոր է ֆրեզեր կատարել պտտման առանցքի նկատմամբ թեքությամբ (ըստ նկ. 91-ում ներկայացված գաղափարի), որպեսզի ստացվի շարժիչ ուժի ոչ միայն շոշափող, այլև առանցքային (բարձրացնող) բաղադրիչ։
Բրինձ. 32. Ռոտոր՝ խոռոչի ֆրեզմամբ
Արդյո՞ք այս գաղափարը «ներքին ուժերի կողմից շարժման» ֆանտազիա է, թե՞ գործնականում օգտակար տեխնոլոգիա է: Նկ.-ում ներկայացված գաղափարների արդյունավետության հարցը: 28 - նկ. 32-ը կարելի է ստուգել գործնական եղանակով, քանի որ այս ձևավորումները պարզ են, և առաձգական աշխատանքային իներցիոն զանգված ընտրելու շատ տարբերակներ կան: Առաջարկվում է համատեղ փորձարկումներ անցկացնել, դիմել արտոնագրի համար և սկսել այս տեխնոլոգիայով էներգիայի աղբյուրների արտադրությունը։
Հրապարակելով այս գաղափարները՝ ես ենթադրում եմ դրանց հաջող առևտրայնացումը և ցանկալի է՝ իմ մասնակցությամբ։ Ծրագրի հետագա զարգացումը կախված է ձեր արտադրական հնարավորություններից: Սկզբից մեզ անհրաժեշտ է փոքր փորձնական գործարան՝ մշակման աշխատանքների ընթացքում այս տեխնոլոգիան բարելավելու հիմնական գործոնները բացահայտելու և զանգվածային արտադրության գործընթացում այն օպտիմալ կերպով կիրառելու ուղիներ գտնելու համար: Լրացուցիչ մանրամասների համար այս և այլ նախագծերը ներկայացված են իմ «Նոր տիեզերական տեխնոլոգիաներ» գրքում, 2012 թ.
Անցնենք ռեակտիվ էֆեկտով կենտրոնախույս մեքենաներին, այսինքն՝ Ալեքսանդրիայի Հերոնի տուրբինի անալոգներին։ Սխեման ներկայացված է նկ. 33. «Պնևմատիկա» տրակտատում՝ մ.թ.ա. մոտ 120 թվականին, Հերոնը նկարագրել է ռեակտիվ ազդեցության պատճառով սեղմված օդի կամ գոլորշու շարժիչով տարբեր մեքենաներ: Օրինակ, Հերոնի «էոլիպիլը» գնդակի տեսքով առաջին գոլորշու տուրբինն էր, որը պտտվում էր ջրի գոլորշու շիթերի ուժով, որոնք արտանետվում էին շոշափելիորեն տեղակայված վարդակներից բարձր ճնշման տակ:
Բրինձ. 33. Հերոնի Ալեքսանդրիայի տուրբին
Heron տուրբինն օգտագործում է գոլորշու ճնշում, ինչպես ժամանակակից գոլորշու և այլ գազատուրբինային մեքենաները, որոնց վրա հիմնված է ժամանակակից էներգիան: «Գոլորշու ճնշում» - այս կարևոր բառերը ամուր նստած են բոլոր էներգետիկների և լոկոմոտիվների վարորդների մտքում: Ճնշում ստեղծելու համար հարկավոր է ջուրը տաքացնել, այսինքն՝ այրել գազ, ածուխ, մազութ։ ապա էլեկտրական գեներատորի տուրբինը կպտտվի։ Էներգետիկ պարոնայք, ձեզ խաբում են։ Ճնշումը, կենտրոնախույս ուժի արդյունքում, ստեղծվում է առանց վառելիքի, գրեթե ոչինչ: Սա հայտնի է հազարավոր տարիներ, բայց ձեզ դա չեն ասել: կամ մոռացել ես:
Մոտ 1760 թվականին Յոհան Անդրեաս ֆոն Սեգները հորինել է շարժիչը, որը հիմնված է հոսող ջրի ռեակտիվ գործողության վրա: (Յոհան Անդրեաս ֆոն Սեգներ):Սեգներն իր առջեւ խնդիր չի դրել ձեռք բերել ինքնավար աշխատող մեքենա։ Նա կիրառեց կենտրոնախույս ուժի կիրառման մեթոդը՝ արագացնելու ջրաղացի ռոտորը՝ մի մեքենա, որն օգտակար աշխատանք էր տալիս, երբ դրսից ջրի հոսք էր մատակարարվում դրան։ Սակայն նրա գաղափարի էությունն այն է, որ մեքենայի հզորությունը կախված է ոչ միայն ջրի հոսքի կինետիկ էներգիայից։ Նման մեքենայում ցանկացած շիթային ճնշում կարող է ստեղծվել ելքի վրա, քանի որ այն մեծանում է ռոտորի արագության աճով. կենտրոնախույս ուժը արագացնում է աշխատանքային զանգվածը և ստեղծում բացասական ճնշման (վակուում) ազդեցություն դեպի ռոտոր հոսքի մուտքի մոտ։ . Ճնշման անկումը մեծանում է. Սա հանգեցնում է ավելորդ հզորության: Առաջարկվող շատ կենտրոնախույս մեքենաներ հիմնված են «Segner անիվի» ընդհանուր սկզբունքի վրա։ Սեգների «արդիականացված» անիվի ինքնաշարժի ռեժիմը կարելի է պարզորոշ կերպով պատկերացնել, ինչպես ցույց է տրված Նկ. 34.
Բրինձ. 34. Segner ռոտոր. Ջուրը մտնում է պտտման առանցքով
Կարևոր նրբերանգներ. Նախ, պայմանով, որ կնքված համակարգ, իսկ ջուրը ճնշման անկման պատճառով ինքնուրույն մտնում է ռոտոր, և պոմպով չի մղվում, այդպիսի ռոտորն ինքնարագանում է այնքան ժամանակ, քանի դեռ ջուրը մտնում է այնտեղ։ Կենտրոնում, առանցքի երկայնքով, ջրի հոսքը շարժվում է ավելի ցածր արագությամբ, քան ելքի մոտ, ուստի մուտքի մոտ խողովակի խաչմերուկը պետք է լինի ավելի մեծ, քան բոլոր վարդակների ընդհանուր խաչմերուկը: Նշենք, որ ոլորող մոմենտից բացի, դիզայնում ստեղծվում է զույգ էֆեկտ՝ առանցքային մղում:
Մեկ այլ կառուցողական նրբություն. աշխատանքային հեղուկը պետք է սեղմելի լինի. Ալգորիթմը ներառում է սեղմման փուլեր՝ կենտրոնախույս ուժերի և ընդարձակման հետևանքով, մինչդեռ համակարգում առաջանում է լրացուցիչ կինետիկ էներգիա՝ սեղմման պոտենցիալ էներգիայի ազատման պատճառով։ Հոսքի կինետիկ էներգիայի աճը կարող ենք օգտագործել տուրբինային շարժիչների վրա կամ այլ կերպ։ Այս պայմանները կատարելու համար անհրաժեշտ է թույլ տալ, որ ջուրը արագանա շարժման ընթացքում կենտրոնախույս ուժերի ազդեցության պատճառով: Տեսաբանները նրա շարժման օպտիմալ հետագիծն անվանում են փոփոխական շառավղով լոգարիթմական պարույր, որը ցույց է տրված Նկ. 35.
Բրինձ. 35. Լոգարիթմական պարույր
Որոշ ժամանակակից կենտրոնախույս պոմպեր և օդափոխիչներ արդեն ունեն սայրերի նման ձևավորում կամ աշխատանքային զանգվածի շարժման հետագիծ, ուստի դրանք շատ արդյունավետ են: Պարզեցված տարբերակում ջրի զանգվածի շարժումը հարթ կամ կոնաձև պարույրի երկայնքով շառավղով ցանկացած աճով ջրին տալիս է արագացման և ռոտորի համար լրացուցիչ ոլորող մոմենտ ստեղծելու ունակություն:
Միգուցե օդի օգտագործումը որպես աշխատանքային զանգված ավելի հեշտ կլինի, բայց այն շատ ավելի թեթև է, ուստի պտտման արագությունները շատ ավելի բարձր կլինեն, և դա կպահանջի պտտվող մեքենայի մասերի բարձրորակ արտադրություն և մարմնի մշակում (հղկում): Տեսականորեն ամեն ինչ այնքան էլ բարդ չէ։
Դիտարկենք այս սկզբունքներին համապատասխան գործող տեխնիկական սարքի ներդրման ամենահայտնի և հուսալի օրինակը՝ Clem շարժիչը, որն օգտագործում է կենտրոնախույս ուժ՝ ինքնապտույտի համար։ 1972 թվականին Ռիչարդ Քլեմն աշխատել է որպես ծանր տեխնիկայի օպերատոր ԱՄՆ Դալլաս քաղաքում։ Նա նկատեց, որ սովորական տաք ասֆալտի սրսկիչը շարունակում է պտտվել ևս մեկ ժամ այն բանից հետո, երբ այն անջատվել է: Նման մեքենայի առանցքը ուղղահայաց է, իսկ ռոտորն ունի կոնաձև ձև: Կլեմը չգիտեր տեսությունը, նա սկսեց էմպիրիկորեն ուսումնասիրել հարցը և կառուցեց ինքնապտտվող «Կլեմ շարժիչ»: Նկ. 36-ը ցույց է տալիս նման գեներատորի սխեմատիկ դիագրամ, որը կարող է կենտրոնախույս ուժ կիրառել հեղուկ զանգվածը կոնաձև ընդարձակվող ճանապարհով տեղափոխելու համար:
Բրինձ. 36. Clem գեներատորի միացման սխեմայի տարբերակ
Սա Կլեմի օրիգինալ սխեման չէ, այլ նրա գաղափարի կառուցողական կատարման տարբերակ։ Նկ. 37-ը ցույց է տալիս այս դիզայնի մեկ այլ սխեմատիկ դիագրամ: Կոնաձև ռոտորը տեղադրված է կոնաձև պատյանում և դրա մեջ կտրված է պարուրաձև ալիքներ: Այս պարուրաձև ուղիներն անցնում են կոնի երկայնքով և ավարտվում են դրա հիմքում՝ վարդակների (վարդակների) տեսքով: Նմանատիպ կառույցներ ստեղծելու տեսաբանների և պրակտիկանտների առաջարկություններն այն են, որ անհրաժեշտ է «հեղուկին արմատավորվելու հնարավորություն տալ», քանի որ դրա վրա գործում է կենտրոնախույս ուժ։
Բրինձ. 37 Clem drive-ի շահագործման սկզբունքը. Դիզայնի տարբերակ
Դա անելու համար պարույրը պետք է ունենա աճող շառավղով քայլի բարձրացում, ինչպես նաև ցանկալի է մեծացնել ալիքի խաչմերուկը, որով հեղուկը հոսում է, երբ մոտենում է վարդակին: Սա չի նշվում Clem շարժիչի մասին հոդվածներում, բայց տեսականորեն ենթադրվում է:
Պարույր խողովակը, որի երկայնքով շարժվում է աշխատանքային հեղուկ զանգվածը, ունենալով բարձրության և խաչմերուկի աճ, քանի որ պտտման շառավիղը մեծանում է, կոչվում է «անտիլոպի եղջյուր»:
Այստեղ կան մի քանի գործոններ. Բանը միայն ռեակտիվ Սեգների էֆեկտի մեջ չէ։ Պարույրով շարժվող հեղուկի արագացումը, ռոտորի հետ փոխազդելով, հանգեցնում է նրան, որ այն փոխանցում է ոլորող մոմենտը ռոտորին։ Ռոտորի մուտքի մոտ հեղուկի արագությունը հավասար է ռոտորի պտտման արագությանը: Վարդակի դիմացի հետագծի հատվածում հեղուկն ավելի արագ է շարժվում, քան ռոտորը (արագության աճը պայմանավորված է կենտրոնախույս էֆեկտով)։ Այսպիսով, ռոտորը արագանում է, և որոշակի ռոտացիայի արագությամբ արտաքին շարժիչը կարող է անջատվել, և մեքենան անցնում է էներգիայի գեներատորի ռեժիմին: Ծանրից դուրս գալուց հետո շիթի կինետիկ էներգիան օպտիմալ օգտագործելու համար նախագծում նպատակահարմար է օգտագործել թեք ռեֆլեկտորներ՝ տուրբինային շարժիչի շեղբեր:
Այսպիսով, այս դիզայնում կան երեք հիմնական ասպեկտներ.
1. Ռեակտիվ Segner էֆեկտը արագացնում է ռոտորը:
2. Հեղուկի արագացումը, եթե կենտրոնախույս ուժի ազդեցությամբ հնարավոր է մեծացնել նրա շարժման շառավիղը, հանգեցնում է նրան, որ այն ավելի արագ է շարժվում, քան ռոտորը, և նրան տալիս է լրացուցիչ ոլորող մոմենտ։
3. Ջրի զանգվածի ռեակտիվ փոխազդեցությունը, որն արդեն դուրս է թռել վարդակից և «աշխատում» է ռոտորի վրա ամրացված տուրբինային շարժիչի հետ, լրացուցիչ արագացնում է դրա պտույտը։
Ռիչարդ Քլեմը սարքեց մեքենա, որն օգտագործում էր Mazola ուտելի ձիթապտղի յուղ, քանի որ շահագործման ընթացքում հեղուկը շատ տաք էր (մինչև +150 աստիճան Ցելսիուս), և ջուրը եռում էր: Երևի պետք է նաև յուղ օգտագործել, քանի որ այս հեղուկն ավելի մեծ առաձգականություն ունի, քան ջուրը։ Կլեմի իրական նախագծման մեջ հեղուկը 300–500 psi (21–35 կգ/սմ2) ճնշման միջակայքում սեղմված սնամեջ լիսեռի մեջ էր, անցնում էր կոնի ամուր պարուրաձև խողովակներով և դուրս գալիս վարդակների միջով։ Սա հանգեցրեց կոնի պտտմանը: Լիսեռի պտտման արագությունը Clem-ի դիզայնում հասել է 2300 rpm-ի: Աշխատանքային հեղուկը սառեցնելու համար օգտագործվել է ջերմափոխանակիչ (ռադիատոր)։
Հայտնի է, որ առաջին շարժիչը չի կարողացել դիմակայել բեռներին, և փլուզվել է։ Կլեմն ավելի դիմացկուն է դարձրել շարժիչի երկրորդ տարբերակը։ Այս տարբերակում շարժիչն ուներ մոտավորապես 350 ձիաուժ հզորություն: և կշռում էր մոտ 90 կգ։
Ռիչարդը իր շարժիչը դրեց մեքենայի վրա և ցույց տվեց իր աշխատանքը ճամփորդությունների ժամանակ: Մարտկոցն օգտագործվել է միայն շարժիչի և մեքենայի լուսարձակների միացման համար։ Ըստ գյուտի հեղինակի՝ էլեկտրակայանը «բաղկացած էր յոթ աստիճանանոց պոմպից (յոթ փուլային պոմպ) և փոխարկիչից»։ Պոմպը, ինչպես նկարագրել է հեղինակը, օգտագործվում էր «պահեստից դեպի փոխարկիչ ճնշման տակ նավթ մատակարարելու համար, որտեղ էներգիան վերածվում էր շարժիչի պտտման համար բավարար ուժի»: Յուղը վերադարձավ տանկ, և աշխատանքային հեղուկի շարժման ցիկլը նորից շարունակվեց։ Փոխարկիչը, այսինքն՝ էներգիայի փոխարկիչը, գործում էր տուրբինի պես, բայց «բառի սովորական իմաստով տուրբին չէր», ինչպես ասում էր Քլեմը։
Բրինձ. 38. Լուսանկարում ձախ կողմում՝ բնօրինակ դիզայնի մանրամասներ։ Աջ - համակարգչային մոդել
Գյուտարարը աջակցություն փնտրեց ֆինանսական և արդյունաբերական շրջանակներում՝ հեշտությամբ համոզելով նրանց այս տեխնոլոգիայի առավելությունների մեջ: Նա մի անգամ ասել է, որ եթե ավտոմոբիլային արդյունաբերությունը ընդունի իր նոր գյուտը, ապա վարորդները կարող են փոխել իր շարժիչի յուղը միայն յուրաքանչյուր 150,000 մղոնը մեկ, բայց երբեք այդ ընթացքում գազ գնել:
Clem-ի շարժիչը փորձարկվել է Bendix Corporation-ի կողմից: Փորձարկումը բաղկացած էր շարժիչը դինամոմետրին միացնելուց՝ շարժիչի արտադրած հզորությունը ինքնապտտվող ռեժիմում չափելու համար: Նա անշեղորեն թողարկում էր 350 ձիաուժ։ 9 օր անընդմեջ, ինչն ապշեցրել է Bendix-ի ինժեներներին։ Այնուհետև Ռիչարդ Կլեմը ածխի ընկերությունից լուրջ պատվեր ստացավ մի քանի հզոր մեքենաների արտադրության համար, բայց հանկարծամահ եղավ սրտի կաթվածից։
Այս գյուտի պատմության մանրամասները հասանելի են Jerry Decker-ի KeelyNet էջում: Նրա կայքի հասցեն ինձ վաղուց ծանոթ է, խորհուրդ եմ տալիս մանրամասն ուսումնասիրել թեման՝ www.keelynet.com
Մեխանիկական կենտրոնախույս մեքենաների տեսությունը, որոնք ունակ են աշխատել ինքնապտույտի ռեժիմում, լուրջ ուսումնասիրություն է պահանջում։ Ընդհանուր առմամբ, կարելի է ասել, որ կենտրոնախույս ուժը և այլ իներցիոն ազդեցությունները պատկանում են էթերոդինամիկայի ոլորտին։ Իներցիան մարմինը շրջապատող միջավայրի հատկությունն է։ Սրանք արտաքին ուժեր են, ոչ թե փակ համակարգի ներքին ուժեր։ Աերոդինամիկայի նման, միջավայրի ճնշման գրադիենտի առկայության դեպքում, նման բաց համակարգում առաջանում է շարժիչ կամ բարձրացնող ուժ, իսկ որոշ դեպքերում՝ երկու բաղադրիչները։
Ամենապարզ տարբերակում կենտրոնախույս ուժը ստեղծում է մարմնի պոտենցիալ էներգիայի ավելացում՝ առանց հիմնական աղբյուրից էներգիա ծախսելու, և դիզայների խնդիրն է ոչ միայն «ազատել» աշխատանքային զանգվածը և թույլ տալ, որ այն շարժվի երկայնքով։ կենտրոնախույս ուժի գործողության գիծը, բայց միևնույն ժամանակ արդյունավետ օգտագործել նրա կինետիկ էներգիան։
Այս թեման շատ խոստումնալից է, քանի որ սերիական զանգվածային արտադրությամբ նման մեքենաները կարող են դառնալ լայնորեն օգտագործվող պարզ, հուսալի և էժան էներգիայի աղբյուրներ: Ներկայումս՝ 2012 թվականին, մենք աշխատում ենք կենտրոնախույս-պտույտ էներգիայի փոխարկիչի ստեղծման վրա։ Schauberger շարժիչի հիման վրա: Հետազոտության հաշվետվությունը պատրաստ է հզորության հաշվարկներով և փաստաթղթերի փաթեթ 30 կՎտ հզորությամբ շարժիչի արտադրության համար: Մանրամասները www.faraday.ru և http://alexfrolov.narod.ru կայքում
Դիտարկենք ոչ պակաս հայտնի, քան Clem շարժիչը, իսկ ավելի վաղ՝ ինքնապտտվող Schauberger էներգիայի գեներատորը: Մեր խնդիրը չէ դիտարկել ակտիվ (ոչ ռեակտիվ) շարժիչ ուժ ստեղծելու ուղիներ, որն օգտագործվում է ինքնաթիռների նախագծման մեջ։ Վիկտոր Շաուբերգերի գյուտերը մենք կդիտարկենք միայն որպես տեխնիկական լուծումներ, որոնք գործնականում օգտակար են էներգիայի նոր աղբյուրների զարգացման համար։ Այնուամենայնիվ, մենք նշում ենք, որ շարժիչ ուժի երկու բաղադրիչներն էլ (առանցքային և շոշափող) հնարավորություն են տալիս նման մեքենան օգտագործել և որպես էներգիայի աղբյուր, և որպես օդանավի կամ այլ տրանսպորտի ակտիվ (ոչ ռեակտիվ) շարժիչ սարք, օրինակ. ավիացիայի, ծովային, գետային, ավտոմոբիլային կամ երկաթուղային տրանսպորտի համար։
Գյուտարար Վիկտոր Շաուբերգերի պատմությունը շատ հետաքրքիր է, հատկապես այն պատճառով, որ նա գտել է իր մեքենաների բոլոր սկզբունքները Բնության դիտարկումներում: Նրա հիմնական աշխատանքի վայրը Ավստրիայի անտառտնտեսությունն է, որտեղ նա մշակել է ագրոտեխնիկական տեխնոլոգիաներ՝ արտացոլված նրա արտոնագրերում։
Դրա տեղադրման ընդհանուր սխեման մեզ արդեն ծանոթ է Կլեմի աշխատանքներից։ Մեքենայի տարբերակը, որը ներկայացված է նկ. 39, ձախ, առաջարկել է Լեոպոլդ Շերիջուն։ Հայտնի է, որ այն չի իրականացվել, քանի որ ունի թերություններ։ Համաձայն եմ, սխեման շատ նման է Ռիչարդ Կլեմի դիզայնին, բայց Շերջուն կոնի ռոտոր չունի։ Իմ կարծիքով, այս թերությունը կրիտիկական է։ Հեղուկի պտույտը ստեղծում է կենտրոնախույս ուժ, որը մենք պետք է օգտագործենք աշխատանքային հեղուկի կինետիկ էներգիան բարձրացնելու համար։ Այս պայմանը կատարելու համար հեղուկի պտտման շառավիղը պետք է աստիճանաբար մեծանա, գերադասելի է լոգարիթմական պարույրի հետագծի երկայնքով, ինչը հնարավորություն է տալիս մեծացնել հեղուկի արագության ճառագայթային բաղադրիչը կենտրոնախույս ուժի ազդեցության պատճառով:
Բրինձ. 39. Լեոպոլդ Շերժյուի գեներատորի (ձախից) և Ֆրոլովի կենտրոնախույս մեքենայի (աջից) սխեմատիկ դիագրամ։
Այս լուծումը ներկայացված է Նկ. 39, աջ, Ֆրոլովի դիզայն, 2011 թ. Ներկայումս մշակվում է աշխատունակ Schauberger գեներատոր ստեղծելու նախագիծը, և մենք հրավիրում ենք շահագրգիռ ներդրողներին և արդյունաբերական գործընկերներին մասնակցելու նախագծին:
Հետաքրքիր է՝ Ռիչարդ Կլեմը գիտե՞ր Վիկտոր Շաուբերգերի աշխատանքի մասին։ Սա անհավանական է թվում, քանի որ Ռիչարդն աշխատում էր որպես ծանր տեխնիկայի, մասնավորապես, տաք ասֆալտի սրսկիչի հասարակ օպերատոր: Ամենայն հավանականությամբ, այս երկու գյուտերը երկու անկախ նախագծեր են, որոնք դիտարկելիս օգտակար է նմանություններ գտնել և եզրակացություններ անել այս տեսակի մեքենաների նախագծման համար:
Ավստրիայի թանգարանում պահվող Schauberger-ի բնօրինակ սարքի լուսանկարները հրապարակվում են Schauberger ընտանիքի թույլտվությամբ, նրանց կայքը www.pks.or.at Նկ. 40-ը ցույց է տալիս հեղինակին և նրա «տան գեներատորը»: Ջուրը մտնում է վերեւից՝ կոնի նեղ հատվածում։ Հարկ է նշել, որ խողովակներում, բացի ջրից, միշտ էլ քիչ քանակությամբ օդ կա, և այդ պայմանը համարվում է անհրաժեշտ սարքի հաջող աշխատանքի համար։ Լուսանկարում պատկերված է գնդակի տեսքով օդային զտիչ: Մեքենան սարքելիս կարևոր էր փականների և հսկիչ ծորակների օգնությամբ ընտրել խողովակներում ջրի և օդի անհրաժեշտ համակցությունը:
Բրինձ. 40. Վիկտոր Շաուբերգերը և նրա «տնային գեներատորը».
Ներքևի ձախ մասում էլեկտրական գեներատոր է և ճախարակ: Ռոտորը պատրաստված է պղնձե խողովակներից, որոնք փաթաթվում են կոնի շուրջը, ինչպես ցույց է տրված նկարում նկարում: 41.
Բրինձ. 41. Սարք Ավստրիայի Շաուբերգերի թանգարանում
Գազավորված հեղուկն ունի առաձգականություն, որը թույլ է տալիս նրան կուտակել պոտենցիալ էներգիա, երբ հեղուկը սեղմվում է կենտրոնախույս ուժերի ազդեցության տակ, այնուհետև այն վերածում ռոտորի կինետիկ էներգիայի: Մենք արդեն նշել ենք այս նրբերանգը. աշխատանքային հեղուկի առաձգականությունը նման ձևավորումներում անհրաժեշտ է պոտենցիալ էներգիայի փոխակերպման համար: Կենտրոնախույս ուժը սեղմում է աշխատանքային զանգվածը, այն մեծացնում է պոտենցիալ էներգիան։ Ավելին, շառավղով պարույրով շարժվելիս այս էներգիան վերածվում է աշխատանքային զանգվածի կինետիկ էներգիայի, դրա արագացման, ինչպես նաև ռոտորի պտտման մեծացման:
Բացի այդ, անհրաժեշտ է առաձգական միջավայր, քանի որ չսեղմվող հեղուկները չեն կարող շարժվել շարունակական հոսքով արագացումով, առանց ընդհատումների և տուրբուլենտության:
Schauberger մեքենայի վարդակի դիզայնի հետաքրքիր առանձնահատկությունը. օգտագործվում է ներդիր, որը չի պտտվում, բայց խողովակի ելքի մոտ ստեղծում է ջրի պարուրաձև պտույտ, նկ. 42.
Բրինձ. 42. Վարդակ խողովակի վերջում «տնային գեներատոր» Schauberger
Այս տեխնիկական լուծումը լայնորեն հայտնի է այն սարքերի նախագծողներին, որոնցում պահանջվում է բարձրացնել շիթերի արագությունը վարդակի ելքի մոտ: Իր առանցքի շուրջ ջրի հոսքի պտույտ ստեղծելիս դրա ծայրամասում ձևավորվում են միկրոպտույտներ, որոնք խաղում են մի տեսակ առանցքակալի «գնդիկների» դեր, որը նվազեցնում է ջրի շփումը խողովակի պատերի դեմ: Մեր դիզայնում, որը մենք մշակում ենք նմանատիպ սխեմայի համաձայն, Նկ. 39, ճիշտ է, նմանատիպ լուծում է գործում։ Թեման խոստումնալից է, հաշվարկները ցույց են տալիս, որ 3000 ռ/րոպում 30 սմ շառավղով ռոտորը կարող է լիսեռի վրա ապահովել 40 կիլովատ հզորություն։ Մանրամասները՝ http://alexfrolov.narod.ru կայքում
Հայտնի է, որ Schauberger սարքը ոչ միայն մտել է ինքնապտույտի ռեժիմ, այլեւ ստեղծել է մեծ առանցքային (ուղղահայաց) մղման ուժ։ Schauberger-ի սարքերից մեկը փորձարկման ժամանակ դուրս է եկել, ծակել տանիքը և քանդել շենքի մի մասը։
Գյուտարարի ճակատագիրը նրան բերեց Ամերիկա, որտեղ նա վիճեց գործընկերների հետ, թեև նրա գեներատորը շատ լավ էր աշխատում: Անգլերենով պայմանագիրը ստորագրելուց հետո, որը նա չէր հասկանում, Շաուբերգերը վերադարձավ Եվրոպա։ Ավելի ուշ նա իմացել է, որ պայմանագրով իր զարգացումների բոլոր իրավունքները փոխանցել է ամերիկացիներին, և ինքն այլեւս իրավունք չունի զբաղվել այդ ուսումնասիրություններով։
Եվգենի Արսենտիևը իր www.evgars.com կայքում մանրամասնորեն խոսում է այս և այս թեմայի այլ նախագծերի մասին: Հայտնի է նաև մոսկվացի հեղինակ Եվգենի Ստեպանովիչ Պապուշինի՝ աշխատանքի նմանատիպ սկզբունքով «ինքնապտտվող մեքենա» կառուցելու փորձերի մասին, սակայն նրա սխեմաներն ու արդյունքները հասանելի չեն հրապարակման։
Օդի օգտագործմամբ նմանատիպ զարգացում հայտնի էր 1960-ականներին ԱՄՆ-ում։ Գրել է Կարլ Հասկելը: Ներկայումս այն մշակվում է Ռոն Ռոքվելի գլխավորած թիմի կողմից: Այս գյուտի համար արտոնագիր չկա, և շատ քիչ տեղեկատվություն կա, սակայն կարելի է նշել այս ինքնակառավարվող տուրբինի առանձնահատկությունները՝ պտույտները հասնում են րոպեում 100 հազար պտույտի։ Տուրբինին մատակարարվում է մեծ էլեկտրական պոտենցիալ, ըստ երևույթին, շփումը նվազեցնելու համար, հետևաբար, շահագործման ընթացքում օդը իոնացվում է:
Ես կբերեմ ևս մեկ օրինակ էներգիայի ձևերի փոխակերպման արդյունավետությունը բարձրացնելու համար կենտրոնախույս ուժերի, այսինքն՝ եթերային ճնշման գրադիենտի կիրառման մասին պտտվող մարմնի վրա։ 1999 թվականին ես զեկույց էի պատրաստել Սանկտ Պետերբուրգի համալսարանում «Բարձր արդյունավետ ջրի էլեկտրոլիզը» թեմայով գիտաժողովի համար։ Էլեկտրոդների մակերեսին գազի գոյացման պայմանները փոխելու համար տեխնիկական լուծում է առաջարկվել։ Այս լուծումը պետք է ստեղծեր բջջի պտույտ: Առաջարկվող սխեման ներկայացված է նկ. 43.
Բրինձ. 43. Ֆրոլով կենտրոնախույս էլեկտրոլիզատորի սխեմա
Գյուտի էությունը կայանում է նրանում, որ կենտրոնախույս ուժերը, որոնք առաջանում են պտույտի ժամանակ, գործում են գազային շերտի վրա և պոկում այն էլեկտրոդների մակերեսից։ Գազը (ջրածինը) այս նախագծում հավաքվում է պտտման առանցքի մոտ և կարող է արդյունահանվել այնտեղից օգտակար օգտագործման համար: Ենթադրվում էր, որ այս ձևավորման մեջ թթվածինը թողարկվեր մթնոլորտ (կափարիչի անցքեր): Կենտրոնախույս ուժի մեծությունը, որը որոշում է գործընթացի արդյունավետությունը, պետք է լինի առավելագույնը, որը սահմանափակվում է միայն նախագծման հնարավորություններով։ Շարժիչի էներգիայի սպառումը անհրաժեշտ է ռոտորի արագացման փուլում, սակայն ռոտացիան պահպանելու համար պահանջվում է նվազագույն ծախսեր: Այս կենտրոնախույս էլեկտրոլիզատորում արդյունավետությունը որոշվում է էլեկտրոդների մակերևույթի մոտ ջրի մոլեկուլների բևեռացման համար օպտիմալ պայմանների ստեղծմամբ, դրա վրա գազի թաղանթի բացակայության դեպքում (կամ դրա ազդեցության մասնակի նվազմամբ): Փաստորեն, այս մեթոդը նվազեցնում է սկզբնական տարանջատման լարումը, ինչը հանգեցնում է էներգիայի սպառման նվազմանը: Նախագծի մշակումը և իմ կողմից առաջարկվող մեթոդի վերաբերյալ փորձերը հնարավոր են, եթե կա այս թեմայով հետաքրքրված հաճախորդ։ Ես չեմ արտոնագրել այս մեթոդը: Նրա արտասահմանյան անալոգները հայտնի են, օրինակ, ճապոնացի գիտնական Օհմասայի (Japan Techno) աշխատություններում էլեկտրոլիզատորում օգտագործվում են ցածր հաճախականության թրթռումներ, որոնք ապահովում են ջրի ճշգրիտ պտույտը, և ոչ միայն թրթռումները, որոնք արդյունավետորեն հեռացնում են էլեկտրոդների մակերևույթից գազի շերտ. Տեխնոլոգիան նկարագրված է WO 03/048424A1 միջազգային արտոնագրում, որը ներկայացվել է 2004 թվականին։
Կենտրոնախույս էլեկտրոլիզի մեկ այլ մեթոդ մշակվել է հեղինակների կողմից Ստուդեննիկով Վ.Վ. և Կուդինով, Ռուսական դիմում թիվ 2003104497/12 2003 թվականի փետրվարի 17-ի Միջազգային դիմում PCT/RU 03/00413 2003 թվականի սեպտեմբերի 18-ի «Ջրի տարրալուծման տեղադրում էլեկտրոլիզի միջոցով»: Նրանց գյուտը պատկանում է էլեկտրաքիմիայի ոլորտին։ Սխեման ներկայացված է նկ. 44.
Բրինձ. 44. Ստուդեննիկովի և Կուդինովի պտտվող էլեկտրոլիտիկ բջիջի սխեման
Հեղինակների կողմից օգտագործված էլեկտրոլիտի քիմիական բաղադրության առանձնահատկությունն այն է, որ այն պարունակում է ծանր անիոններ և թեթև կատիոններ։ Էլեկտրոլիտը սնվում է ռոտորի մեջ, որը պտտվում է մեծ արագությամբ: Էլեկտրոլիտում կենտրոնախույս ուժերի դաշտում միջավայրը բաժանվում է թեթև և ծանր իոնների, ինչը հանգեցնում է ճառագայթային պոտենցիալների տարբերության, այնուհետև էլեկտրական հոսանքի առաջացմանը, որի շղթան փակվում է պտտվող միջոցով։ մետաղական ռոտոր: Շարժիչի հզորությունը, հեղինակների փորձերում, եղել է 5 կՎտ: Պտտման արագությունը՝ 1500-ից 40000 պտ/րոպ. Այսպիսով, էլեկտրոլիզի համար արտաքին էներգիայի աղբյուր այստեղ չի պահանջվում: Անհրաժեշտ է էլեկտրոլիտը բերել ռոտացիայի, այնուհետև էլեկտրոլիտում ստեղծվում է պոտենցիալ տարբերություն, որն ապահովում է տարանջատման գործընթացը։ Երբ արտաքին սխեման փակ է, դրա մեջ հոսում է հաղորդման հոսանք, որը կարող է զգալի հզորություն ապահովել օգտակար բեռի մեջ, մինչդեռ գործընթացը շարունակվում է էլեկտրոլիտից գազի (թթվածին և ջրածին) արտազատմամբ:
Թթվային էլեկտրոլիտ օգտագործելիս պտտման առանցքի մոտ առաջանում են դրական ջրածնի իոններ։ Մետաղական պատյանից էլեկտրոններ ստանալով՝ նրանք վերամիավորվում են ջրածնի մոլեկուլների մեջ։ Ավելի ծանր անիոնները հավաքվում են պտտվող ծավալի ծայրամասում, էլեկտրոններ նվիրաբերում մետաղական ռոտորի մարմնին, ինչը հանգեցնում է թթվածնի մոլեկուլների առաջացմանը։
Կենտրոնախույս ուժերով լույսի թթվածնի մոլեկուլները ավելի ծանր իոններով մղվում են դեպի պտտվող էլեկտրոլիտի ծավալի առանցքը։ Առանցքի անցքերի միջոցով ստացված թթվածնի և ջրածնի մոլեկուլները հանվում են պտտվող ծավալից և սնվում սպառողին: Ջրի տարրալուծման այս էլեկտրաքիմիական ռեակցիան էնդոթերմ է, այսինքն՝ այն կարող է շարունակվել միայն արտաքին միջավայրի հետ ջերմափոխանակության առկայության դեպքում։ Այդ նպատակով պտտվող ծավալի ծայրամասում սառեցված նստվածքը մտնում է ջերմափոխանակիչի մուտքը, իսկ շրջակա միջավայրի ջերմաստիճանին տաքացած էլեկտրոլիտը մատակարարվում է պտտվող ծավալի կենտրոնական շրջան: Դրսից մաքուր ջրի ավելացումն անհրաժեշտ է, քանի որ ջուրը քայքայվում է թթվածնի և ջրածնի:
Ըստ հեղինակ-մշակողների՝ տեսականորեն սպառված մեխանիկական հզորության յուրաքանչյուր վտ-ի դիմաց արտաքին միջավայրից ներծծվում է 20-ից 88 վտ ջերմություն՝ համապատասխան ջրից արտադրվող գազի քանակին։ Սա նշանակում է 20-ից 1-ի կամ նույնիսկ 88-ից 1-ի արդյունավետությունը: Նման ձևավորման դեպքում էլեկտրոլիզատորի սովորական աշխատանքային ծավալի մեկ խորանարդ մետրը հնարավորություն կտա վայրկյանում արտադրել 3,5 խորանարդ մետր ջրածին:
Ժամանակին հեղինակների տեղեկությունները դրանց զարգացման մասին մեծ հետաքրքրություն են առաջացրել ներդրողների, այդ թվում՝ օտարերկրյա ներդրողների մոտ, սակայն հետագայում հեղինակների շատ հայտարարություններ փորձնականորեն չեն հաստատվել։ 2010 թվականին այս նախագիծը դեռ չի հասել առեւտրայնացման մակարդակին։ Թեման Մոսկվայում անդրադարձել է «Ալամբիկ Ալֆա»-ն։ Կեմերովոյից Անդրեյ Ֆադեևիչ Մակարովը հրապարակել է օգտակար հոդվածներ «Ստուդեննիկովի քիմիաէլեկտրական գրավիտոլիզը» թեմայով։ Լրացուցիչ տեղեկություններ կարելի է գտնել New Energy ամսագրում, մեր կայքում:
Մենք մանրամասնորեն չենք դիտարկի կավիտացիայի միջոցով ջերմության արտադրությունը ջրի պտույտի տարբեր եղանակներով։ Մաղթում եմ ձեզ ուսումնասիրել պտտվող ջերմային գեներատորների (VTG) հիմունքները, խորհուրդ եմ տալիս ինտերնետում գտնել Յուրի Սեմենովիչ Պոտապովի աշխատանքը: Իմ տեսանկյունից, նման սարքերում ավելցուկային ջերմային էներգիան նաև եթերի ազատ էներգիայի փոխակերպման արդյունք է աշխատանքային հեղուկի պտտման ժամանակ առաջացող կենտրոնախույս իներցիոն էֆեկտների միջոցով. ռոտացիան ստեղծում է ճնշում, սեղմում: աշխատանքային հեղուկը և դրա պոտենցիալ էներգիայի ավելացումը, որը կարող է օգտագործվել էներգիայի ինքնավար աղբյուրներ ստեղծելու համար: Կավիտացիոն տիպի սարքերում մնացած բոլոր ազդեցությունները երկրորդական են:
Ի դեպ, մենք ուսումնասիրեցինք ՎՏԳ-ի այս անուղղակի ազդեցություններից մեկը Սանկտ Պետերբուրգի համալսարանի Վալերի Վլադիմիրովիչ Լազարևի հետ համատեղ նախագծում: Մեր փորձի գաղափարն էր ստուգում է կավիտացիայի ազդեցությունը ռադիոակտիվության աստիճանի վրահեղուկ, որը շրջանառվում է WTG-ում: Մենք հաջողությամբ երկու տարբեր փորձերի ընթացքում ցույց ենք տվել, որ կավիտացիայի գործընթացը նվազեցնում է ոչ միայն հեղուկի ռադիոակտիվության մակարդակը, այլև գործող WTG-ի շուրջ ընդհանուր ռադիոակտիվ ֆոնը: Մանրամասներին կարելի է ծանոթանալ www.faraday.ru կայքում:
Այս սկզբունքի վրա հիմնված էներգետիկ ինքնավար սարքերի ստեղծման ոլորտում գործնական հաջողությունները հաջողությամբ և երկար ժամանակ մշակվել են, օրինակ՝ Պոտապովի «քվանտային ջերմաէլեկտրակայանները», նկ. 45.
Բրինձ. 45. ԿՏԵՍ Պոտապով երկաստիճան էլեկտրակայանի սխեման
Դրանցում ոչ միայն տաքացվում է հեղուկը, այլեւ առաջանում է պոմպերին եւ արտաքին սպառողին անհրաժեշտ էլեկտրաէներգիան։ Դիտարկենք սխեման. Պոմպ 6-ը ջուրը մղում է «ցիկլոն» 3-ի մեջ և ջուրը արագացնելուց հետո այն 9-րդ վարդակով դուրս է գալիս հիդրավլիկ տուրբին 11, որը միացված է էլեկտրական գեներատորին: Ստորին տանկի 13-ում տեղադրված է երկրորդ հիդրոտուրբին 14, որը նույնպես միացված է էլեկտրական գեներատորին։ Պտտվող ջերմային գեներատորի վարդակից 9-ից ելքի դեպքում աշխատանքային միջավայրի ջերմաստիճանը կազմում է մոտ 70 - 100 աստիճան Ցելսիուս, իսկ ճնշումը 8 - 10 ատմ: Այս հոսքը ապահովում է առաջին տուրբինը: Ստորին տարայի տուրբինը շարժվում է վերին բեռնարկղից իր քաշի տակ շարժվող հեղուկով: Այսպիսով, ջերմային էներգիայի արտադրության հետ միաժամանակ, որի ստացումն ապահովում է ջերմային գեներատոր 1-ը, տեղադրման մեջ արտադրվում է էլեկտրական էներգիա։ Այս էլեկտրաէներգիան և ջերմությունը ստանալու համար վառելիքի ծախսեր չեն պահանջվում, դրա արտադրությունը էկոլոգիապես մաքուր է: Մենք չունենք տվյալներ արտադրողի, փորձարկման հաշվետվությունների և նման էլեկտրակայանների շահագործման փորձի մասին:
Չորրորդ գործոն գրքից. Ծախսերը՝ կես, վերադարձը՝ կրկնակի հեղինակ Weizsäcker Էռնստ Ուլրիխ ֆոնՄեկուսացման ստեղծագործական ուժը Դարվինը գտավ իր տեսության ամենաուժեղ ապացույցները կղզիների բնակավայրերում, ինչպիսիք են Գալապագոս կղզիները: Նրա առաջին նկարագրած սերինջները շատ տարբեր էին աշխարհի այլ ծայրերում հայտնաբերված սերիններից: Կղզիների բացակայության դեպքում
Հայրենիքի քարտեզից վեր գրքից հեղինակ Միխայլով Նիկոլայ ՆիկոլաևիչՄԱԳՆԻՏԻ ՀԶՈՐՈՒԹՅՈՒՆԸ Հեղափոխությունից շատ առաջ նկատվել է, որ Կուրսկի տափաստաններում կողմնացույցը չարաճճի է։ Նրա սլաքը չի նայում ուղիղ հարավից հյուսիս, այլ շեղվում է.
Վիրտուալ իրականություն. ինչպես սկսվեց գրքից հեղինակը Մելնիկով ԼևՀոսքի ուժը Մեր էլեկտրակայանների մեծ մասը կառուցված է էժան վառելիքի վրա, որը նախկինում համարվում էր թափոն՝ շագանակագույն ածխի, տորֆի, ածխի տուգանքի վրա։ Բայց գետերի վրա դեռ կայաններ կան՝ էներգիայի էժան աղբյուրի վրա, մեծ հիդրոէլեկտրակայան կառուցելը հեշտ չէ։ Անհրաժեշտ է
Բնակելի տիեզերական կայաններ գրքից հեղինակ Բուբնով Իգոր ՆիկոլաևիչԱրվեստի բուժիչ ուժը Մեկ այլ հայտնի խորհրդային հոգեբան Լ.Ս. Վիգոտսկին պնդում էր, որ արվեստն ունի փոխհատուցման գործառույթ: Սա հատկապես կարևոր է դարձնում տիեզերագնացների հոգեֆիզիկական վիճակի կայունացման և շտկման համար։ Այս դեպքում ամենաարդյունավետը
Ռազմական նավեր գրքից հեղինակ Պերլյա Զիգմունդ ՆաումովիչԱՐՀԵՍՏԱԿԱՆ ՁԳԱՎՈՐՈՒԹՅՈՒՆ Տիեզերական բժշկության շատ փորձագետներ երկար ժամանակ աշխատել են անկշռության մեջ գտնվող մարդու խնդրի վրա, սակայն չնայած փորձարարական տվյալների առկայությանը, մարդու վրա անկշռության ազդեցության հետ կապված շատ հարցեր մնում են չլուծված:
Նոր տիեզերական տեխնոլոգիաներ գրքից հեղինակ Ֆրոլով Ալեքսանդր ՎլադիմիրովիչՈւժ և արագություն Մեծ արագությունը շատ կարևոր առավելություն է մարտում: Ավելի արագ նավն իր համար ընտրում է բարենպաստ դիրք և մարտական հեռավորություն։ Եթե նրա հրամանատարը ցանկանում է, նա միշտ կարող է մեծացնել կամ նվազեցնել հեռավորությունը; եթե հակառակորդը խուսափում է կռվից, կարող է
Ստորգետնյա ամպրոպ գրքից հեղինակը՝ Օռլով ՎլադիմիրԳլուխ 3 Մագնուսի էֆեկտը և Լորենցի ուժը Ինչպես Ժուկովսկի-Չապլիգին թևին, Մագնուսի ուժն առաջանում է պտտվող գլանի մակերեսի վրա միջին հոսքի ճնշման տարբերության պատճառով։ Այս էֆեկտը հայտնաբերել է գերմանացի գիտնական Հ.Գ.Մագնուսը 1852 թվականին։ Նկ. 8 ցույց է տրված
100 մեծ նվաճումներ տեխնոլոգիաների աշխարհում գրքից հեղինակ Զիգունենկո Ստանիսլավ ՆիկոլաևիչԳլուխ 27 Քրոնիկ շարժիչ ուժ Զարգացնելով Վեյնիկի գաղափարը, որ առարկայի (մարմնի) նյութի ցանկացած «ինտենսիվ» կարող է օգտագործվել ժամանակագրական դաշտ ստեղծելու և տվյալ նյութական օբյեկտի համար ժամանակի արագությունը փոխելու համար, եկեք դիտարկենք մի պարզ օրինակ.
Խարիսխների գրքից հեղինակ Սկրյագին Լև ՆիկոլաևիչՍԱՄՈՎԱՐԻ ՄԻԼԻԱՐԴՆԵՐԻ ՓՈՓՈԽԱՆՑՄԱՆ ՈՒԺԸ Սկզբից դնենք սամովար։ Որտե՞ղ են ածուխները, ինչպես որտե՞ղ: Այրվել է. Համակցված թթվածնի հետ: վերածվել է ցնդող գազի և թռել խողովակի մեջ։ Սա բոլորը գիտեն։ Ով չի հավատա
Նանոտեխնոլոգիա [Գիտություն, նորարարություն և հնարավորություն] գրքից Ֆոսթեր Լինի կողմիցՄԻԼԻԱՐԴՆԵՐԻ ԻՇԽԱՆՈՒԹՅՈՒՆԸ Եթե սովորական փոթորիկը ավերում է ամբողջ գյուղեր, ապա ի՞նչ կարող է անել պայթյունը՝ երկաթե փոթորիկ... Պայթյունը, երևի թե, թեյի սեղանի փշրանքների պես կփչի մի ամբողջ քաղաքի տները։ Իրականում դա տեղի չի ունենում։ Պատահում է, իհարկե, որ պայթյունից տուն է հանվում։ Բայց հարևան տները
Գյուտի ալգորիթմ գրքից հեղինակ Ալթշուլեր Հենրիխ ՍաուլովիչԱպակու ուժը Պոկվել, ինչպես Արիելը... Սա ոչ միայն գիտաֆանտաստիկ գրողների, այլև շատ գիտնականների երազանքն է: Երևույթը, որը թույլ է տալիս նյութական մարմնին ազատ տեղաշարժվել տարածության մեջ, նրանք վաղուց անվանել են լևիտացիա (հունարեն levitas - «բարձրացում»): մագնիսական լևիտացիա. Այս տերմինը
Հեղինակի գրքից Հեղինակի գրքից10.2. Գաղափարի ուժը. Ո՞րն է իսկապես լավ գաղափարը: Մարդկային ցանկացած գործողություն, ներառյալ կազմակերպությունների ստեղծումը և ստեղծագործությունը, սկսվում է գաղափարից: Ճիշտ ժամանակին արտահայտված հիանալի միտքն ունի անհավատալի ուժ և ստեղծագործական ունակություն: Բիզնեսի համար
Հեղինակի գրքիցՖանտազիայի ուժը Ընդհանուր ճշմարտություն է դարձել, որ ֆանտազիան հսկայական դեր է խաղում ցանկացած ստեղծագործական գործունեության մեջ, ներառյալ գիտական և տեխնիկական: Բայց կա մի զարմանալի պարադոքս՝ ֆանտազիայի մեծագույն արժեքի ճանաչումը չի ուղեկցվում դրա իրականացմանն ուղղված համակարգված ջանքերով։